电动客车用无刷直流电机控制系统仿真分析
2012-09-19牛晓玲
牛晓玲
(西安铁路职业技术学院 陕西 西安 710014)
随着电力电子技术的迅速发展,无刷直流电机在电动汽车领域具有很好的应用前景[1]。目前,在研究无刷直流电机驱动纯电动汽车时出现了很多建模方法。文献[2]将无刷直流电机应用于电动汽车驱动系统,同时对无刷直流电机驱动电动汽车进行转速-电流双闭环控制系统仿真分析,通过仿真验证,该控制策略可以改善了无刷直流电机的机械性能,但文中没有融入电动汽车行驶车速。
文献[3]通过给出无刷直流电机和电动汽车动力学数学模型,并利用传递函数建立了车速-电流双闭环控制系统,同时通过仿真验证该控制方法可获得良好的控制效果,但在文中没有对纯电动汽车在各某档位下的动、静态特性进行分析。文献[4]通过给出无刷直流电机驱动纯电动汽车的数学模型,实现了机(汽车)与电(电机)的有机结合,设计了车速电流双闭环控制策略,但在对无刷直流电机进行建模时没有考虑到过流、欠压和缺相等故障的保护。文献[5]给出飞机用无刷直流电机的数学模型,并在Matlab2010a的Simulink环境下,采用S函数和模块化建模方法,建立了相应的系统仿真模型,同时比较详细地讨论了过流、欠压和缺相故障的保护。
在此基础上,在Matlab7.0/Simulink环境下结合S-函数和模块化建模方法,建立了带有故障保护的无刷直流电机驱动纯电动客车的车速闭环控制系统模型,并根据纯电动客车的使用需求,对其静、动态性能进行了验证。仿真结果表明,车速闭环调速策略具有超调小、响应速度快、鲁棒性好、自适应能力强等优点,同时验证了带有故障保护功能模型的合理、有效性。
1 无刷直流电机(BLDCM)的数学模型
本文以无刷直流电机的两相导通星型三相六状态为例,分析其数学模型及电磁转矩特性。为了分析方便,假设磁路不饱和,不计涡流和磁滞损耗,三相绕组完全对称。因此,根据BLDCM特性,可建立其端电压、转矩、状态方程及其等效电路。
BLDCM的三相定子电压平衡方程为[6-7]:
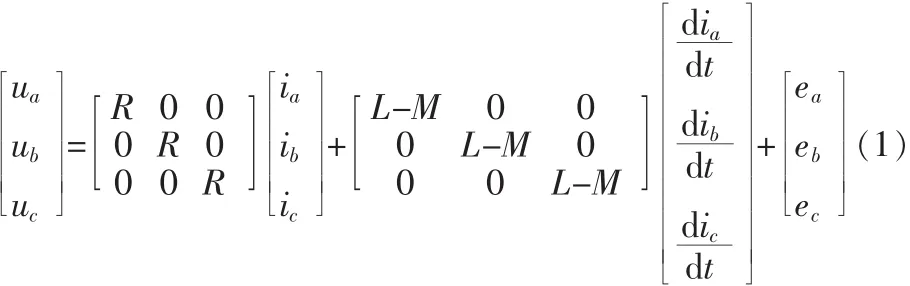
式(1)中:ua、ub、uc为定子相绕组电压(V);ia、ib、ic为定子相绕组电流(A);ea、eb、ec为定子相绕组感应电动势;L 为每相绕组的自感(H);M为每两相绕组间的互感(H)。
BLDCM 的 运 动 学 方 程 为[8-9]:

式(2,中:TL为负载转矩(N·m);J为电机转子转动惯量(kg·m2);B 为阻尼系数 (N·m·s/rad),Te为电磁转矩;ω 为电机机械角速度,Te=(eaia+ebib+ecic)/ω。
2 纯电动客车数学模型
电动客车行驶时,驱动轮在不打滑的情况下,地面对驱动轮的反作用力称为电动客车的驱动力[10]。

式(3)中,Tt为作用于驱动轮上的转矩,r为车轮的半径。
若用Te表示无刷直流电机转轴输出转矩,ig表示变速器的传动比,io表示主减速器的传动比,ηT表示传动系统的效率,则无刷直流电机轴输出转矩Te传递到驱动轮上的转矩的关系如下所示:

电动客车的行驶方程式为[10]:

电动客车行驶时,车速与电机输出转速的关系为[10]:

式(6)中:n为电机转速,单位为 r/min;r为车轮半径,单位为m;V为车速;io为主传动比;ig为变速器的速比。
3 基于MATLAB的无刷直流电机模块建立
3.1 无刷直流电机系统模型
该无刷直流电动机系统由电机本体、转子位置传感器、控制器和电压逆变器几部分构成,用Matlab对无刷直流电机进行建模时主要包括电机本体、转子位置传感器、控制器、电压逆变器、故障保护模块和逻辑换相模块,如图1所示。

图1 无刷直流电机系统仿真模型Fig.1 Simulation model of brushless DC motor system
根据(1)式BLDCM的三相定子电压平衡方程,可以得到电压平衡方程等效模型[11],根据BLDCM的电磁转矩可以建立转矩计算模块,根据BLDCM的运动学方程式可以得到转速信号、位置信号及其电机的旋转角速度信号如图2所示[7]。
反电势模块及转子位置传感器模块通过S函数来实现,根据BLDCM的转子位置将运行周期分为6个阶段[6]:0~π/3,π/3~2π/3,2π/3~π,π~4π/3,4π/3~5π/3,5π/3~2π。 因此,反电势及转子位置传感器S-function为:
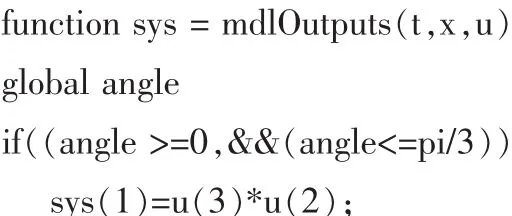
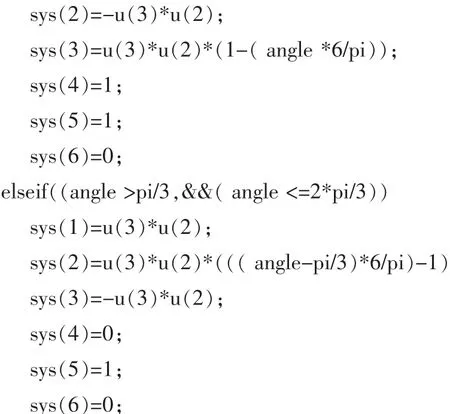
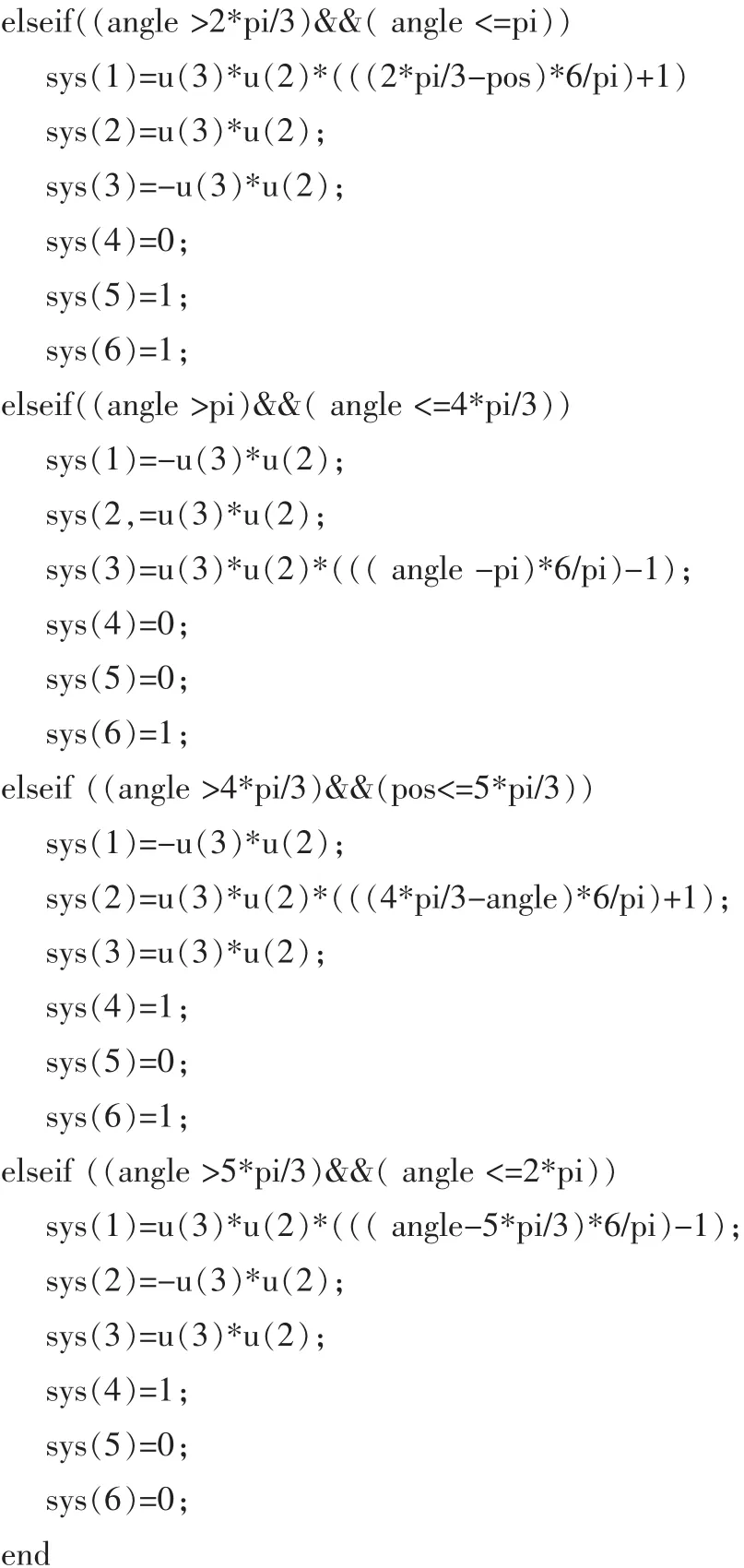

图2 无刷直流电机系统仿真子模型Fig.2 Sub-modelofsimulationmodelofthebrushlessDCmotorsystem
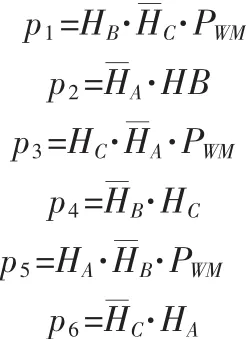
逻辑换相模块的作用是将转子位置传感器传来的霍尔信号HA、HB、HC,结合控制模块输出的 PWM信号,转变为相应的控制脉冲Q1~Q6,控制逆变模块中6只开关管按特定规律导通,以产生相应的三相交流电压供给电机本体。它们的逻辑转换关系为[5]:
故障保护模块包括无刷直流电机过流、欠压及霍尔传感器缺相等故障。无刷直流电机工作时,只要出现过流、欠压或者缺相3种故障中的一种或几种,保护信号就会置零,与后级的PWM波信号相与,封锁PWM信号,从而使电机停转,故障保护模块如图3所示。
3.2 纯电动客车整车模型
通过式(4)、(5)可以得到纯电动客车整车模型如图4所示。
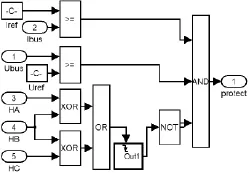
图3 故障保护模块Fig.3 Fault protection module
根据纯电动客车部分参数及式(6),可以得到无刷直流电机驱动纯电动客车驱动系统模型如图5所示。
3.3 无刷直流电机驱动纯电动客车系统模型
本文在MATLAB7.0/Simulink环境下建立了带有故障保护功能的无刷直流电机驱动纯电动客车控制系统仿真模型如图6所示。
4 仿真结果分析
在进行无刷直流电机驱动纯电动客车仿真分析时,BLDCM电机参数设置为:定子相绕组电阻R=1.5 Ω,定子相绕组自感 L=0.03 H,互感 M=-0.005 5H,转动惯量 J=0.015 kg·m2,极对数 p=2,阻尼系数 B=0.000 15 N·m·s/rad,每相反电势系数k=0.02,270 V直流电源供电。仿真时,所采用的试验车辆是由某客车改装而成,其主要参数为:主传动比i0=6.17,车辆重量为 M=3 050 kg、变速器传动比 ig为:5.568(1 档)、2.832(2档)、1.634(3 档)、1.000(4 档)、0.816(5 档)、轮胎半径 r=0.736 m、机械效率ηT=0.9。

图4 纯电动客车整车模型Fig.4 Pure electric vehicle model
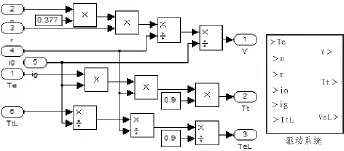
图5 无刷直流电机驱动纯电动客车驱动系统模型Fig.5 Systems model of brushless DC motor drive pure electric bus
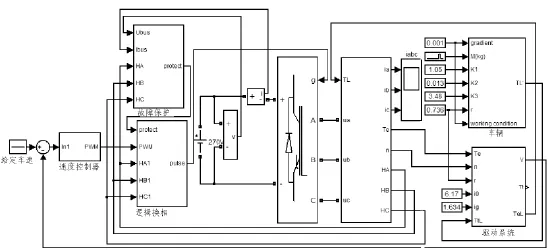
图6 无刷直流电机驱动纯电动客车整车仿真模型Fig.6 Whole simulation model of brushless DC motor drive pure electric power bus
为了验证所设计的带有故障保护功能的BLDCM驱动纯电动客车控制系统模型的动、静态性能,设定BLDCM允许最大电流为50 A,以纯电动客车3档位为例,设置目标车速为15 km/h,待系统进入稳态后,在t=1 s处突加负载质量M=800 kg,并在t=1.5 s时突然撤去负载。可以得到该系统中纯电动客车车速、无刷直流电机转矩、无刷直流电机转速、无刷直流电机单相电流、三相反电势转矩仿真曲线。
通过上述仿真波形可以看出,纯电动客车在给定的车速下,设定BLDCM的最大通过电流为50 A,通过仿真可以得到纯电动客车系统整体响应快速平稳,相电流与反电势波形与理论分析一致。同时对各故障保护功能均进行了仿真验证,证明了本文所建立的带有故障保护功能的纯电动客车用无刷直流电动机仿真模型的有效性。当突加负载时,无刷直流电机转速、纯电动客车车速发生突降,但能马上恢复到平衡状态,但能马上恢复到平衡状态,稳态运行时无静差,具有较强的鲁棒性和抗干扰能力。
5 结 论
本文在分析无刷直流电机、纯电动客车数学模型的基础上,在Matlab7.0/Simulink环境下结合S-函数,建立了带有故障保护功能的无刷直流电机驱动纯电动客车的控制系统模型,并对控制策略进行了静、动态性能仿真验证。仿真结果表明:该控制系统鲁棒性好、自适应能力强,同时验证了带有故障保护功能模型的有效性,为无刷直流电机驱动纯电动客车系统仿真提供了新的方法。
[1]陈清泉,孙逢春,祝嘉光.现代电动汽车技术[M].北京:北京理工大学出版社,2002.
[2]卫国爱,全书海,朱忠尼.电动汽车驱动用无刷直流电动机的控制与仿真[J].电机与控制应用,2009,36(1):16-19,31.
WEI Guo-ai,QUAN Shu-hai,ZHU Zhong-ni.Simulation and control of brushless DC motor in electric vehicle drives[J].Electric Machines& Control Application,2009,36 (1):16-19,31.
[3]汪贵平,马建,杨盼盼,等.电动汽车起步加速过程的动力学建模与仿真 [J].长安大学学报:自然科学版,2009,29(6):98-102.
WANG Gui-ping,MA Jian,YANG Pan-pan,et al.Dynamic modeling and simulation of starting and acceleration for electric vehicle[J].Journal of Chang’an University:Natural Science Edition,2009,29(6):98-102.
[4]张亚军.双能量源纯电动汽车驱动与再生制动控制策略研究[D].西安:长安大学,2011.
[5]马银龙,尹航,柯栋梁.飞机用无刷直流电动机系统仿真分析[J].微特电机, 2011(9):10-12, 33.
MA Yin-long,YI Hang,KE Dong-liang.Simulation analysis of brushless DC motors for aircraft[J].Small& Special Electrical Machines,2011(9):10-12,33.
[6]Xiao X,Li Y,Zhang M,et al.A novel control strategy for brushless DC motor drive with low torque ripples[J].IEEE,2005(5):1660-1664.
[7]纪志成,沈艳霞,姜建国.基于Matlab无刷直流电机系统仿真建模的新方法[J].系统仿真学报,2003,15(12):1745-1749.
JI Zhi-cheng,SHEN Yan-xia,JIANG Jian-guo.A novel method for modeling and simulation of BLDC system based on matlab[J].Journal of System Simulation,2003,15(12):1745-1749.
[8]Bharatkar S S,Yanamshetti R,Chatterjee D,et al.Reduction of commutation torque ripple in a brushless DC motor drive[C]//IEEE International Conference on Power and Energy,2008(8):289-294.
[9]王永益,庞全,王家军.基于网络的无刷直流电动机控制系统的研究[J].微特电机,2009(1):42-43.
WANG Yong-yi,PANG Quan,WANG Jia-jun.Research of brushless DC motor control system based on network[J].Small&Special Electrical Machines,2009(1):42-43.
[10]余志生.汽车理论[M].5版.北京:机械工业出版社,2009.
[11]齐蓉,周素莹,林辉,等.无刷直流电机PWM调制方式与转矩脉动关系研究[J].微电机,2006,39(1):58-61.
QIRong,ZHOU Su-ying,LIN Hui,etal.The relation between torque ripples and PWM modes of brushless DC motor[J].Micro Motors,2006,39(1):58-61.
