容错组合导航系统中的联邦滤波器应用研究*
2012-10-16雷江涛
雷江涛
(西安市76号信箱 西安 710075)
1 引言
随着国内外关于组合导航的容错技术研究的开展,为进一步提高和改善分散滤波的性能,1988年Carlson提出了联邦滤波器理论。它对子滤波器的估计信息进行合成,子滤波器是平行结构形式,各子滤波器算法采用Kalman滤波算法,处理自己传感器的测量信息。联邦滤波方法由于计算量小,实现简单,信息分配方式灵活,具有良好的容错结构,受到许多研究者的关注,美国空军已将联邦滤波器列为新一代导航系统通用的滤波器[1]。
2 联邦滤波器
2.1 联邦滤波器的结构
Calson提出的联邦滤波器是一种两级滤波。对于组合导航系统,捷联惯导系统一般是公共参考系统,它的输出一方面直接给主滤波器,另一方面给各子滤波器(即局部滤波器)作为公共状态变量值。各子滤波器的局部估计值(公共状态)及其协方差阵。送入主滤波器,和主滤波器的估计值一起进行融合以得到全局最优估计。此外,由子滤波器与主滤波器合成的全局估计值及其相应的协方差阵放大为后再反馈到各子滤波器以重置各子滤波器的估计值,即:

联邦滤波器可以有多种实现形式,各种实现形式由于信息分配系数和信息反馈过程不同而有不同的结构和特点。根据主滤波器和子滤波器信息处理方式的不同,联邦滤可以分为以下四种基本结构:
1)融合-重置式(fusion-reset mode,FR)结构;
2)零重置式(zero-reset mode,ZR)结构;
3)无重置式(no-reset mode,NR)结构;
4)重调式(rescale mode,RS)结构。
2.2 联邦滤波器工作流程
联邦滤波器是一种崭新的分散化滤波方法,甚至可以把它从分散化滤波中独立出来[2],联邦滤波器致力于解决以下几个问题:滤波器的容错性能要好;滤波精度要高;全局滤波的融合算法要简单,计算量小,数据通讯少,利于实时执行。
但上述几个性能要求相互有矛盾,如要容错性能好,有时就要牺牲一些精度。联邦滤波器中用了信息分配原则,通过将系统中的信息进行不同的分配,获得最佳的折中,以满足不同的使用要求。
2.3 联邦滤波器的特点
联邦滤波器与集中式融合相比,最大的优越性在速度和容错方面[3]。
1)容错
联邦滤波器中,各子滤波器相对独立,尤其是NR结构,各子滤波器之间没有交叉污染,一旦某一子系统出现故障,故障限制在一个子滤波器内。当检测出故障后,隔离故障子滤波器,保证系统正常运转。联邦滤波在上述诸方面的优越性使它成为智能容错组合导航系统的首选方案。
2)速度
联邦滤波器各子滤波器的滤波运算是并行的,这使得运算速度大大提高。如果主滤波器在子滤波器进行多步后再作融合,运算速度将进一步加快。联邦滤波器的运算时间仅为集中式融合的几分之一,实时性较好。
3)灵活性
每步都作融合并对子滤波器进行重置的FR结构能够获得总体最优的精度,多步后再作融合并对子滤波器重置的结构可以获得总体的次优精度。后者的优点是使主滤波器的计算量大大降低,可降为最大。
3 联邦滤波器在容错组合导航设计中的应用
3.1 容错组合导航系统设计方法
容错组合导航系统设计的出发点是在现有导航设备的基础上,从系统的整体设计上来提高导航系统的可靠性,而不是提高各子导航设备的基本可靠性[4]。在联邦滤波结构中,无重置式(NR)结构具有很强的容错能力。首先,各子滤波器独立工作;其次,由于没有主滤波器到子滤波器的信息重置,使它们相互之间没有污染能力,互不干扰,最适于故障检测;另外,主滤波器对局部滤波器有很强的故障检测、隔离和恢复能力。当故障滤波器被检测到后,主滤波器可以很快地拒绝接纳它的信息,而融合剩余子滤波器的信息,得到系统的最优估计,如图1所示。
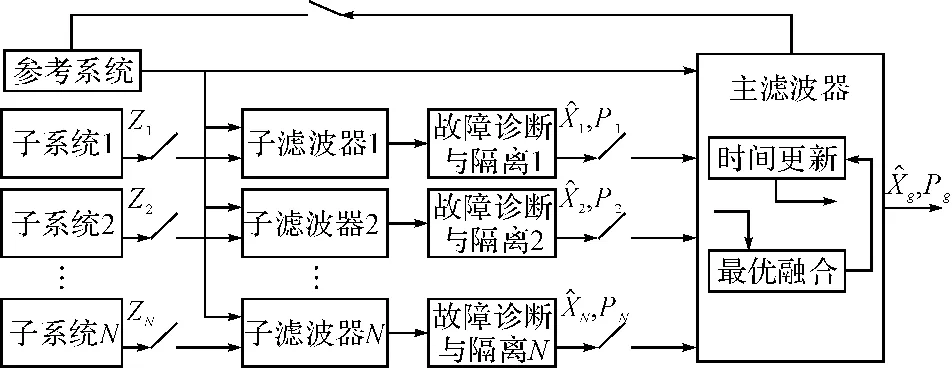
图1 联邦滤波器的故障诊断与隔离
3.2 联邦滤波器容错性能分析
在容错组合导航系统设计中,联邦滤波器起到了关键作用,有必要对它的各种结构的容错性能作深入分析,并与集中式融合结构的容错性能进行比较。
3.2.1 集中式融合结构容错性能分析
集中式融合结构用一个滤波器来处理所有子系统的量测信息,其容错性能分析如下:

可以较好地检测和隔离某些子系统的突变故障。故障开始就很小,不易检测,被软故障污染了的输出将影响预报值,使它跟踪故障输出,残差即新息rk一直保持比较小,因此难以发现软故障。因而软残差检验法对软故障的检测不是很有效。故障子系统被隔离后,已被故障污染的滤波解必须重新恢复正常。这需要重新初始化已经隔离了故障子系统的集中滤波器,重新利用无故障子系统的新的信息,所以必须经过一段过渡过程后,系统的滤波解才恢复正常。因此其故障恢复能力不强。
3.2.2 联邦滤波器容错性能分析
相对集中式融合结构来讲,联邦滤波器的容错性能要强许多,它具有以下优点:
1)主滤波器可以使用一个比子滤波器甚至比集中滤波器更精确的惯导模型,这样检测惯导系统故障的能力就提高了。
2)子滤波器自身子系统误差状态是分开估计的。这些子系统误差状态在子滤波周期内不会受其它子系统的故障影响,只有在较长的融合周期后才会有影响。
3)当故障被检测和隔离后,只要没有重置,其它正常的子滤波器的解仍存在,于是利用这些正常的子滤波器的解经过融合算法可以立即得到全局解,所以故障恢复能力很强。
因为融合周期可以长于子滤波的周期,于是在融合之前,软故障可以有较长的时间去发展到可被主滤波器检测的程度。
3.2.3 联邦滤波器四种结构的比较
从运算速度方面来看,NR结构不需要重置,ZR和RS结构需要重置,但可以在子滤波器向主滤波器发送完状态估计值和方差信息后立即进行,FR方式则必须等到主滤波器的融合结束之后各子滤波器才能得到自己的重置值。因此,从运算速度上来看,NR最快,ZR和RS居中,FR最慢。从计算量的大小来考虑,NR最小,ZR和RS居中,FR最大。
总而言之,NR结构在运算速度和容错能力方面均较好,它的缺点是精度有点低,并需要各子滤波器在同一时刻把自己的估计结果送入主滤波器。ZR和RS结构允许子滤波器的估计值在不同时刻送入主滤波器,但容错性能较差。FR方式具有最好的精度,但容错性能不理想,实现起来也较为复杂。
4 联邦滤波器的应用展望
目前在组合导航中,传感器的数量和种类越来越多,虽然随着计算机技术的飞速发展,计算负担重的困难将越来越降为次要矛盾,但对容错性和估计精度的要求却越来越高。采用联邦滤波器结构的组合导航系统不仅分散和减少了卡尔曼滤波的计算量,保证了系统实时工作,很方便地对各子系统作故障检测、诊断和隔离,并能对组合导航系统进行重构,确保系统可靠的工作,因此联邦滤波器经常被应用于组合导航系统设计中。文献[6]对联邦滤波器在INS/DVL/SAR组合导航信息融合中的应用进行了分析,文献[8]对INS/GPS/DVL组合导航系统中的容错设计的应用进行了分析,文献[9~11]对其在船舶系统工程等中的应用进行了分析,文献[13]提出了基于RBF神经网络的组合导航容错算法。
5 结语
随着传感器技术、数据处理技术、计算机技术、网络通讯技术、人工智能技术、并行处理技术等相关技术的发展,多传感器信息融合将成为未来大量军用和民用高科技系统的重要技术手段。联邦滤波器以良好的容错性、实时性和灵活的信息分配方式等特点,必将受到重视,应用范围将进一步扩大,在提高多传感器信息融合系统精度和可靠性方面发挥重要的作用。
[1]韩崇昭,朱洪艳,段战胜,等.多源信息融合[M].北京:清华大学出版社,2006.
[1]HanChongZhao,Zhuhongyan,Duanzhansheng,et al.Composite source of information integration[M].Beijing:Tsinghua University press,2006:27-85.
[2]Gao Y.Comparison of centralized and federated filters[J].Navigation,1992,40(1):69-86.
[3]秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安,西北工业大学出版社,1998.
[4]付梦印,邓志红,张继伟.Kalman滤波及其在导航系统中的应用[M].北京:科学出版社,2003.
[5]袁信,余济祥,陈哲.导航系统[M].北京:航空工业出版社,1993.
[6]高社社,李华星.INS/SAR组合导航定位技术与应用[M].西安:西北工业大学出版社,1993.
[7]高亚楠,陈家斌.惯性导航系统中的Kalman滤波技术[J].火力与指挥控制,2005(1).
[8]张双同,陈锋,李晓勇.航天测量船INS/GPS/DVL组合导航系统容错滤波方法[J].中国惯性技术学报,2006(5):21-27.
[9]钱华明,丁凯,雷艳敏.联邦滤波器及其在船舶组合导航中的应用[J].船舶工程,2007(3):18-21.
[10]万鹏程,胡致强.抑制Kalman滤波发散的方法及其进展[J].信息技术,1999(3).
[11]韩崇昭.信息融合理论与应用[J].中国基础科学,2000(7):14-18.
[12]戴邵武,马长里,代海霞.北斗双星/SINS组合导航中的捷联惯导算法研究[J].计算机与数字工程,2010,38(2).
[13]陈建勇,王树宗.基于RBF神经网络的组合导航融合算法[J].数据采集与处理,2006(2):198-202.
