嵌入式坦克射击训练运动参数监测系统设计
2012-10-08邵思杰刘全胜
邵思杰,刘全胜,林 海
(1.装甲兵工程学院兵器工程系,北京100072;2.装甲兵工程学院训练部,北京100072)
单车射击训练是装甲机械化部队专业训练的重要组成部分,是集单车指挥、武器操作、通信、驾驶于一体的综合应用训练。为规范训练,保证质量,总参谋部颁发了《装甲兵专业技术教范》(射击专业),对训练的内容、条件、组织、考核进行了明确的规范。《教范》规定的单车射击方式有原地、短停、行进间射击3种,其中短停射击应用最为普遍。短停射击动作的质量标准反映在短停时间、跃进距离和跃进速度上,尤其短停时间既可反映射手的射击技能,又可反映全车乘员的技术动作和协同动作。在坦克实弹射击训练中,全车的成绩是由坦克行驶过程的平均速度、总行驶时间、短停次数、每次短停时间及射弹命中数来综合评定的。因此需要通过技术手段来自动监测坦克实弹射击过程中运动参数,记录考核过程中的时间、速度、距离等数据,以保证考核的公正性和客观性。
目前,在单车射击训练和考核时,采用人工方式仅对短停时间进行记录。由于射击过程中扬尘大,观察距离远(为保证记时人员的安全),手动计时的误差比较大,存在考核工作量大、主观影响因素多、准确度差等问题,不能完全满足部队训练考评需求。
本文研究的嵌入式坦克射击训练运动参数监测系统(以下简称“系统”)采用传感器及计算机控制技术,实时监测坦克运行状况,以坦克进入考核场地的时刻为相对初始时刻,以驶出考核场地的时刻为相对终止时刻,测量和记录坦克的瞬时速度、短停时间、短停次数、总行驶时间、跃进速度、跃进时间等,并将上述结果以无线通讯的方式传回后方指挥所,结合实弹射击命中结果自动给出射击成绩,实现了短停射击训练成绩的自动评定。
1 系统组成及主要功能
系统组成如图1所示,由标志坦克进、出考核场地的地面标杆,车上嵌入式系统和终端处理3大部分组成。

图1 系统组成框图
地面标杆部分安装于底座上,分置于考核跑道的两端,其上安装的线激光发射器产生的线激光信号被车上嵌入式系统的光电传感器接收,并以此信号作为坦克在考核场地行驶总时间计时的起、止信号。安装于坦克侧甲板上的霍尔传感器探头正对以圆周方式均匀分布在车轮上的磁钢,车轮转动时,每一个磁钢经过探头都会使霍尔传感器输出一个信号,从而反映坦克的运动状态:运动或停止。光电传感器和霍尔传感器的输出信号输入到AVR单片机系统,经过处理运算得到坦克的全部运动参数,并由无线数传模块传送至终端处理部分的考核终端主机,进行数据的进一步处理、分析与结果输出。
系统具备如下功能:
1)自动、实时、准确记录坦克运动参数;
2)具有数据的无线传输功能,传输距离不小于2 km;
3)不对坦克进行改装,适合多种车型;
4)适应野外行车环境。
2 机械结构设计
为了满足不改装坦克以及便于野外行车的需求,采用如图2所示的机械结构设计,图中虚线所框部分为车上嵌入式系统,由坦克蓄电池供电。将单片机控制电路的PCB板及无线通信模块置于控制盒内,控制盒下端空心连杆内放置磁铁,安装时只需将车上嵌入式系统吸附在履带上方车体上。为了避免太阳光对光电接收电路的影响,将光电接收电路的PCB板置于空心圆柱体内,将正对光电三极管的圆柱体表面开一细缝,组成光栅结构。

图2 机械结构
3 系统硬件设计
系统的硬件设计主要包括光电接收电路设计、AVR单片机系统设计和无线通信电路设计。
3.1 光电接收电路设计
光电传感器选用光电三极管,采用并联方式实现线“与”功能,呈直线布于PCB板上。通过PNP三极管9012来增大光接收的灵敏度。光电接收电路如图3所示。
坦克经过考核场地起点处地面标杆时,只要有一个光电三极管接收到线激光器的信号,三极管Qi立即导通,LR端输出低电平信号至单片机,此为计时开始信号。同理,当车体经过跑道终点标杆的线激光器时,LR再次输出低电平信号至单片机,此信号为计时终止信号。因此,根据LR输出信号,单片机系统可以计算出坦克行驶的总时间,实现计时功能。

图3 光电接收电路
3.2 AVR单片机系统设计
ATmega8是基于增强的AVR RISC结构的低功耗8位CMOS微控制器[1]。由于其先进的指令集以及单时钟周期指令执行时间,ATmega8的数据吞吐率高达每秒百万条指令,从而可以缓解系统在功耗和处理速度之间的矛盾。另外,ATmega8的3个具有比较模式的灵活的定时器/计时器(T/C)、片内/外中断以及可编程串行USART接口,可以方便地实现系统的计时、速度计算以及通讯功能。表1为ATmega8的主要管脚分配。
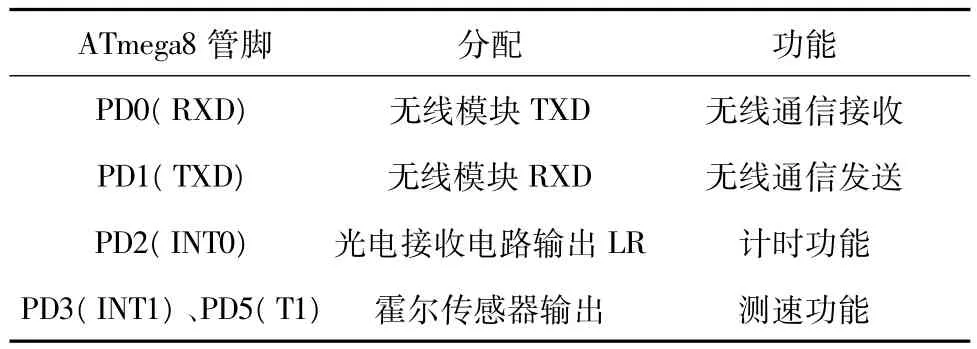
表1 ATmega8管脚分配
3.3 无线通信电路设计
采用上海商锐电子的SRWF-1028通用透明传输模块[2]。该模块工作频率可在 403、433、470、868、915 MHz中选择,传输距离远,抗干扰能力强。同时,该模块提供8种可选信道,具有TTL、RS232、RS485三种接口方式。
本设计中,用于终端处理部分的无线通信模块选用RS232接口方式直接和终端考核主机相连。用于车上测试部分的无线通信模块选用TTL接口方式和AVR单片机Atmega8的TXD、RXD相连。由于系统利用坦克蓄电池供电,为了避免发电机启动、车载电台工作、炮塔转动、武器使用等坦克负载变化对电源的强电流干扰,无线通信电路采用光电隔离措施,电路设计如图4所示。

图4 无线通信电路
4 系统软件设计
4.1 测速、计时软件
4.1.1 测速软件设计
利用霍尔传感器进行测速时[3-5],采用脉冲计数法:车轮旋转时,传感器产生一个或多个脉冲信号,脉冲信号送入单片机进行计数,通过单片机计算出坦克瞬时速度、短停时间、跃进距离,通过串口模块发送到上位机进行数据的统计处理。测速处理软件流程如图5所示。

图5 测速软件流程
图2所示的磁钢一共有10个,均匀地分布于主动轮上,结合其到负重轮轴的距离,可以得出磁钢间的距离,再除以所用的时间,从而得到坦克的瞬时行驶速度。坦克瞬时行驶速度低于某一设定值即认为坦克处于短停状态,到再次运动为止的时间为此次短停时间。跃进距离由2次短停之间的时间乘以霍尔传感器读出的磁钢个数,再乘以磁钢间的距离计算得出。
4.1.2 计时软件设计
坦克计时功能主要是利用光电传感器接收坦克运行过程中的起始标杆和终止标杆的激光信号,触发单片机计时器开始计时和终止计时来实现,此时间为坦克在射击跑道上的用时。具体计时软件流程如图6所示。

图6 计时软件流程
4.2 系统上行通信协议
为了反映坦克行驶状况以及为考核提供数据,嵌入式系统需要实时向终端PC发送信息,上行通信协议如图7所示。
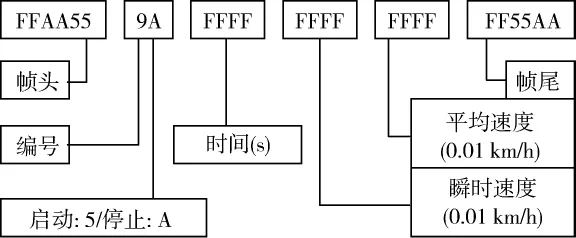
图7 嵌入式系统上行通信协议
通信数据包以0xFF后跟0xAA、0x55两个字节为帧头;以0xFF后跟0x55、0xAA两个字节为帧尾。这种形式在噪声中不易发生,因而接收协议只接收这种帧头和帧尾的数据包。通过发送协议嵌入式系统将坦克的编号、计时器启动与停止状况、计时时间、瞬时速度以及平均速度等信息发送到终端PC机上,作为乘员控制坦克和乘员之间配合熟练程度的成绩。
5 结论
以前坦克单车射击训练时只能使用秒表人工计时,即对坦克在射击跑道上的用时和短停时间进行手动计时。笔者设计的嵌入式坦克运动参数监测系统,可以在坦克行驶中实时监测坦克运行速度以及行驶时间、距离等运动参数,并通过无线通信的方式发送到考核终端,提供考核数据。系统使用简单,拆卸方便、灵活,在野外行车环境下可靠性高,能够不受强光照射、坦克行驶的扬尘、坦克电源电压波动大等恶劣因素的影响。目前,此考评系统已在坦克实弹射击训练中得到应用,解决了坦克实弹射击训练中的成绩综合评定问题,提高了射击训练的信息化水平。
[1]马潮,詹卫前,耿德根.ATmega8原理及应用手册[M].北京:清华大学出版社,2002.
[2]上海桑锐电子科技有限公司.SRWF-1028(V1.5)无线模型使用说明书[EB/OL].[2011-11-01].http:∥www.51sunray.com
[3]杨继生,刘芬.霍尔传感器A44E在车轮测速中的应用研究[J].电子测量技术,2009,32(10):100-102.
[4]路国庆,赵晓博,胡立强,等.脉冲检测方法的霍尔传感器在里程表中的应用[J].机械设计与制造,2009(1):87-88.
[5]丁芝琴.基于霍尔传感器的电机测速装置设计[J].农机化研究,2010(5):81-83.
