储能式电动操作机构的设计
2012-09-22毛海锋徐惠兴楼铭达
毛海锋 徐惠兴 楼铭达
(苏州未来电器有限公司,江苏 苏州 215144)
储能式电动操作机构是目前国际上普遍使用、技术上较为先进的电动操作机构,相对于电机驱动的电动操作机构,其主要优点是由储能机构的预储能来推动塑壳断路器的合闸具有快速合闸的特性,一般合闸时间小于 100ms,普通的电机驱动的电动操作机构合闸时间一般大于1000ms。
1 设计新一代的储能式电动操作机构要重点解决的关键技术问题是
1.1 储能电动操作装置的储能系统
传统的储能电动操作装置中的储能系统一般采用两种方式。
第一种,采用拉簧直接作用在与塑壳断路器手柄相抵接的滑块上,通过锁扣来储能和释放操作,目前西门子的储能电动操作装置采用该结构。这种储能系统要求弹簧压缩行程比较大,影响拉簧的寿命;由于拉簧拉住储能电动操作装置的滑块,滑块就无法随手柄移动,影响对储能电动操作装置的状态指示机构的设计。
第二种,用直列式压簧压缩储能往复运动的储能电动操作机构,目前施耐德、三菱的储能电动操作装置采用该结构。这种储能系统的压簧大致垂直地设置在储能电动操作装置中,使整个储能电动操作装置的结构复杂,成本也相对较贵。
我们现在设计了一种储能电动操作装置的储能系统(图1),包括:支撑座及其上的操作机构,减速机构,储能机构和释能机构。储能机构和释能机构使储能电动操作装置在储能和释能两种状态之间切换。储能机构包括凸轮和弹簧,凸轮设置在支撑座上并可以转动,凸轮上偏心设有轴,轴与设置在支撑座上的轴之间连接有弹簧,当储能电动操作装置处于储能状态时,两个轴处于近距离位置,弹簧呈压缩状态,当储能电动操作装置处于释能状态时,两个轴处于远距离位置,弹簧呈释放状态。
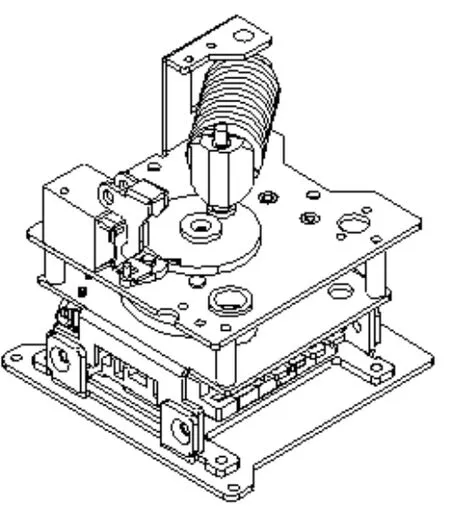
图1
1.2 带动手柄的滑块与储能机构的脱离结构
现有的储能电动操作机构的滑块通常与储能机构连在一起,滑块不能随塑壳断路器手柄自由滑动,导致无法实现通过由塑壳断路器的手柄来标识塑壳断路器三个不同的工作状态。尤其是当塑壳断路器从合闸状态切换到脱扣状态时,滑块必须随塑壳断路器手柄自由滑动,即滑块与储能机构之间应有一定的位移,目前现有的滑块传动机构都存在这样的技术问题。
为解决上述技术问题,我们设计了一种简单可靠的用于操作塑壳断路器手柄的滑块传动装置。包括:导柱和滑块,滑块沿导柱往复移动,滑块驱动塑壳断路器的手柄用以使塑壳断路器在合闸、分闸、脱扣3个状态之间切换。储能电动操作机构的主轴固定连接有一凸轮并带动凸轮转动,凸轮上偏心设置有一个滚轮,滚轮驱动滑块往复移动,且当塑壳断路器从合闸状态切换到脱扣状态时,滚轮与滑块之间有相对位移(图2)。
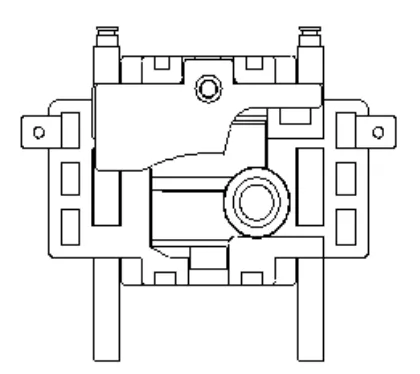
图2
该设计的有益效果主要体现在:通过由塑壳断路器的手柄状态实现了塑壳断路器3个不同的工作状态的表示,结构简单可靠。
1.3 解决电机冲击问题的离合器结构
当储能操作完成、机构需停止动作时,电机很难立即停下,其残余的动能会通过减速机构传递到与锁扣连接的凸轮机构,导致锁扣与凸轮摒死。要解决该问题,就要在电机和锁扣机构之间加一个离合装置,当储能完成、分闸到位时,电机和锁扣机构脱离。
目前,国内外同类储能式的电动操作装置的离合系统大多采用利用行星轮和棘轮组合系统来实现离合功能。采用利用行星轮系统来实现离合功能,通过主轴转动带动凸轮打击棘齿使母轮可以转动或锁定,从而使主动轮带动行星轮时使母轮空转或带动母盘一起转动,从而实现离合的功能。该结构制造复杂,成本高,所需占用空间大等缺点。
要解决上述技术问题,我们设计了一种结构简单可靠、成本较低的操作塑壳断路器的储能电动操作装置中的离合系统(图3、图4)。包括:支撑座1及设置在支撑座上的带引导作用的凸台的齿轮2,和异形齿轮配合的齿轮3固定在回转板4,以及使回转板4和固定在回转板4上的齿轮3回复到和齿轮2啮合作用的弹簧5。实现了齿轮2和3的自动离合。
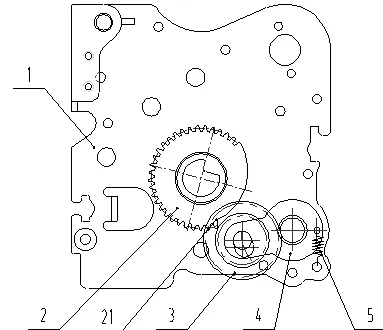
图3

图4
1.4 储能电动操作机构的互锁装置
现有的储能电动操作机构的互锁装置中只有“手动”和“电动”两个控制状态,整个互锁装置结构也较为复杂。例如中国专利 ZL99106331揭示了一种储能闭合式开关设备的联锁结构,包括螺旋压缩闭合弹簧,它通过摇臂连接于凸轮构件以保持弹簧纵向力,凸轮构件有加载凸轮,带有压缩闭合弹簧的加载轮廓,以及驱动凸轮构件以实现储能的可控释放,从而闭合设备触头的闭合轮廓,由弹簧偏压至非锁闭位置的闭合支座由弹键组件锁闭,将闭合弹簧固定在加载状态,弹键组件由与闭合支座分开的复位杆复位,闭合支座则在加载中由凸轮构件的转动复位。当触头闭合或起动跳闸松释时,联锁机构防止闭合弹簧松释。
为解决上述技术问题,我们设计了一种结构简单可靠的用于电动操作机构在不同操作状态下对操作起相应限定作用的互锁装置。通过以下技术方案来实现:一种储能电动操作机构的互锁装置,包括用于手动分合闸的分合闸按钮,用于手动储能的手柄,用于联通电动分合闸电路的微动开关,用于起到挂锁作用的锁板,还包括一个可往复运动的滑板,滑板分别在手动档、电动档、挂锁档3个位置间滑动,滑板上设有一组锁舌,锁舌分别与所述分合闸按钮、手柄、微动开关和锁板配接(图5)。

图5
2 结论
储能电操是一个系统的工程,除上述问题外还涉及其他的一些关键技术的解决和思考如①如何保证锁扣储能的可靠锁住和可靠释放;②驱动储能电操的电机力是普通电操的2~2.5倍,这样就涉及在规定空间中电机的选择和开关电源的设计;③由于每个操作循环的合闸操作都会由一定的冲击振动,如何来提高电操的机械寿命;④使储能电操更好的满足智能电网的配套需求。
