一种新的消防员定位方法
2012-09-21王守辉曾枭林郭建宏孟凡坤
王守辉 曾枭林 郭建宏 孟凡坤
信息工程大学信息工程学院,河南郑州 450001
一种新的消防员定位方法
王守辉 曾枭林 郭建宏 孟凡坤
信息工程大学信息工程学院,河南郑州 450001
随着定位技术的发展,消防员定位技术也越来越受到关注;由于已有的技术存在一些缺陷,无法满足实际需求,因此我们提出了一种新的消防员定位技术,它采用基于卡尔曼滤波的三维TDOA/AOA混合算法,定位精度较高,可以满足实际需求;最终对算法进行仿真,得出了一些重要结论。
消防;定位技术;卡尔曼滤波
引言
目前,火灾事件频发,而消防员的安全还得不到保障,消防员为抢救国家和人民的生命财产而英勇牺牲的事件屡有发生。据统计,在过去几年中,全国平均每年有二十多名消防官兵在灭火救援行动中因公殉职[1]。
随着定位技术的发展,国内外专家针对消防员火场定位技术进行了一系列研究,取得了很大进展,消防员的生命安全在一定程度上得到了保障。最为典型的是基于GPS和Zigbee的定位技术。
GPS技术是基于美国GPS卫星定位系统开发的,但是由于GPS信号难以穿透墙壁进行传播,所以GPS在室内定位精度很差,无法满足实际需求。现在国外大都采用基于Zigbee的预先布点现场定位技术[1],但由于这种技术需要预先布置节点,成本较高,不适合我国使用。
结合我国实际情况和现有技术的优缺点,我们提出了一种利用UWB信号的消防员定位技术。它通过测量消防员携带的信号源发出的UWB信号到达消防车上搭载的天线时的时间差和角度,采用TDOA/AOA混合算法,来计算出消防员的位置,以实现定位。由于测得的角度值误差较大,还需要用卡尔曼滤波器对测得的角度值进行滤波,以进一步提高测量精度。
1 技术实现
1.1 技术综述
这种定位技术只需利用信号发射源、天线、接收机等基础设备。具体原理如下:
消防员进入火场时携带一个简单信号发射源。由于火场环境恶劣,消防员可能忙于救援或已生命垂危,无法主动与外界联系,所以该信号发射源应每隔一段时间主动向外发射信号。
消防车上装有用于接收信号的天线,天线采用倒三角形[2],整个天线上布设有多个天线节点来接收信号,以实现定位功能,天线节点间距离已知。
天线接收到信号后,利用信号到达时间差和到达角度(使用卡尔曼滤波器进行优化),采用TDOA/AOA混合算法对消防员进行定位,天线的架构和优化算法对定位精度有很大影响。
1.2 信道模拟
大量实验数据表明在UWB中多径的到达呈现成簇到达的特性。常用的UWB信道模型有泊松模型、模型、模型和IEEE 802.15.3a模型,前两种模型为比较基础的超宽带小尺度信道模型,用的比较少,而IEEE 802.15.3a模型是修正的模型, IEEE 802.15.3工作组的信道模型子委员会将修正的模型作为超宽带信道的推荐模型,该模型应用范围广,实用性强。针对本项目的火场实际情况,我们采用IEEE 802.15.3a模型作为本项目信道模型。
簇到达时间的分布和束到达时间分布为

1.3 卡尔曼滤波
卡尔曼滤波器是一种时域上的滤波器,可以使估计均方误差最小。它是一种递归估计,即只要获知上一时刻状态的估计值以及当前状态的观测值就可以计算出当前状态的估计值。
在测角中,由于消防员的移动速度较慢,可以认为其远小于系统的采样速率,则模型可以看作是线性的。
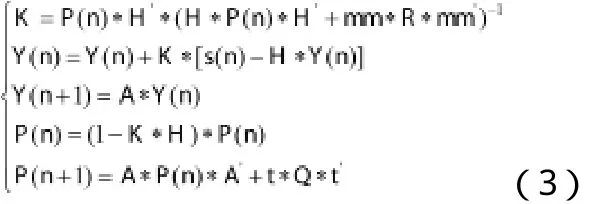
我们利用卡尔曼滤波器的五个基本公式就可以得到其在角度滤波中的公式:
1.4 三维TDOA/AOA算法
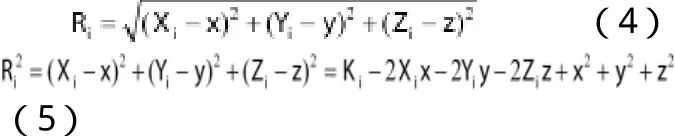
文献[3]讨论了二维的TDOA/AOA算法,这里我们由实际出发,研究三维的TDOA/AOA算法。设个天线节点分布在三维空间上,为目标点的坐标,为第 个节点的已知位置,主节点为。则目标点与第个节点的距离为:

令(5)式中为1可得:

由于主节点在原点,因此将(7)式带入(8)式可得:


根据AOA测量值 可建立方程:

可得到矩阵:
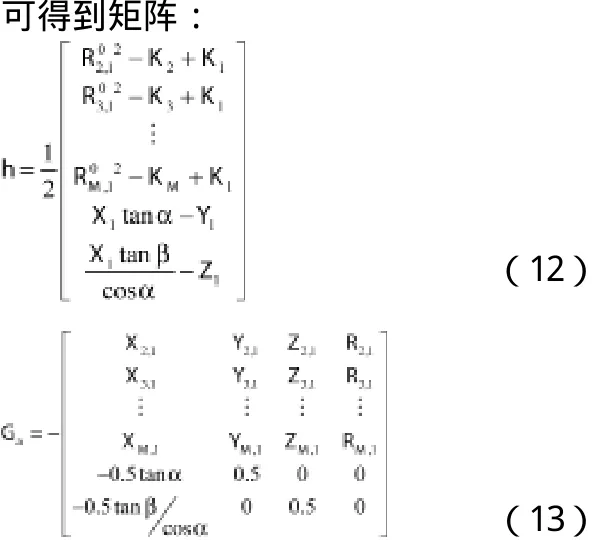
其中 为方位角, 为俯仰角。可得噪声的误差矢量为:


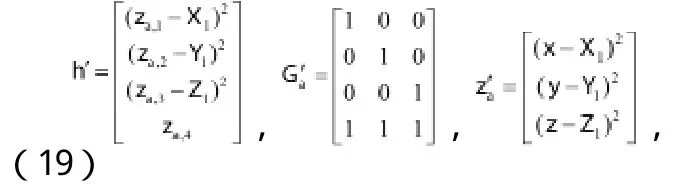
采用加权最小二乘(WLS)算法,用TDOA和AOA测量值的联合协方差矩阵Q近似替代误差矢量的协方差矩阵可得;其中由于是未知的所以还不能解出,所以我们还需进一步的做近似。令。则可得到该式的近似:


计算得到:

其中:
最终目标点的计算位置为:

2 改进的混合算法仿真结果与分析
当消防员的坐标为,天线节点数为7,天线节点间距离为5m时仿真得到下面的结果:
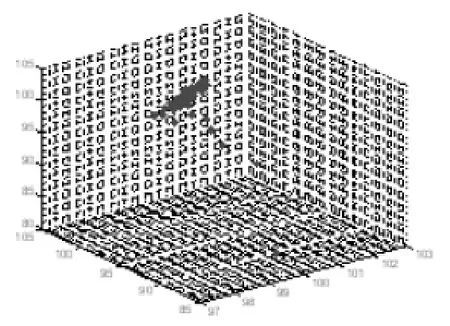
图1 定位整体效果图
由图1可知,由于信道内各种噪声的干扰,使得最后定出的消防员的位置在小范围内波动。在卡尔曼滤波器中设置的目标坐标初始值为0,因此定位有个快速收敛阶段。
2.1 天线节点数对定位精度的影响
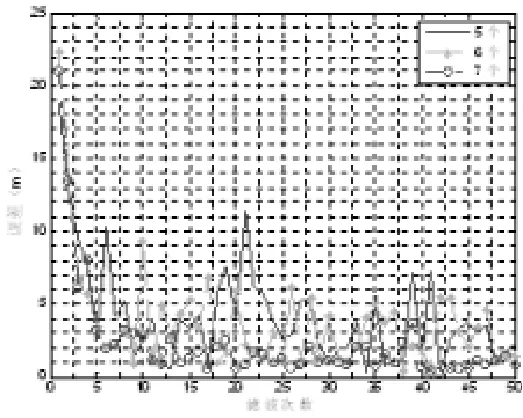
图2 天线节点数不同时的误差曲线图
从图2可以看出,当天线节点数为5时,平均定位误差约为4m,且波动比较大;当天线节点数为6时,平均定位误差约为2m,波动较小;当天线节点数为7时,平均定位误差为1.5m。天线节点数越多,定位精度越高,但是当节点数目达到一定时,节点数目的增加对精度的改善效果不明显,而且随着天线节点数的增多,设备也越来越复杂。由于本项目对定位精度要求较高,采用7个天线节点为宜。
2.2 目标与天线间距离对定位精度的影响
当天线节点数为7,天线节点间距离为5m,消防员和天线之间距离不同时仿真得到下面结果:
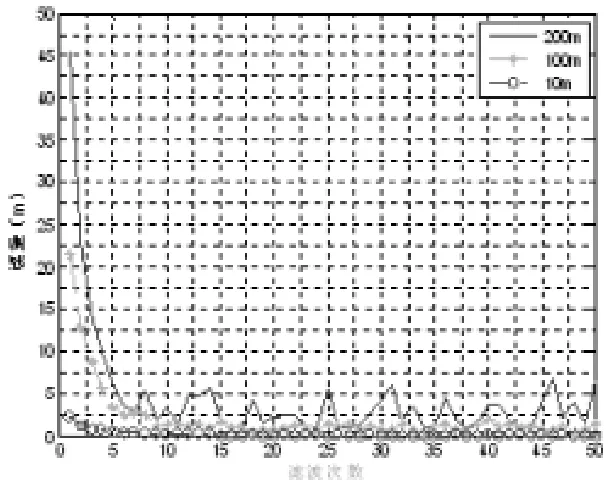
图3 定位范围不同时的误差曲线图
从图3可以看出:当消防员距离天线二百米时,平均定位误差约为3m,且波动比较大;当消防员距离天线一百米时,平均定位误差约为1.5m,波动较小;当消防员距离天线10m时,基本无定位误差。因此可以得出:当消防员与天线节点之间的距离越大,定位误差越大,且波动越大,这是由于当消防员距离较远时,在火场这种环境下,受到的干扰较大,且信号强度减弱,因此此种技术有一定的应用范围,要求定位范围小于200m。
2.3 俯仰角、方位角对定位精度的影响
当天线节点数为7,天线节点间距离为5m,距离100m,方位角为45度,俯仰角不同时仿真得到下面结果:
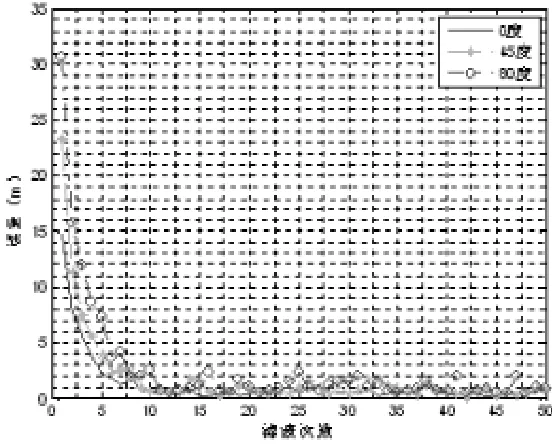
图4 俯仰角不同时的误差曲线图
从图4可以看出:当俯仰角在0~80度范围内变化时,定位误差变化只有细微差别;但仍可以看出随着俯仰角的增大,误差曲线波动增大,定位误差也增大。
当天线节点数为7,天线节点间距离为5m,距离为100m,俯仰角为45度,方位角不同时仿真得到下面结果:
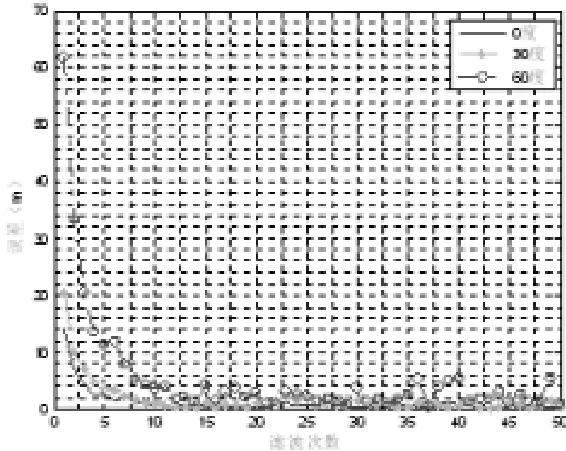
图5 方位角不同时的误差曲线图
经过仿真发现,当方位角为60度时,平均定位误差约为2.5m,且波动很大;当方位角为30度时,平均定位误差约为1.5m,波动较小;当方位角为0度时,定位误差为0.5m。可以得出:随着方位角变大,定位误差变大,所以天线应正对着火场。
3 结语
在本文中,为了能够适合火场恶劣环境的定位需求,我们采用了TDOA/AOA混合算法,同时利用目标位置的角度和时间参量,减少了定位误差,提高了定位精度。与此同时,我们利用卡尔曼滤波对得到的角度值进行滤波,得到更加精确的角度值,进一步提高了定位精度。最后通过仿真得到了一些有实际意义的结论。
[1]宋娜娜,胡斌.灾害现场遇险消防员定位技术研究现状[J].公安部上海消防研究所,2009.[2]王永诚,张令坤.多站时差定位技术研究[J].现代雷达,2003,2(25):1-4.
[3]于进刚,卢爱华.UWB信道模型简介[J].西安邮电学院学报,2006,11(1):29-32.
10.3969/j.issn.1001-8972.2012.20.092
