单神经元PID自适应控制器的设计
2012-10-15林建凡
林建凡
集美大学工程训练中心,福建厦门 361021
0 引言
随着科学技术的不断进步和发展,传统PID控制技术难以达到人们的精确要求。单神经元PID自适应控制器能较好地解决这类问题而得以广泛地应用[1]。本文设计一种具有自适应、自学习功能的单神经元PID控制器,由仿真结果研究了该控制中参数的影响性。
1 单神经元自适应 PID 控制器
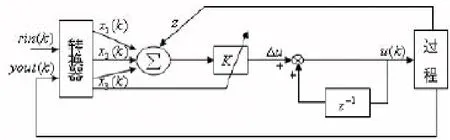
图1 结构框图
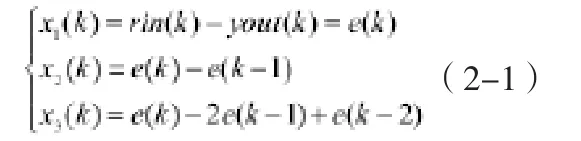
图1为单神经元自适应PID控制器的结构框图,其中r(k)和输出y(k)为转换器的输入,x1(k),x2(k),x3(k)为转换器输出神经元学习控制所需要的状态量。


式2-2中wi(k)为xi(k)加权系数。
调整加权系数可以让单神经元PID控制器实现自适应、自学习,采用不同的学习规则可以形成相应的控制算法。
2 单神经元自适应PID控制系统及MATLAB仿真
2.1 单神经元自适应PID控制系统的原理
利用单神经元PID的控制,我们能够实现对多个变量的控制,图2的控制系统由两个单神经元控制器组成[2]。
单神经元自适应PID控制器要实现自适应,自组织功能的功能,我们可以通过对加权系数来调整而达到这一目的,例如有监督的Hebb学习规则。下面的公式3-1,3-2为相应的算法:

ηP、ηI、ηD 分别代表PID控制器的比例、积分、微分学习速率,k为比例系数,k>0。
在公式3-1中,k值要在合适的范围内,过小或者过大都会产生不理想的状态。k过小,会使系统的快速性变差;k过大,快速性好,但会导致系统不稳定。
2.2 单神经元自适应PID控制仿真程序
设有耦合二变量耦合被控对象:

设采样时间T=1s,给定输入为单位阶跃输入,即:

响应曲线如图3和图4所示。

图3 y1(k)响应曲线

图4 y2(k)响应曲线
图5 是单神经元PID控制的Simulink仿真程序:

图5 单神经元PID控制的Simulink仿真程序
2.3 分析与结论
单神经元PID控制因为具备了自学习与自适应的特性,相对于传统PID控制无法快速反应的缺陷,更能适应现代工业的发展需求。
结果表明,该控制系统兼备了传统PID控制结构简单、调整方便的优点和单神经元的自学习、自适应的优点,避免了传统PID控制的一些缺陷, 能得到较为理想的控制效果。
3 结论
从Simulink仿真结果可以看出,单神经元自适应PID控制器不但具有神经元的自学习、自适应的优点,同时整个系统具有较好的鲁棒性,比常规PID控制系统的性能更优秀。由此可见,单神经元自适应PID控制具有良好的应用前景。
从以上的实验我们可以看到k值的选择是至关重要的,过小或者过大都会产生不理想的状态。过小,会使系统的快速性变差;过大,快速性好,但会导致系统不稳定。
也就是说,k值的选择决定控制系统的跟踪性能与收敛速度。由于时间与精力有限,没有进行对k值在线调整的测试,通过改进算法便可实现在线调整。
[1]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002.
[2]邱公伟,林瑞全.神经元微分先行PID控制器的研究[J].工业仪表与自动化装置,2003(2).
