基于HLA和Vega的复杂武器操作训练系统*
2012-10-16李飞翔陈大健
李飞翔 陈大健 张 勇
(东北电子技术研究所 燕郊 065201)
1 引言
随着科学技术的快速发展,武器装备装备也日趋完备和规范。这对操作人员的操作能力提出了更高的要求。进行规范的实战训练是十分必要的。但传统的训练方法已经远远不能满足要求。而且,由于条件的限制,不能进行攻防形式的实战训练。基于HLA分布式仿真和视景仿真的模拟训练系统正是弥补了实战训练的不足,可不受时间和空间的限制,实现不同时间、不同地域、不同天气条件下的仿真训练。同时,由于HLA的可重用性,可以模拟各种复杂程度的系统仿真训练[1]。
2 HLA的特点
HLA体系结构采用面向对象的方法来分析系统。建立不同层次和力度的对象模型,从而促进了仿真系统和仿真部件的重用。HLA的关键组成部分是接口规范,定义了一个联邦演练中支持联邦成员通过RTI实现成员之间相互交互、协调和协同作业的标准服务。最显著的特点是通过提供通用的、相对独立的支撑服务程序,将应用层同其底层支撑环境分离开,即将具体的仿真功能实现、仿真运行管理和底层的通信三者分离开来,隐蔽了各自的实现细节,可以使各部分相对独立的开发,最大程度地利用各自领域的最新技术来实现标准的功能和服务[2]。
HLA主要由三部分组成:HLA规则、HLA接口规范和HLA对象模型模板(OMT,Object Model Template)。
1)HLA规则规定了联邦及其联邦成员所必须遵循的基本准则,表述了HLA中各个部件的功能划分及它们与RTI的关系,以保证联邦中仿真应用间按正确的方式进行交互。
2)HLA的接口规范定义了在仿真系统运行过程中,支持联邦成员之间互操作的标准服务。
3)HLA要求使用对象模型来描述联邦及联邦中的每一个联邦成员,该对象模型描述了联邦执行过程中需要交换的各种数据及相关信息。
HLA按照面向对象的程序设计思想和方法来构建仿真系统,它是在面向对象分析与设计的基础上划分仿真成员,构建仿真联邦的技术。在HLA框架下,一个典型的仿真联邦的逻辑结构如图1所示。

图1 HLA仿真逻辑结构
3 仿真系统构建
一个复杂的武器系统体系结构,对应的作战的基本要素一般包括目标捕获、跟踪和打击等几个方面。装备基本要素中各种形式的目标探测、打击手段组合在一起,就形成了形式多样的武器系统[3]。
武器操作系统中,各装备都有自己的指控软件,装备内部各个设备也有自己的控制单元。指控软件主要负责各个设备之间的调度,设备的控制单元则实现与指控软件的通信,并根据指控的指令执行相应的作战任务。为了保持装备操作的一致性,不改变各装备的指控软件和内部设备的控制单元,即利用TCP/IP通信建立装备之间的联系,利用虚拟串口工具建立装备内部指控与设备控制软件之间的通信。
一些武器装备体系作战对象和作战基本要素中,以图像为主要分析和处理对象。如目标捕获和跟踪从CCD和IRCCD返回的图像中提取目标并计算目标当前的角度信息,捕获设备和跟踪设备的控制软件则通过角度信息控制设备伺服机构的运转,从而实现捕获的持续引导和连续跟踪。由此,基于Vega建立目标捕获、目标跟踪、打击等三维视景仿真模型,它们与各个设备控制单元之间保持原有的通信方式。为了使各个模块之间具有统一的时序管理、对象管理和数据分发管理,采用HLA高层体系结构建立起武器操作仿真体系结构。与原指控软件和控制单元一起组成武器操作训练系统。
至此,武器操作训练系统的基本结构已经形成。其结构组成如图2所示。

图2 武器操作训练系统组成框图
由于不改变装备原有的控制结构,因此操作席与实际装备保持一致。这样,就能取得与实装操作一样的训练效果。
4 仿真程序的开发
1)三维视景仿真模型的建立
针对训练系统建立作战对象的三维目标几何模型,并根据目标的材质和纹理建立目标特性模型库。对目标的建模流程图如图3所示[4]。

图3 三维目标几何模型建模过程
根据不同的作战想定和作战任务,还需要建立不同地形特征的三维场景几何模型,以及相应的目标场景模型库。三维地形的几何建模采用地形的DEM(Digital Elevation Model)数据,利用 MultiGen Creator中的Terrain Project工具,将地形的DEM数据制作成地形的三维几何模型,三维地形的几何建模精度由DEM数据的精度决定,同时为了兼顾仿真的实时性,需进行LOD建模,建模方法框图如图4所示。
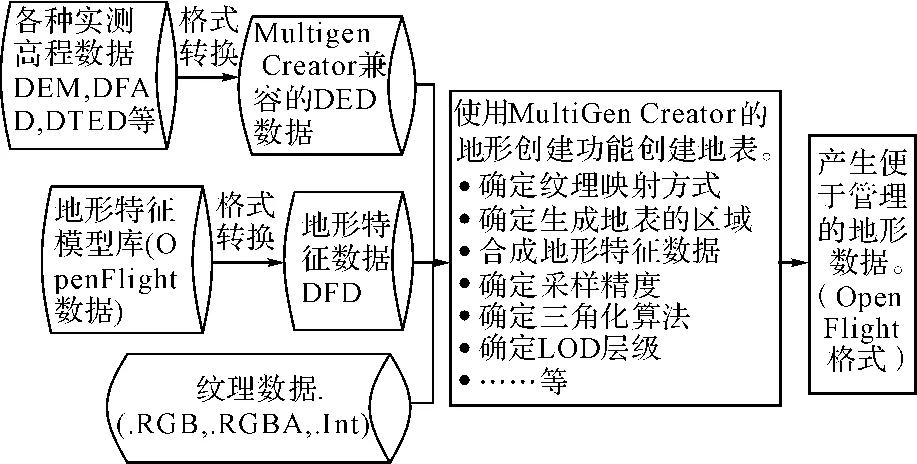
图4 三维地形的几何建模过程
此外,还需要建立大气效应和材质模型库。使目标和场景在变化的大气环境条件下呈现纹理的动态变化过程。
2)Vega视景仿真程序的开发
借助MFC在界面开发、网络通信、数据库管理、多线程支持等方面的优势,建立HLA联邦成员,并加载Vega视景仿真驱动程序。程序可以从不同的视角实现全景展示、探测器效果模拟、不同模型的特效模拟、不同气候的仿真等等。Vega视景仿真程序的开发过程如图5所示[5]。

图5 Vega视景仿真程序开发过程
此系统是基于HLA的武器操作训练系统,这样可以把主要工作集中在研究系统性能,而不必考虑底层的仿真互操作和网络通信等问题,同时由于HLA成员的可重用性,可以快速建造一个复杂的武器操作训练系统。
运行武器操作训练系统,视景仿真节点能将目标运动、目标捕获与跟踪、攻击、目标毁伤等效果以三维可视化的界面显示出来。通过这样的操作训练,能够使每个操作人员熟悉实装的操作和作战效果。在实际装备配置不足的情况下,仍然能起到很好的训练效果。
5 结语
基于HLA和Vega建立武器操作训练系统可以虚拟出真实的战场环境,设计各种复杂环境条件和作战背景下的战场态势。根据建立的数学模型设计的精细程度,甚至可以模拟出各种目标捕获和火力打击的工作过程。采用分布式仿真系统和视景仿真的手段进行武器操作训练系统的仿真有着很广泛的应用前景[6]。
[1]杜亚琦,陈涛,高伟.基于Vega的导弹制导视景仿真系统[J].应用科技,2007,10:28-31.
[2]张家祥.HLA仿真技术应用教程[M].国防工业出版社,2007.
[3]高波,陈红业.基于Vega的红外视景仿真技术[J].光电技术应用,2011,3:10-13.
[4]徐理德,孙文涛.基于Vega光电对抗视景仿真的研究与实现[J].仿真技术,2009,3:201-203.
[5]王宏,杨建军.基于HLA与Vega的地空对抗仿真系统设计[J].系统仿真学报,2007,8:3702-3704.
[6]张静,杨麦顺,刘萍芬.基于Vega的视景仿真应用系统研究与实现[J].微电子学与计算机,2008,2:93-96.