运动模糊图像方向角的估计方法研究
2012-10-16加春燕王建丽
加春燕,王建丽,刘 鹏
(1.北京工业职业技术学院,北京 100042;2.太原科技大学华科学院,太原 030024;3.山西农业大学信息学院,山西 太谷 030800)
在获取数字图像的过程中,由于设备或者操作者的原因,易造成运动模糊。如果在曝光瞬间,相机镜头和对象之间有相对运动,那么拍摄到的图像便是运动模糊图像。简单的线性运动模糊模型可用一个卷积型方程表示[1]:

其中,g表示运动模糊带噪的图像,f是未受到运动模糊和噪声影响的理想图像,kL,θ代表运动模糊的点扩散函数(PSF),n通常视为高斯白噪声。复原运动模糊图像的目的就是:从观测图像g出发,结合运动模糊的点扩散函数kL,θ和噪声n的相关信息,得出复原图像,复原结果与f越接近越好。
运动模糊的点扩散函数 kL,θ的一般表达式为[2]:

显然,确定kL,θ的关键在于两个重要参数:一是运动模糊的方向角θ,二是运动模糊的长度L.要进行图像复原,需要准确地估计出θ和L,本文主要研究运动模糊图像的方向角θ的估计方法。
1 运动模糊图像的频谱特征分析
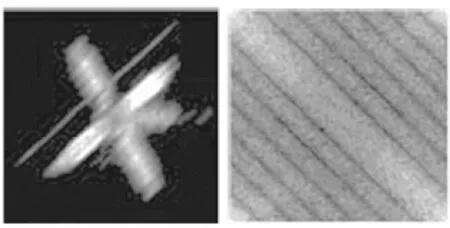
图1 运动模糊图像及其Fourier频谱图像Fig.1 A motion blurred image and its Fourier spectrum image with L=10 pixels and θ =45°
由卷积原理,对模型方程(1)做Fourier变换,得到频域上的方程:

其中K(u,v)为一个Sinc函数,因此,如果运动模糊图像受噪声污染较小,则相应的Fourier频谱图像中会出现平行的黑线,且该组黑线与Y轴的夹角即为运动模糊方向角θ[3].图1中左边为运动模糊图像,其中方向角为45°,右边是对应的频谱图像G(u,v),从中明显看出平行线的特征,且平行线与Y轴的夹角约为45°.显然,频谱图像中的平行黑线是估计θ的重要依据,后面涉及到的方法都是从运动模糊图像的频谱特征出发来估计θ.
2 方向角估计方法的对比研究
2.1 Hough 变换方法
Hough变换通过检测图像中点的共线性来确定图像中最为明显的直线[4]。具体来说,假设图像中有n个特征点,希望找出含特征点最多的直线。1962年数学家Hough提出了一种简单方法:将平面内过一点的所有直线转化为参数空间中的一条正弦曲线,如果参数平面内有K条正弦曲线相交于一点,则对应XY平面内K个点共线[7]。Hough变换检测图像中直线的数值实验过程为:
(ⅰ) 网格剖分 ρ∈ [ρmin,ρmax],θ∈ [θmin,θmax],在 ρθ平面形成网格;
(ⅱ)在ρθ平面每个网格放置一个记数器A(ρ,θ),并设置初值均为0;
(ⅲ)对图像中的每个特征点(xi,yi),依次取θ= θmin∶θmax,之后计算出ρ=xicosθ+yisinθ,于是该网格记数器A(ρ,θ)增加1;
(ⅳ)所有特征点都统计完成后,找到值最大的记数器(比如记为 A(ρ*,θ*),则对应 XY平面中检测出的直线方程为 ρ*=xcosθ*+ysinθ*.
在实际运用中,通常先得到模糊频谱图像的边界图像(二值图像),选取边界点为特征点,再做Hough变换。图2展示了用Hough变换检测运动模糊图像方向角的效果,其中(a)图是运动模糊图像,θ=30°,(b)图显示了Hough变换检测出的直线,对应角度为 30.809°,(c)图中运动方向角 θ=90°,(d)图检测出的结果为90.001°.
2.2 Radon 变换方法
对于函数 G(u,v),其 Radon 变换为[5]:
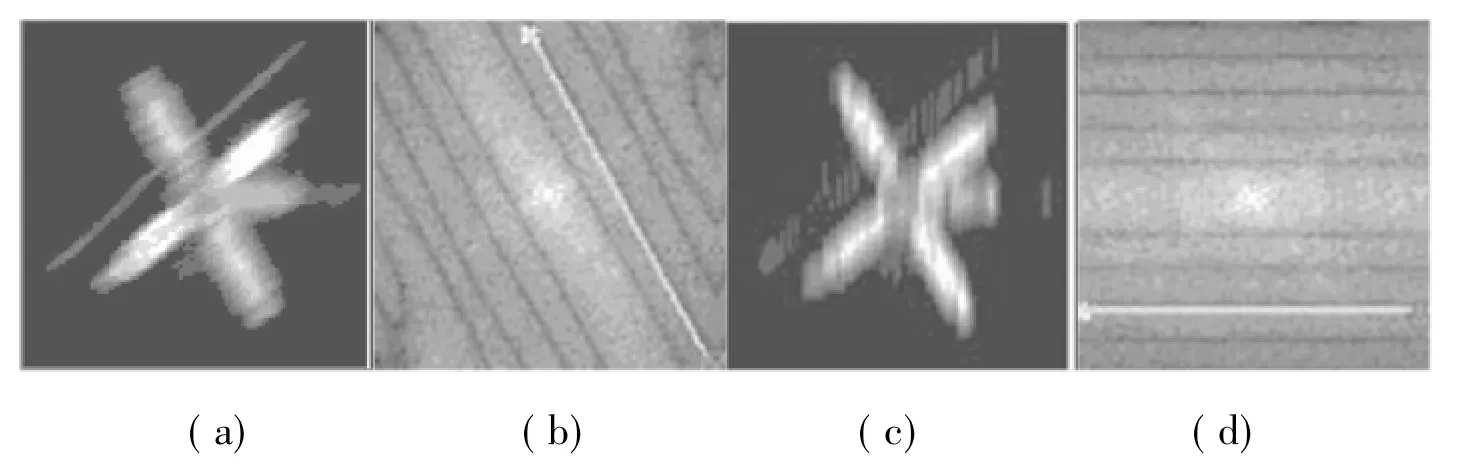
图2 Hough变换估计运动模糊图像的方向角Fig.2 Estimation for angle of motion blurred images by using Hough transform

事实上,G(u,v)的Radon变换是沿着距原点(图像中心)ρ且与Y轴夹角为θ的直线的积分,Radon变换的最大值对应图像中最明显的直线,该直线的角度即为运动模糊图像方向角的估计值。需要注意的是,Radon变换要计算函数沿各个方向直线的积分,而对于有限的图像(一般是矩形)来说,显然图像对角线上的线段最长,积分结果会比较大,因此用Radon变换常常错误的估计出45°或者135°,为了克服这种现象,可以对图像预先归一化,即逐点除以和图像大小相同的全1矩阵,再进行Radon变换。
图3展示了对运动模糊频谱图像做Radon变换的结果,左边是运动模糊频谱图像,其中θ=10°,右边是Radon变换的结果,图像中最亮的地方对应角度为10.052°,估计比较准确。
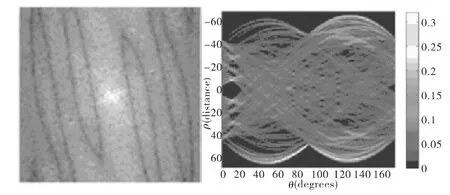
图3 Randon变换估计运动模糊图像的方向角Fig.3 Estimation for angle of motion blurred images by using Radon transform
2.3 Cepstral变换方法
Cepstral变换方法通过计算模糊图像的对数逆频(Cepstrum)来寻找特征[6]。模糊图像 g(x,y)的对数逆频定义为:

对数逆频的一个重要性质是卷积可加性,假设不考虑噪声,即在式(1)中n(x,y)=0,则:
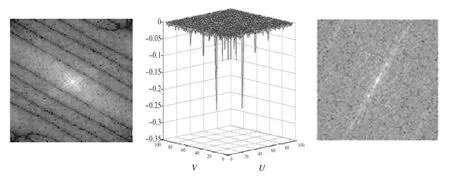
图4 Cepstral变换估计运动模糊图像的方向角Fig.4 Estimation for angle of motion blurred images by using Cepstral transform

模糊核函数kL,θ的Fourier变换K(u,v) 是一个Sinc函数,且在 ±1/L 处值为0[4],于是log|K(u,v)|在 ±1/L处为负无穷大,从而 C(kL,θ(x,y)) 在距原点L处是负无穷大,由于对数逆频的卷积可加性,则这个性质会保留到C(g(x,y))中,即从C(g(x,y))的图像中看,在距原点L处应该有两个大的负峰。因此,要估计运动方向角,只需从第一个峰值处到原点画一条直线,再计算该直线的倾斜角即可。
图4展示了用Cepstral变换估计运动模糊图像方向角的过程。左边是运动模糊频谱图像G(θ=60°),中间是对数逆频图像 C(g(x,y)),从中确实可以看到两个明显的负峰。右边从一个峰值处检测到的直线,该直线的倾斜角为60.213°,与θ的真实值十分接近。
3 三种方法实验结果的综合分析比较
为了对Hough变换、Radon变换和Cepstral变换三种方法进行综合分析比较,利用matlab数学软件编写程序,进行了大量的数值实验。测试图像为256×256的卫星图像(如图1所示),方向角的变化范围是0°~180°,分别设定运动距离L=10和L=40两种情况来测试三种方法对L的敏感度,此外,定义信噪比SNR(见公式7)来衡量噪声水平,从定义可知,SNR越小代表噪声越大,试验中分别取无噪声和SNR=20两种情况来测试三种方法对噪声的敏感度。


表1 无噪声时三种方法估计精度的数值结果Tab.1 Numerical results of three methods with no additive noise

图5 无噪声时三种方法的估计精度Fig.5 Estimation accuracy of three kinds of methods with no additive noise
表1和图5分别展示了无噪声时三种方法的估计精度(误差的绝对值)结果,容易看出,L=10时,Cepstral变换的估计效果最好,其次是Hough变换和Radon变换。而当L=40时,Radon变换的效果最好,其次是 Cepstral变换,Hough变换效果最差,误差高达12°.
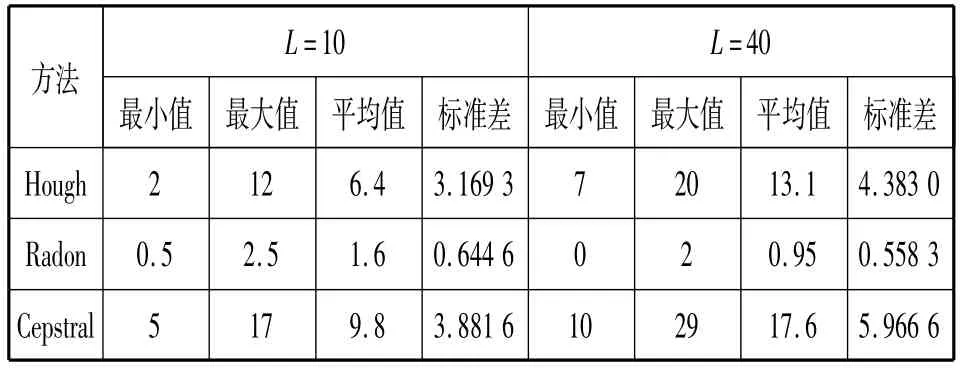
表2 SNR=20时三种方法估计精度的数值结果Tab.2 Numerical results of three methods with SNR=20
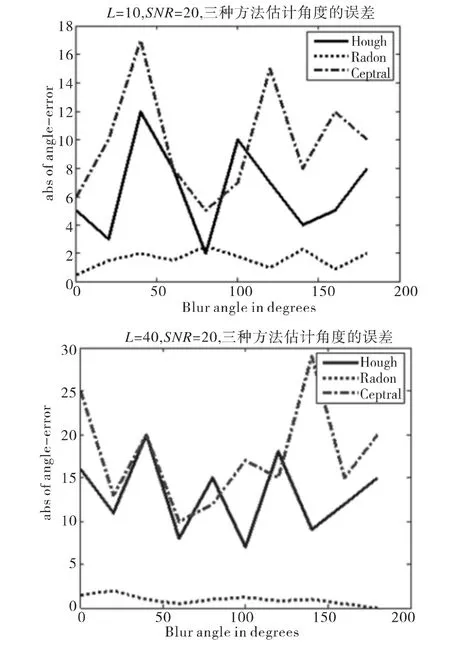
图6 SNR=20时三种方法估计角度的误差绝对值Fig.6 Estimation accuracy of three kinds of methods with SNR=20
表2和图6分别展示了信噪比SNR=20时三种方法的估计精度结果,有了噪声的干扰,估计角度的难度增加,但从结果容易看出,Radon变换的估计效果仍然很好,可见噪声对其影响不大。而Hough变换和Cepstral变换则对噪声比较敏感,平均误差在6.4°~29°之间,精度太低,不适宜估计角度。
根据第2节的原理分析和第3节的数值实验结果,可以得出如下结论:
(1)Hough变换:依赖于选取的特征点,特征点选不好则估计误差大[8]。对于小距离和无噪声干扰的情况,相对容易找到特征点,因此估计效果较好,而当运动距离增大或者加入噪声,则不易找到准确的特征点,从而导致估计结果较差。
(2)Radon变换:整体估计效果较好,噪声干扰对其估计精度的影响不大,且L较大时估计更为准确。
(3)Cepstral方法:运动距离L的大小对其估计精度影响不大,但它对于噪声比较敏感,噪声水平较高时估计不准确。
综上所述,对于给定的运动模糊图像,如果容易找到特征点,可用Hough变换来估计运动角度,反之则失效。假如图像受噪声污染较小,可以选用Cepstral变换方法,反之则用Radon变换方法。在实际的运动模糊图像处理中,由于噪声污染几乎不可避免,且图像千差万别,特征点不易选取,因此,最常用也相对实用的还是Radon变换方法。
4 结语
从运动模糊图像出发,结合其点扩散函数,分析了图像的频谱特征,之后研究了目前估计方向角常用的方法:Hough变换、Radon变换和Cepstral变换,通过分析每种方法的数学原理,结合大量的数值实验,综合比较了三种方法的估计精度,得出了三种方法的适用范围,有助于更为准确地估计运动模糊图像的方向角,进而较好地复原图像。
[1]CHAN T F,SHEN J.Image processing and analysis[M].Philadelphia:SIAM,2005.
[2]孙兆林.Matlab 6.x图像处理[M].北京:清华大学出版社,2002.
[3]LOK HANDE R,ARYA K V.Identification of parameters and restoration of motion blurred images[J].Chinese Journal of Computers,2007,30(4):686-692.
[4]LI Q,YO SHIDA Y.Parameter estimation and restoration for motion blurred images[J].IEICE Transactions on Fundamentals of Electronics,Communications and Computer Sciences,1997,20(8):14-30.
[5]MOGHADDAM M E,JAMZAD M.Finding point spread function of motion blur using radon transform and modeling the motionlength [J].In Proceedings of the 4th IEEE International Symposium on Signal Processing and Information Technology,2004,25(2):310-314.
[6]LOKHANDE R,ARYA K V,GUPTA P.Identification of parameters and restoration of motion blurred images[J].Proceedings of the 2006 ACM symposium on Applied computing,2006,10(3):301-315.
[7]陈高华,卓东风,夏锡瑞.基于Hough变换直线检测中的峰值提取[J].太原科技大学学报,2006,27(4):256-258.
[8]张凤珍,董增寿.基于数学形态学与Hough变换的道路边缘提取[J].太原科技大学学报,2010,31(3):193-196.
