一种基于星体面积的星图分割方法
2012-09-25邓江生樊利恒古立莉
邓江生,樊利恒,古立莉
(1.海军航空仪器计量站 上海 200436;2.海军航空工程学院 控制工程系,山东 烟台 264001;3.中国人民解放军94748部队 江苏 南京 210008)
星图分割是一种重要的图像处理技术,它从本质上来说是一种图像分割,图像分割它不仅得到了人们广泛的重视和研究,也在实际中得到大量的应用。例如在工业自动化,在线产品检验,生产过程控制,文档图像处理,遥感和生物医学图像分析,保安监视,以及军事,农业工程等方面。图像分割技术的发展与许多其他学科和领域如数学、物理学、生理学、电子学、计算机科学等密切相关。
图像分割多年来一直得到人们的高度重视,至今己提出了上千种各种类型的分割算法。而且近年来每年都有上百篇有关研究报道发表。虽然图像分割方法较多,从图像处理的角度可分为3大类:阈值分割、基于边缘的分割和基于区域特性的分割[1]。
星图像分割是星图像处理的一个重要环节,分割的目的是将所需的星体目标从背景和其他较暗的星体中分离出来,实现对星体目标的提取,为星体的细分定位和星体的识别提供条件。目前的星图像分割算法大都是针对软件产生的星图或者太空中拍摄的星图,对于在海平面或大气层内拍摄的星图处理来说意义不大,这里将开发一种针对大气层内陆地上拍摄的星图的分割算法。
1 星图像的预处理
实验平台所采用成像器件为美国Apogee公司ALTA系列U6相机,该相机的主要参数如下:
1)靶面规格:1 024×1 024
2)像元大小:24×24 microns
3)动态范围:>87 dB
4)量子效率:72%
5)工作模式:全帧转移
6)应用外部触发信号,严格同步曝光触发信号
图1为由实验平台拍摄的图像,构成了本文处理的星图像。该图是一幅在晚上20时~22时拍摄的星图像,拍摄时避免了月亮对恒星目标观测的影响,同时为极大避免实验地点周围杂光的影响,拍摄星图时不采用跟踪模式采集图像,而是凝视天顶进行图像采集。
可以看出,原始图像的成像质量很差,图中不但有各种噪声和一些划痕,而且还有由于背景杂光和光阑设置而造成的不均匀背景,直接分割难度较大,需要对星图像进行预处理。经过形态学滤波预处理后得到一幅比较背景比较均匀且星体保持较好的图像,如图2所示[2]。

图1 原始星图图像图Fig.1 Original star image
从图2可以看出,星图像中星体面积很小,有很多星体只占有几个甚至只有一个像素,星图中星体的数目较多。星体目标的边缘特征不明显,而目标和背景在灰度上差别较大,可以考虑使用基于阈值的分割算法。星体在图像中更多的表现为孤立的小目标,区域特征并不明显。初步确定采用阈值分割算法。
图2 形态学预处理后的星图像Fig.2 Star image after morphology processing
2 阈值分割算法
常见的阈值分割方法有双峰法、迭代法和Otsu法[3-4]。
1)双峰法
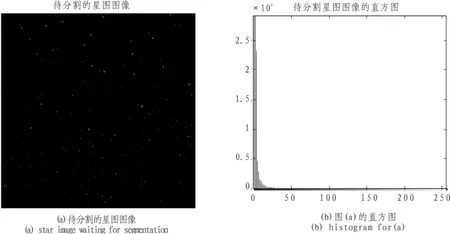
图3 待分割星图及其直方图Fig.3 Star image waiting for segmentation and its histogram
双峰法的原理很简单:它认为图像由前景和背景(不同的灰度级)组成,图像的灰度分布曲线可近似认为是由两个正态分布函数(μ1,σ21)和(μ2,σ22)叠加而成,图像的直方图将会出现两个分量的峰值。双峰之间的波谷就是图像的阈值。
2)迭代法
迭代法阈值选择算法是对双峰法的改进,它首先选择了一个近似阈值,将图像分割成2个部分:R1和R2,然后计算R1和 R2的均值 μ1+μ2, 并选择新的分割阈值 T=(μ1+μ2)/2,重复上述步骤直到μ1和μ2不再变化为止。
3)Otsu
Otsu方法是由Otsu于1979年提出的[5]。方差是灰度分布均匀性的一种度量,方差值越大,说明构成图像的两部分差别越大,当部分前景错分为背景或部分背景错分为前景时都会导致两部分类间方差变小,因此使类间方差最大的分割意味着错分概率最小。
由图3可以看出,星图直方图中低灰度部分占了绝大部分,高灰度部分占有像素数很少,高灰度区和低灰度区没有明显分界,不适合使用双峰法进行分割。
对迭代法和Otsu法进行仿真,实验结果如图4所示。从实验结果来看,2种分割方法都能将目标与背景成功分离。从图中可以看出,阈值分割后的星图中星的数目很多,但不同的恒星星点占有不同的像素数不同,且不同的星的亮度(灰度值)不同。
3 基于星体亮度的分割方法
实际上在星模式识别时只要保证星图中的星的数目不少于一定数量即可,过多的星反而会增加星模式识别的计算量[6]。这时,完全可以选择屏蔽信噪比低的星体,这些星体通常占有像素的数量较少且像素灰度较低。
通过分割后星图的三维灰度分布图(图5所示)可以发现,不同星体具有不同的高度,即具有不同的灰度值,且其灰度都高于背景灰度。因此,只要提高分割阈值就可以使星图中星的数目变少,且未被作为背景的星体具有较高的灰度。可以选择人为地提高分割阈值对星图像进行分割,但这样会出现一种弊端,例如分割后要保留的星的一部分边缘变为背景色,使得星体细化,即分割后有一部分属于星体的像素的灰度变为0,这将对亚像元细分定位的精度产生不利影响;分割后图像中星的数目不易确定。
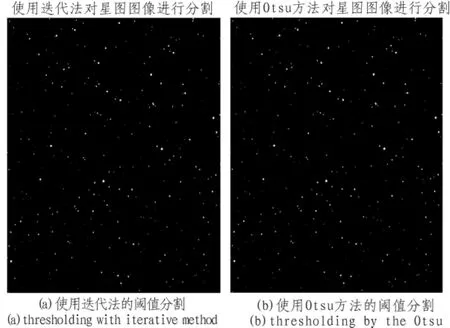
图4 全局阈值分割Fig.4 The outcome of global thresholding
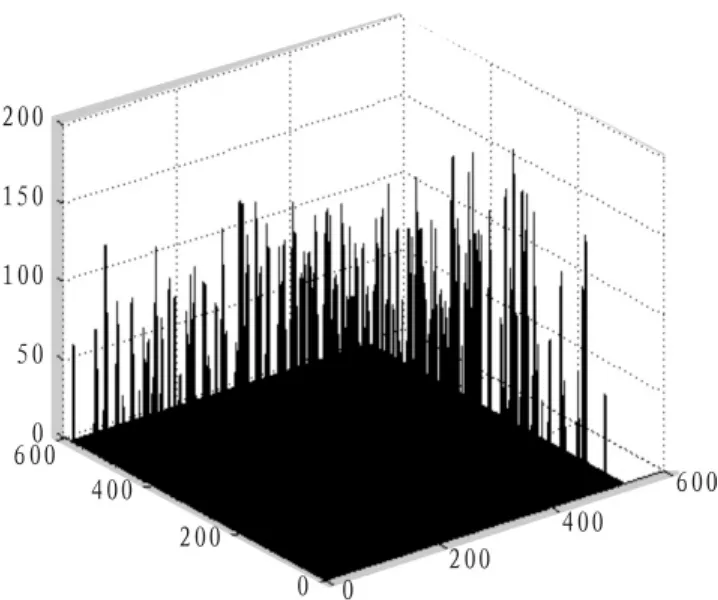
图5 分割后星图的三维灰度分布Fig.5 3-D gray distributing image of a segmented image
这时,研究开发一种新的星图分割算法显得尤其重要。这种算法首先应该能够将星体与背景分离,其次应保证星图中星的数目,最后还应保证星图中保留的星具有优良的性质。
统计直方图是通过遍历查询整幅图像,统计具有相同灰度值的像素个数,并以二维直方图来表示某于灰度值所对应的像素点个数的一种统计方法。可以采用直方图查询计数的方法来设定分割阈值。
直方图查询计数来设定分割阈值方法是根据预先设定的提取恒星星点的个数,按灰度值从大到小的顺序来查询直方图,统计大于当前灰度值的像素个数,当像素个数大于设置的恒星个数时,则取该时刻的灰度最小的星图的灰度值作为该幅星图的分割阈值,从而完成阈值的自行设置。然而如前面所述,提取的恒星数量多少直接关系到后续进行恒星星点的细分定位及伪星识别等所需要的运算量的大小及星图识别时的识别成功率等。兼顾上述星图处理运算量及后续识别成功率,目前从一幅星图中提取的恒星数大多控制在10颗左右[6]。将星图中灰度值最大的10个像素进行标记,如图6所示。可以看出星图中被标记的像素数为13个,大于10个,主要是因为这些每个像素值都不一定是由某一个像素独享,即存在灰度值相等的像素。由图6可以看出,一共有3颗恒星各有2个像素点被标记,即同一颗恒星星点被多次计数,因此在图7所显示的分割结果中,只能在分割后的星图像中看到10个星体。
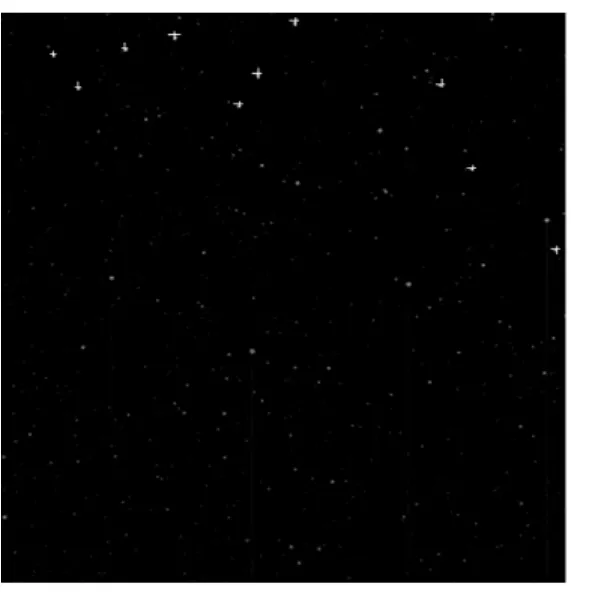
图6 最大灰度值标记Fig.6 Mark the biggest value

图7 分割结果图Fig.7 Outcome of segmentation
由于同一颗恒星星点被多次计数,从而造成实际提取的恒星星点数少于标定的最大值数的现象,这种现象可能造成后续亚像元定位计算时,对同一个恒星星点进行多次定位计算,增加无谓的运算量。此时可以考虑使用去邻域法解决这一现象,即对每一个恒星星点,只保留中心像素点,而去除其邻域内的其它像素点,实现去邻域处理,从而保证了每一个恒星星点,都只对应着一个灰度较大的像素点,可以使得在进行上述的分割计算时,每个恒星星点只被计数一次,避免了对同一恒星星点进行重复计数的现象。在提取出规定数目的恒星后,用在原图中查询的方法找到对应的属于星体的所有像素,即可得到最终的分割结果。
从使用去邻域方法得到的分割星图的三维分布图(如图8所示)可以看出,分割后星图中的星体具有“细高”的特征,即得到的星体具有较高的灰度值,但占有的像素数并不多。因此在这里提出一种基于星体面积的分割方法。
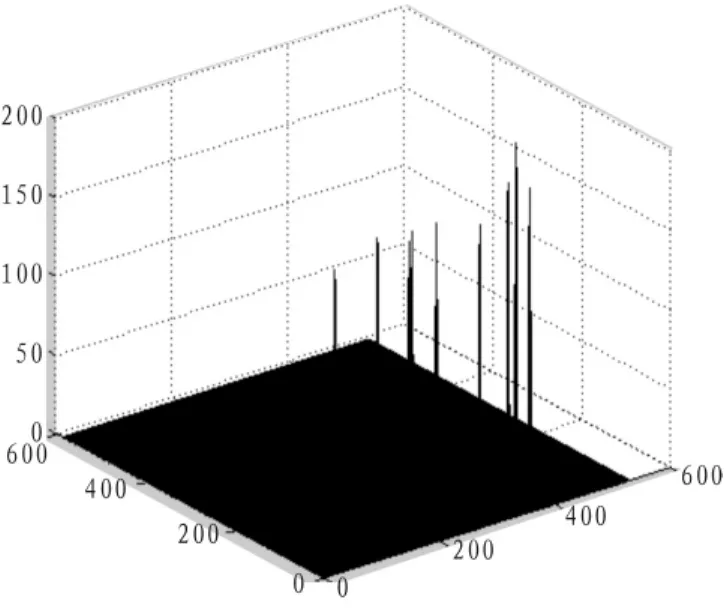
图8 分割后图像的三维灰度分布图Fig.8 3-D gray distributing image of Fig.7
4 基于星体面积分割方法的提出
实际上我们可以以星体占有的像素[7]数的多少作为一种分割依据。计算每一个星体占有的像素数的多少即星体的面积,然后将占有像素数最多的若干个星体分割出来。可以先使用Otsu方法对星图进行二值化处理,然后计算属于同一个星体的像素数,由于进行了二值化处理,因此可以用属于同一星体的所有像素的灰度和代替属于同一个星体的像素数。像素和大的星体占有的像素数多。在得出这些结果之后,只需将与这些星体无关的区域的灰度值设为0即可。
基于这一思想进行仿真,结果如图9和10所示。
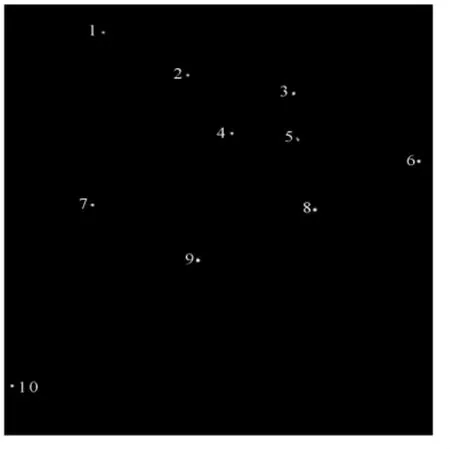
图9 基于星体面积的分割Fig.9 Segmentation based on the stars’area
通过基于星体面积的分割处理之后,图像中保留了一定数量的恒星星体,而且这些星体是星图中占有像素数最多的恒星星体。这既保证了星模式识别算法的可行性,又保证了亚像元细分定位的精度。由于该算法需要对每一个恒星星点的面积进行计算并进行比较,因为需要的运算量相对较大,该算法的运行速度相对来说较慢,但总体上来说可以减小识别时的运算量,并可以提高亚像元定位的精度,从而也就提高了识别的正确率。
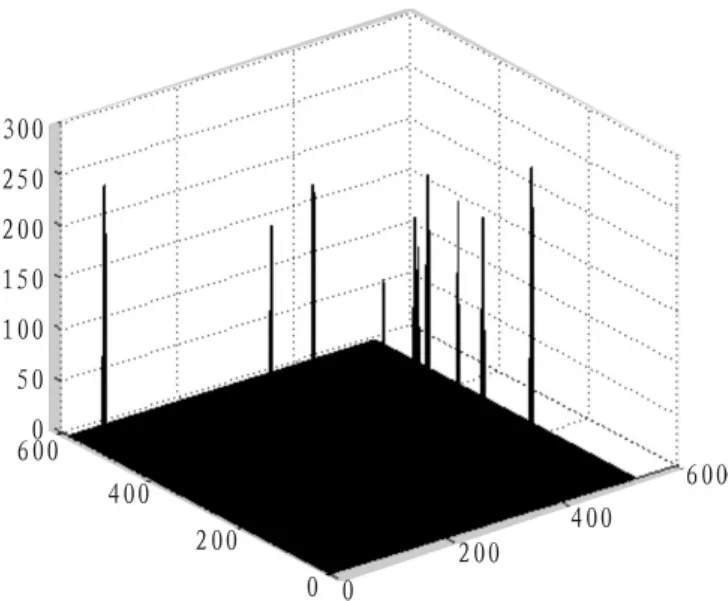
图10 分割后图像的三位灰度分布图Fig.10 3-D gray distributing image of Fig.9
5 结 论
本文在对星图像进行分析之后,提出了一种基于星体面积的分割方法,并通过仿真将其与阈值分割方法和基于星体灰度/亮度的分割方法进行比较,验证了基于星体面积分割方法的有效性和优越性。
[1]曹亮.基于Otsu理论的图像分割算法研究[D].武汉:武汉理工大学,2008.
[2]韩艳丽,樊利恒,翁璐.基于形态学运算的星图像分割[J].海军航空工程学院学报,2010,25(6):644-648.
HAN Yan-li,FAN Li-heng,WENG Lu. Star image segmentation based on morphology algorithm[J].Journal of Nnval Aeronautical and Astronautical University,2010,25(6):644-648.
[3]张德丰.MATLAB数字图像处理[M].北京:机械工业出版社,2008.
[4]Blartz W E,Gish S L.A connectionist classifier architecture appliedtoimagesegmentation[C]//Procofthe10thInternational Conference on Pattern Recognition,1990:272-277.
[5]Otsu N.A threshold selection method from gray-level histogram[J].IEEE Transactions on SMC,1979,9(1):62-66.
[6]徐侨荣.星图处理算法的初步研究及一体化组合导航的电路设计[D].杭州:浙江大学,2007.
[7]刘孟龙,吴伶锡.以辉光放电管为像素的电子黑板研究与实现[J].现代电子技术,2011(3):168-170.
LIU Meng-long,WU Ling-xi.Study and implementation of electronic blackboard taking glow discharge tube as picture element[J].Modern Electronics Technique,2011(3):168-170.