水声定位信号脉冲挑选方法*
2012-10-16于平吴波谢胜
于 平 吴 波 谢 胜
(91388部队水声对抗技术国防科技重点实验室 湛江 524022)
1 引言
水声定位系统的工作原理是通过测量目标声源主动或被动应答发出的声信号,传播到各个接收阵元的时延(对同步系统)或时延差(对异步系统),采用球面交汇(对同步系统)或双曲面交汇(对异步系统)来确定目标在发射信号时刻的水平位置[1~2]。
由于多途信道的影响,使得浮标或水声收发机接收到的信号序列除直达声外还会接收到反射声,同时还会有环境噪声和通道串漏脉冲,成为脉冲干扰。若把干扰脉冲误作直达声进行定位解算,将会造成定位错误或误差。
因此,定位精度的保证依赖于有效的从带有脉冲干扰的脉冲序列中挑选出测距信号的直达声。基于此,本文从分析脉冲序列结构及各脉冲特征出发,对脉冲挑选方法展开研究。
2 脉冲结构分析
为了合理的设计脉冲挑选软件,首先来分析一下各种典型的脉冲结构。
声信号源双脉冲信号经海洋多途信道传播到达测量阵元时,形成含多途及干扰声的多个脉冲序列,图1是根据信道仿真结果结合实际工作状态给出的各种脉冲序列结构示意图。
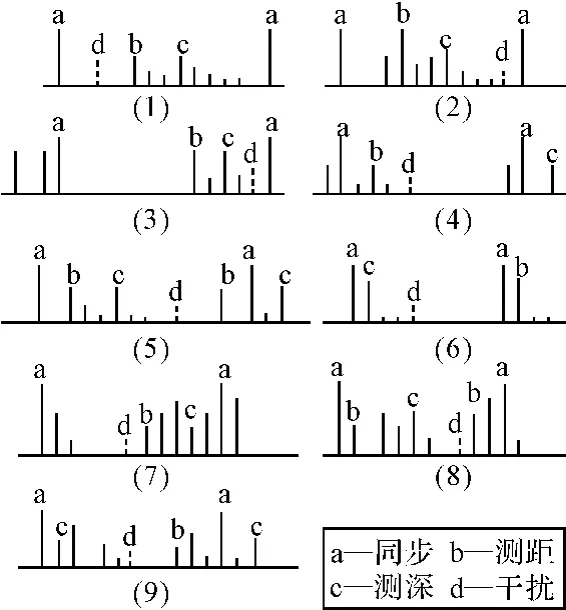
图1 脉冲序列结构示意图
在大多数情况下(图1(1)~(6)),幅度最大的三个脉冲中均包含直达声信息,但在后三种条件下将可能丢失信息。在所有可能的条件下,选五个幅度最大的脉冲都不会丢失信息(阴影区除外)。为保留阴影区的直达声信息,可强制保留每个脉冲群中的第一个脉冲(若某脉冲与前一脉冲的时延差大于200ms即可以认为属于另一脉冲群),另保留的四个幅度最大的脉冲则除图1(7)可能丢失一个测深脉冲外无信息损失。由于深度信息冗余量较大,而图1(7)所示结构(测距和测深脉冲各有两个以上反射声大于直达声)仅在特定的海况下特定的距离范围内才会发生,丢失某个阵元的一个测深脉冲并不影响定位和目标深度测量。“保留首脉冲”的重要意义在于最大限度的减小测距直达声的漏报。
3 脉冲特征分析
各阵元接收脉冲序列,除真脉冲外,还存在由多途信道产生的反射脉冲、信道串漏脉冲、环境噪声。下面通过南海实测数据分析它们的特征特性。
3.1 反射脉冲
由于信道的影响声波的能量将逐渐下降,对于反射脉冲,其到达时间较真脉冲晚,因而能量较直达声能量小,其他特征与直达声脉冲相似。如表1各帧脉冲数据,接收时延较直达声脉冲逐渐增大,幅度逐渐减小。
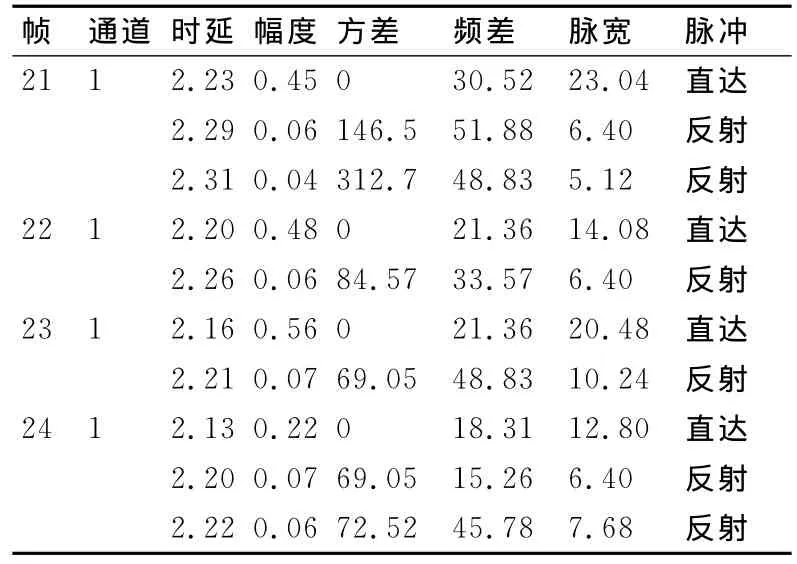
表1 直达脉冲和反射脉冲特征对比表
3.2 信道串漏脉冲
信道串漏主要产生于临近频率通道,因此,布阵时应尽可能将相邻频率阵元分布于尽量远的位置。对于信道串漏脉冲,如表2所示,串漏信道与原信道脉冲的幅度差异较大,时延几乎相同,同时,瞬时频率方差比真脉冲大。

表2 信道串漏脉冲特征对比表
3.3 噪声脉冲
对于各种环境噪声产生的虚警脉冲,可利用幅度、频率、脉宽、方差等参数的大小加以判别:尖脉冲干扰的瞬时频率方差应比真脉冲大;以目标的最高航速估算,接收到的脉冲信号多普勒应在一定范围内;发射信号经过信道后会出现边沿并有一定的展宽,因此直达声的脉宽不会过于小。
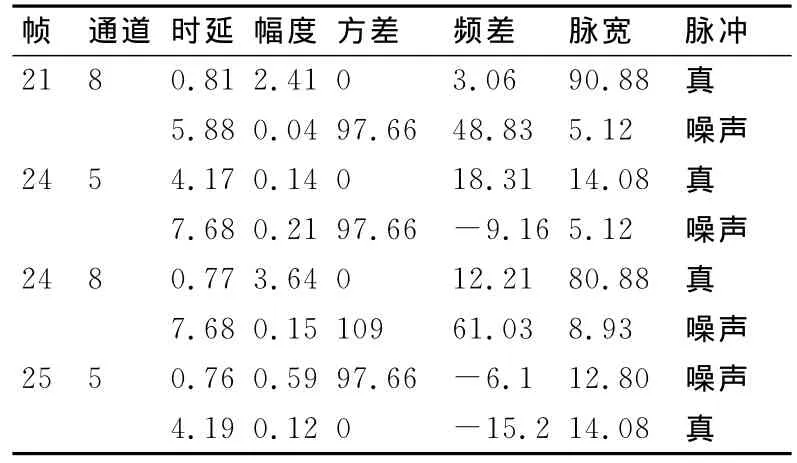
表3 噪声脉冲与真脉冲特征对比表
如表3第21帧8通道两个脉冲数据可通过幅度、方差、频差判别噪声脉冲和真脉冲;第24帧5通道数据可通过方差、脉宽判断;第24帧8通道数据可通过幅度、方差判断;第25帧5通道数据可通过方差判断。
有时噪声脉冲特征与真脉冲特征相似,判断参数较少,此时可以根据时延的连续性调整。如第26帧5通道数据,不能仅凭方差一项判别噪声脉冲的,可根据第24帧5通道帧真脉冲4.17s,判断本帧真脉冲应为4.19s。
4 脉冲挑选方法
根据以上对脉冲结构和特征的分析,建立一系列判据,根据这些判据为每一个有效脉冲评定品质因数,然后依据品质因数选出最优脉冲参与解算。
设每个阵元记录了最多m个脉冲的信息传给计算机,设Qai为直达脉冲品质因数,记f0为信号载频,tki为第k帧收到的第i个脉冲信号的时延值,tk-1表示上个周期选出的最优脉冲,Ti表示脉冲的脉宽,则评定品质因数的判据如下:
判据①:制保留每个脉冲群中的首脉冲,若某脉冲与前一脉冲的时延差大于200ms,即可认为属于另一脉冲群。
对于同一周期,当

时,令Qai=Qai+5。
判据②:由于信道的影响,声波的能量将逐渐衰减,一般情况下,直达声先于反射声到达,因而能量较大。
判据③:信道串漏脉冲和尖脉冲干扰的瞬时频率方差较大,增加方差小的脉冲的品种因数。
当Vki>Vmax时,令Qai=0。
判据④:以最高航速估算,接收到的脉冲信号多卜勒Δf在一定范围内。当|Δf|>3%f0时,令Qai=Qai-4。
判据⑤:直达声的脉宽不会过于小。
当Tki<Tmin时,令Qai=Qai-4。
判据⑥:比较当前脉冲与其它通道所有脉冲的时延,若其差值接近于0,则幅度小的脉冲的品质因数置0。如果幅度接近,则脉宽小的脉冲的品质因数置0。
当目标位于两阵元中点时,理想情况下,其时延也应该相等,应用判据⑥必然会产生误判。在实际应用中,可以忽略这种误判,原因是目标位于这种特殊位置点的概率很小,而且即使发生这种情况,可利用冗余阵元参加定位解算。
判据⑦:由于目标是运动的,如果是直达脉冲,则在相邻周期一定的时延差内必定存在与之对应的脉冲,也就是时延的连续性。为此,我们将本帧的每个脉冲与上一帧的选出的脉冲相比,判断其差值是否在一周期目标所能航行的最大距离范围内。
当|tki-tk-1|<HCmax*T时,令Qai=Qai+3。
5 实验室测试结果分析
在实验室将声模拟器的发射换能器与浮标的接收水听器置于同一水桶中,声模拟器在外同步触发下发射几个相邻频率的信号,定位浮标同步接收并检测信号时延,由于相邻频率信号之间幅度相当,导致串漏严重,测量结果如图2。图2(a)为原始声学脉冲,图2(b)为挑选后的脉冲,脉冲挑选方法能够有效的剔除串漏脉冲。
6 海试结果分析
本文脉冲挑选方法应用于某水声定位系统,2010年某海域进行了定位跟踪试验。脉冲测量及挑选结果如图3,图3(a)为原始声学脉冲,图3(b)为挑选后的脉冲,通过对比可见脉冲挑选方法能够有效的抗多途及噪声干扰,并能够有效地剔除串漏脉冲。
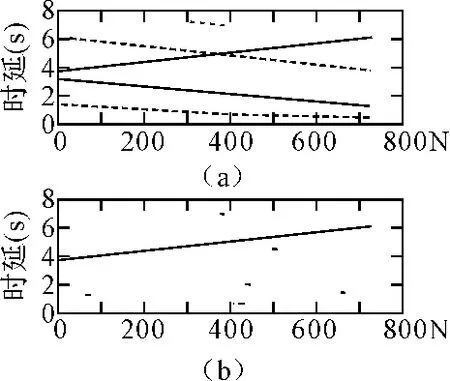
图2 实验室测试脉冲挑选结果

图3 脉冲挑选海试结果
7 结语
本文从分析脉冲序列结构及各脉冲特征出发,研究脉冲挑选方法,并在实验室测试和海上试验中得到有效验证。本文脉冲挑选方法可应用于不同的水声测量定位系统,其品质因子的评定幅度应根据不同海域实际情况进行调整。
[1]江铁彪,陈清波.一种解决定位模糊区域的数据处理方法[J].海上试验靶场,1996(2):34-36.
[2]田坦,刘国枝,孙大军.声呐技术[M].哈尔滨:哈尔滨工程大学出版社,2000:247-263.
[3]R.J.尤立克.水声原理[M].洪申,译.哈尔滨:哈尔滨船舶工程学院出版社,1990:79-183.
[4]马大猷.现代声学理论基础[M].北京:科学出版社,2004.
[5]TMS320VC5409Fixed-point Digital Signal Processor Data Sheet,2000,1.
[6]FLEX10KEmbedded Programmable Logic Family Data Sheet.June 1999.Ver 4.01.
[7]刘伯胜,雷家煜.水声学原理[M].哈尔滨:哈尔滨工程大学出版社,1993:59-119.
[8]孙仲康,陈辉煌.定位导航与制导[M].北京:国防工业出版社.
[9]王正明,易东云,等.测量数据建模与参数估计[M].长沙:国防科技大学出版社,1996.
