水声通信网的研究进展及其应用
2012-09-25朱永建徐鹏飞
朱永建, 徐鹏飞
0 引言
进入21世纪,在海事信息应用领域中,水声网络和水声通信技术取得了长足的进步。在水上,尤其是军事中情报的收集与监听,沿海的监测,以及水下侦察与多点探测、集群管理的调度和指挥等方面,水声网络通信技术不断显示出其重要性。目前,不断扩大的海洋监测范围和多样化发展的水下武器系统迫切需要能传得更快、更远的水声通信,用以准确有效地抵抗外部干扰[1-2]。各国军方打算,通过在水下建网,将潜艇与浮标、战机、舰艇、传感器、无人潜航器、等各种作战平台构成一体化网络。随着“网络中心战”概念的提出及发展,一种必然的发展方向就是深入到水下:一方面,海面以下的战场是现代化立体战争中的重点;另一方面,水下网络特通信技术的发展为其实现提供了有力条件。可以肯定,其将使水下立体作战产生天翻地覆的变化,也对各国海军的作战思想和装备建设产生重大的影响[3]。
1 水声通信技术
水下无线通信是水下网络的关键,它主要包括3类,分别是:根据它们不同的特性及应用场合,可分为水下电磁波通信、水下光通信和水声通信。水性地磁波通信虽受水文条件影响甚微,通信稳定,但传播衰减大;水下光通信的激光信号需要直线对准传输,且容易被水吸收,再加上水中的浮游生物和悬浮粒子将使其发生散射,同时水中的自然光还会对光信号进行干扰[4-5]。这两种通信方式均只适应短距离。
相较之下,在水中声波的衰减小得多是中长距离水下通信的最有效的手段。同时,水声通信信道是难度大的一种无线通信信道,具有以下显著的特点[1,6-7]:
(1)属于窄带通信,信号衰减严重
在海水中,声波传播的能量损失主要包括扩散、吸收损失。扩散损失近似与传输距离的平方成正比,主要由于波阵面的扩散引起声能的损失,在深海中,扩散损失表现为球状,而在浅海中,其表现为水平方向的柱状扩散。吸收损失与声波的频率成正比,频率越大,吸收损失越大。相对于无线信道,水下通信带宽要窄得多,传输距离在 1~10 km,带宽小于10 kHz;100~1 000 m,带宽约20~50 kHz。
(2)起伏效应严重
声波在海水中传播大约每1 000 m时延0.67 s,通信时延大。当海水是传输介质时,空间分布会变得不均匀,并产生随机的变化,所以水声信号也变得随机起伏,其传播速度随海水的压力(深度)、温度、盐度的变化而变化。由于信道的变化,脉冲响应会时变,这在很大程度上影响了通信系统的性能参数。
(3)多径效应严重
海面和海底的反射以及海水分层介质的折射都会对声波的传播进行干扰和影响,故在发收端之间形成多条不同路径的信道先后到达接收机[8]。多径传输的存在,且信道动态变化,使得在接收端信号幅度衰落、码间干扰[9]等,是造成水声信道数据传输速率低的主要原因。
(4)环境噪声大,误码率高
海洋中存在潮汐、湍流、海面波浪、风成噪声、行船及工业噪声等。由于海平面的波动、内波、海水背景噪音、信道多径传播等影响,使水声信道信号出现时断时续的不稳定现象,数据传送误码率高。
2 水声通信网的组成及其特点
20世纪90年代,美国率先提出“水声通信网”的概念。水声通信网主要由以下部分组成:浮标节点,在海底、海中的传感器节点(包括固定的节点和承载它的移动平台),以及存在于它们之间的双向连接链路。网络以分布式、多个节点的方式对水下的目标位置进行大面积覆盖,可以进行信息采集、分类、处理和压缩,并通过水下通信网节点以中继方式回传到陆地或船上的信息控制中心的综合系统[10]。其典型的组成示意如图1所示。
水声网络拓扑是水声网络的重要研究内容,拓扑结构决定了网络的路由方式、能量损耗、网络容量和可靠性。水声网络的体系结构,有多种分法[10-11]。从管理和访问控制功能角度,可将水声网络结构分为集中式、分布式和多跳式。
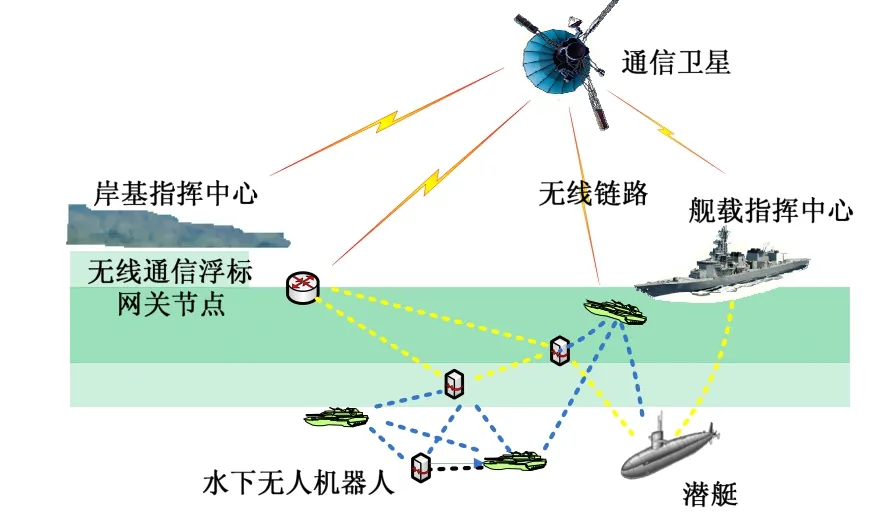
图1 典型的水声网络系统组成
水声通信网络是水声通信与现代网络技术的结合,与陆地或空中的无线通信网络相比,水声通信网络具有如下的特点:信道高度动态,网络相对脆弱,通信能力不足;依靠电池供电,持续工作时间有限。水声网络的以上特点,决定了目前水声网络无法规模化应用及长时间在水下工作。
3 研究进展
水声通信方面的研究主要包括水声传感与调制、水声信号处理方面的研究。在水声调制解调器方面,较典型的有英国Tritech公司的Micron Data Modem系列产品和澳大利亚DSPComm公司最新的AquaNetwork,其设备已初步具有组网功能,其微型调制解调器通信距离可达1 000 m,数据传输速率可达40 b/s。同时,为扩大海域监测范围,研究出水下传感器移动的方法,可以用水下滑翔机或自主式水下航行器(AUV)等水下可移动的设备作为载体,将水下节点安装于这些设备上,使之成为水下移动节点。Hydroid 公司研制生产的REMUS系列AUV,巡航速度为1.5~2.9 m/s,续航能力较好,能持续几十小时。
从上个世纪九十年代以来,水声通信技术的研究重心已由较低速的非相干FSK调制技术转变到高速相干通信技术。与非相干方式相比,相干水声通信的数据传输速率高得多,但收、发端的系统高复杂性严重制约了其实际使用。相干接收机研究的重点在于减小接收机算法的计算复杂度或提高均衡器的跟踪能力,最近水声通信新技术的研究,主要包括水下多载波调制技术、码分多址(CDMA)扩谱技术、空间分集技术、水下通信网络等,有望促进相干水声通信技术的应用进展。
国内该领域的研究已取得一定成果。厦门大学研制的语音通信机在厦门极浅海域进行了多次试验[2],其稳定通信距离在10 000 m左右,扩展通信距离可达到12 000 m;在水声图像传输方面也取得较好进展,在厦门港海试结果为:水平传输距离820 m时,传输速率1.5 kbit/s,不同海况下数据误码率均小于10-4。
水声通信网络是涉及多学科交叉的研究领域,关键技术[7,10]主要有网络协议、网络安全、时间同步、定位技术等。中国在水下传感器网络方面的研究起步较晚,研究的成果为:厦门大学参考国内外的水声通信网络模型,自主提出的一种水声网络拓扑结构[12];中科院自动化所研究的基于机器鱼的移动传感器网络实现环境监测方案;中科院声学所、中科院沈阳自动化所和西安光学精密机械所共同研制成功的水下反恐传感器网络监控系统;中国海洋大学在水下传感器网络和海洋立体监测网络领域展开了研究,研制了水面传感器网络并在海上进行了部署。
4 应用
各国海军均致力发展真正的水下作战平台之间的高效通信,以充分发挥其作战效能。水下作战网络模型组成为:在海底或海中的固定传感器节点、潜艇和水下潜航器,海面上的网关节点以及陆上的中继站。二十世纪九十年代初,美国就已经着手研究浅海和深海局域网,现阶段美国正在进行多个水下网络计划,如海网(Seaweb)、海鹰(Seaeagle)以及近海水下持续监视网络(PLUSNet)。
“海网”(Seaweb)是由美国研究局和空海战系统中心主持的历经十多年的重要研究项目,它通过水声通信链路,网络由固定节点、移动节点和网关节点连接组成,是现在相对成功的水声概念网络。自1998年起,美国海军平均每两年进行一次海底水声网络通信试验。在1998年试验中,Sesweb采用FDMA方式、树状形式的拓扑结构,将数据在源节点发送,经过4次水声中继和一次无线通信中继后,传送到岸站,这次试验表明:由分布式节点群组建的大范围广域水声网络是可行的。在2000年试验中采用了混合式 CDMA/TDMA的复用方式,增加了协议的控制功能,网络节点已达17个,节点的空间距离为1~5 km,通过浮标中的网关节点作为中继,潜艇在水深约122 m处,向岸上发送了包含图像、文字等信息在内的数据报文。在2004年的试验中,节点数增加到40个,试验进行了分布式拓扑结构及动态路由协议的验证。至今,Sesweb已具备了很强的网络自组能力,如节点位置定位(100 m量级)、自动节点识别、时钟同步(0.1~1.0秒量级)、自适应发射功率控制、节点更新和失效后的网络组等功能。
“海鹰”(Seaeagle) 于2004年由美国海军进行试验,是由海洋传感器、无人潜航器以及多媒体网关浮标组成,形成了能够穿越水面的网络。分布式传感器上装有远程声呐调制解调器,可以与锚定浮标进行传输数据。锚定浮标一般带有水声收发信机与调制解调器,将其作为网关浮标。同时,它与海洋传感器及水面无线电进行连通,使得水下数据可以穿过水面,从而实现水面与水下立体网络通信。
5 结语
水声通信网络能够提供隐蔽、持续以及高速的网络化数据通信手段[13-16],对潜艇的水下隐蔽通信方式和水下作战方式大有助益,将产生重大变革。现阶段,美国己初步建设了水下作战网络,这对中国水声通信网络的研究提出了迫切的需求。中国水声通信网络的研究近几年得到了一定的进展,但仍面临着许多问题和挑战。应加快中国水下通信网络的研发。
[1] 许肖梅.水声通信与水声网络的发展与应用[J].声学技术,2009,28(06):811-816.
[2] 程恩,袁飞.水声通信技术研究进展[J].厦门大学学报:自然科学版,2011,50(02):271-275.
[3] 蒋志忠,熊宗接.水下作战网络综述[J].指挥控制与仿真,2009,31(02):5-8.
[4] WIENER F, KARP S. The Role of Blue/Green Laser Systems in Strategic Submarine Communications[J].IEEE Trans on Communications, 1980, 28(09):1602-1607.
[5] HANSON F, RADIC S. High Bandwidth Underwater Optical Communication[J].Applied Optics, 2008(47):277-283.
[6] 梁涓.水下无线通信技术的现状与发展[J].中国新通信,2009 (12):67-71.
[7] 郭忠文,罗汉江.水下无线传感器网络的研究进展[J].计算机研究与发展,2010,47(03):377-389.
[8] 张仁和.负跃层浅海中信号波形的多途结构[J].海洋学报,1981,3(01):57-69.
[9] 许克平,许天增.基于水声的水下无线通信研究[J].厦门大学学报:自然科学版,2001,40(02):311-319.
[10] 魏昕,赵力.水声通信网综述[J].电路与系统学报,2009,14(06):96-104.
[11] 郑君杰,阮鲲.水声通信网络问题研究[J].电信科学,2009,(10):63-66.
[12] 王琦,胡晓毅.基于水声网络的FAMA协议仿真研究[J].厦门大学学报:自然科学版,2010,49(04):505-508.
[13] 许娟,胡荣林,金鹰.改进混沌调制技术的抗多径干扰性能研究[J]. 通信技术 ,2009,42(02):30-32.
[14] 张珍,黄瑞光,程贯中.扩频技术在水下声通信系统中的应用[J]. 通信技术 ,2002(11):7-9,15.
[15] 崔新瑞,张捷,张晶,等.OFDM系统原理及仿真实现[J].信息安全与通信保密,2007(12):68-69.
[16] 徐挺,杨林,马琳茹,李京鹏.跳端口技术在隐蔽通信中的应用研究[J]. 信息安全与通信保密,2006(08):125-127.