三维激光扫描仪分辨率的测试方法
2012-09-19刘桂昌
陈 涛 刘桂昌 张 倩 魏 朗
(长安大学汽车学院交通部汽车运输安全保障技术重点实验室,陕西 西安 710064)
0 引言
目前,便携式三维扫描仪的应用非常广泛,主要用于逆向工程、实物拍摄、创建产品的三维模型和有限元分析的数据捕捉等。这些领域对三维扫描仪的数据精度和分辨率精度都有很高的要求,因此,在选用扫描仪时必须确认其精度和分辨率,才能获得满意的三维数据模型[1]。
随着扫描仪技术的日趋成熟,尚缺少与便携式激光扫描仪分辨率指标相关的国际或国家标准出台。国内外对分辨率的研究主要倾向于对分辨率影响因素的研究。如通过对比不同种类扫描仪测试结果来分辨扫描仪分辨率优劣[2],分析扫描仪扫描距离和角度对扫描仪分辨率的影响[3-4],以及利用计算公式来计算一定面积上点云的密度与扫描仪分辨率间的关系[5]。但通过研究扫描仪分辨率的影响因素,仍不能给出一个简单、直观、可操作的仪器使用判别方法。本文在进行大量试验的基础上,借助科学的统计方法,给出了一种可行的方案。
1 测试方法
1.1 三维扫描仪的结构原理
便携式的激光扫描仪扫描系统主要由扫描仪、控制器和电源供应系统三部分组成。激光扫描仪本身主要包括激光测距系统和激光扫描系统,同时,也集成了CCD以及仪器内部控制和校正等系统[6]。
三维激光扫描仪所采用的最基本的方法有飞行时间法(time of flying,ToF)和三角测量法。飞行时间法利用激光发射到接收之间的时间延迟来计算距离。但由于光波的飞行速度达3×108m/s,为达到较高的距离测量精度,对于定时系统的时间分辨率有特别高的要求,较难在技术上得到实现。三角测量法则以传统的三角测量为基础。由于三维面型对结构照明光束产生的空间调制改变了成像光束的角度,即改变了成像光点在接收装置阵列上的位置,因此通过对成像光点位置以及系统光路的几何参数的确定,可最终计算出扫描对象与激光发射器的距离[7]。因此,近年来激光三维技术的发展主要在于三角测量法的更新。
单独的三角测量方式要求投影光轴和成像光轴之间保持恒定的夹角,且必须附加一维或二维的相对扫描来获取目标点的三维数据。Handyscan EXAscan等扫描仪大多采用双三角测量方式来解决单三角测量系统带来的弊端。
三维扫描仪的原理图如图1所示[8-10]。利用三角形边与角的特定关系,可以计算出目标点的三维坐标。
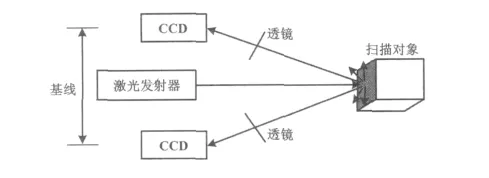
图1 三维扫描仪的原理图Fig.1 Principle of the 3D scanner
1.2 测试技巧
分辨率是一个笼统的概念,泛指测量或显示系统对目标物细节的分辨能力,较高的分辨率可以更好地体现目标物的细节。
在不同的领域,分辨率的标准也不同。通常情况下,分辨率指每英寸(1英寸=25.4mm)上可产生的点数或像素点数,即每英寸点(dots per inch,DPI)。对于光学设备,特别是三维扫描仪设备,分辨率就是对细节分辨能力的一种度量,即扫描仪能够区分的最小特征参数,也是描述点云中目标细微程度的指标[5]。
与平面输入输出设备的数据不同,三维扫描的数据属于矢量化的数据,尽管文献[5]中提出使用点云密度的方法来衡量分辨率,但实际操作起来还是具有一定的难度。在此,取相邻点与点之间的空间距离作为扫描仪的分辨率的指标。
鉴定扫描仪分辨率的最重要的工作就是数据的处理工作。当三维扫描仪工作时,CCD摄像头拾取扫描对象的过程即拍照的过程。依据其工作原理,在选取样本时,通常要考虑选取点云分布近似经纬方向的最近的两点之间的空间距离,而对于对角方向的距离则不予考虑。由于点云的数据量庞大,无法逐一检查,因此通常采用随机抽样的方式。
手持式三维激光扫描仪的分辨率的鉴定流程如下。
①连接扫描仪至计算机,做好扫描的前期工作。
②获取测试数据。分辨率等级受制于容积框的大小,一定的容积框大小又有三个分辨率级别可选,由低到高依次是L、M、H三个等级。在此基础上,还有高倍镜模式(如L+、M+、H+),就是在原有的扫描模式下将分辨率水平提高4倍。将容积框的大小设定为最小(最小只能到100 mm),在分辨率级别最高的情况下,名义最高分辨率可达0.20 mm,开高倍镜则最高分辨率可达0.05 mm。
③ 导入扫描数据至Geomagic Qualify,获取样本。对于大数量的母体,要估计母体置信区间,通常选取大子样作为样本。根据实际经验,一般认为n≥45的子样是大子样。
④建立分析模型,处理样本数据。
⑤根据分析结果生成分辨率数据模型,判定分辨率水平。
2 测试试验
加拿大Creaform公司生产的Handyscan EXAscan高精度系列扫描仪是一种高精度的手持式自定位三维激光扫描仪。它在两个普通的CCD镜头的基础上又增加了一个CCD镜头,使扫描仪的最大分辨率在原来的基础上增加了4倍,这极大地丰富了被扫描对象的细节。
Handyscan 3D扫描仪采用的是自定位模式。在扫描过程中,扫描仪会实时捕捉目标点,进而计算和记录其各自相对于扫描仪的位置。这些目标点会对扫描物体进行定位,定位后即可通过Handyscan 3D扫描仪采集物体表面的三维尺寸数据。
Handyscan 3D扫描仪的定位原理是利用不在同一直线上的四个点来确定一个三维坐标系,这样在扫描前或扫描过程中,扫描仪只要能同时捕捉到合适的四个点,就能确定这四个点所组成的坐标系区域采样点的坐标值。而所有的定位点又互有联系,故所有的小坐标系就可以统一成一个拥有共同坐标系的空间,采样点的坐标也会随之转化为公共坐标的坐标值。因此,采集信息之前需要对目标进行贴点标记。这种扫描特性的优点在于被扫描物体可以是运动的、空间位置是自由的。
测试Handyscan扫描仪的分辨率等级,必要时需要开启第三个CCD镜头,这对于计算机硬件配置有很高的要求。本次试验使用的是HP Z800图形工作站。工作站的主要配置为:2个英特尔至强四核处理器X5570、12 GB内存(DDR3-1333 MHE ECC)和3D NVIDIA Quadro FX5800专业显卡。
扫描仪的扫描对象是标准块。打开VXSCAN扫描软件(仪器自带驱动程序)设定面细节。设定内容包括设定容积框的大小和分辨率的级别。扫描试验获取的样本数据涵盖了容积框边长分别为100 mm、300 mm、500 mm、700 mm、900 mm、1 000 mm 在 L、M、H和H+四种等级模式下的扫描数据。
3 结果分析
Geomagic Qualify通过德国标准计量机构PTB(Physikalisch-Technische Bundesanstalt)认证,可以迅速检测产品的计算机辅助设计(CAD)模型和制造的产品之间的差异。凭借Geomagic Qualify提供的高级分析功能,可快速判断出扫描仪的分辨率状况,为处理扫描数据提供理想的工作平台。
影响扫描精度的因素有很多,影响分辨率的因素也同样很多,包括被扫描物的反光、扫描距离、温度及对象颜色等[2,11-12]。
为减少外界干扰因素对测试结果的影响,应尽量在点云分布较均匀的部位选取样本。同时,为了区分对平面和曲面细节的提取能力,分别对样本进行选取;样本容量维持45。
样本数据均值汇总表如表1所示,分辨率等级包含低(L)、中(M)、高(H)和高等级开启高倍镜(H+)这四个等级。
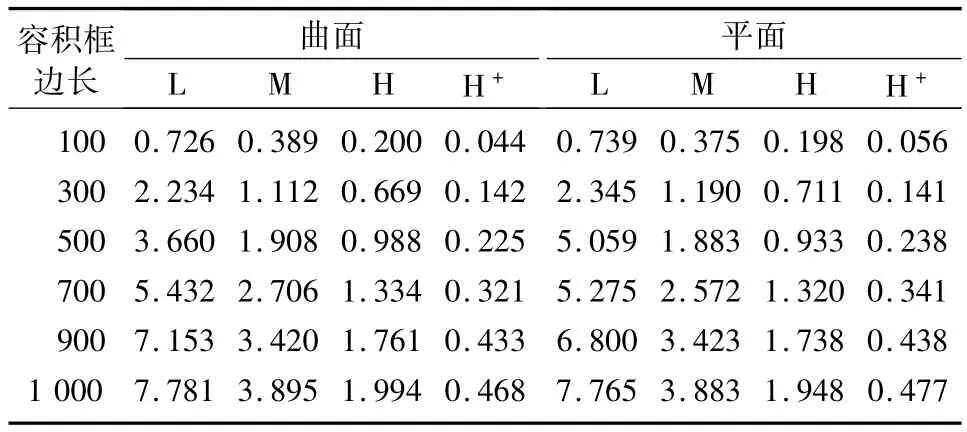
表1 样本数据均值汇总表Tab.1 Summary of the means of sample data mm
3.1 数据分析模型建立
建立如表2所示的双因素重复试验方差分析模型,分析不同分辨率等级、容积框边长及平面和曲面对扫描数据分辨率是否有显著影响。

表2 双因素重复试验方差分析表Tab.2 Two-factor repeated tests ANOVA
根据双因素重复试验方差分析模型,可得出以下假设。
① 假设 H01:α1=α2=… =αr=0(αi称为因子 A在水平Ai的效应)。
② 假设H02:β1=β2=… =βs=0(βj称为因子 B 在水平Bj的效应)。
③ 假设 H03:γij=0,i=1,2,…,r;j=1,2,…,s(γij称为因子A、B在组合水平Ai×Bj的交互影响)。
若假设成立,则表明因子A和B或A和B的交互作用对试验结果无显著影响;否则,因子对试验结果有显著影响。
重复试验二元方差分析的F分布公式如下:

式中:QA为因子A引起的离差平方和;QB为因子B引起的离差平方和;QI为因子A、B交互作用引起的离差平方和;QE为误差;r、s、c为常数。式(1)服从自由度为的F分布;式(2)服从自由度为的F分布;式(3)服从自由度为的F分布。一旦给定置信度水平α,查表即可得F分布的值。若,即拒绝H01,认为因子A对试验结果有显著影响;否则,接受H01,认为因子A对试验结果无显著影响。同理,若,即拒绝H02,否则接受 H02;若,即拒绝H03,否则接受 H03。
3.2 数据分析
根据所建立的方差分析模型,其所涉及的三个因子包括扫描部位、容积框大小、分辨率等级。理论上,要分析这三个因子对分辨率的影响(包括单个或交互影响),应该进行三次组合,即控制一个因子,研究另外两个因子。
设定显著性水平α为5%,控制分辨率等级,并先将其设定为L等级,因子A表示不同的扫描部位,即平面和曲面两种;因子B设定为在L等级下容积框的边长,为100 mm、300 mm、500 mm、700 mm、900 mm、1 000 mm。根据建立的模型,可以计算出因子A的F分布FA=40.174 3和因子B的F分布FB=8 669.787 7,两因子交互作用的F 分布FI=112.803 6,查 F 分布表得到 FA>F0.05(1 528)=3.84,FB>F0.05(5 528)=2.21,FI> F0.05(5 528)。故可认定在L等级下,不同扫描部位、设定不同容积框边长对分辨率的影响是显著的。同理,可得其他三个分辨率等级F值,结果如表3所示。只有在M等级时扫描部位对分辨率影响不显著,除此之外影响皆显著。

表3 各分辨率等级下F值汇总表Tab.3 Summary of F-value at various resolution levels
对于类似可再设定容积框边长讨论扫描部位和分辨率等级对分辨率的影响,以及设定分辨率等级讨论容积框边长和扫描部位对分辨率的影响。为方便统计,建议使用SPSS等统计软件。
由以上分析可知,影响分辨率有三个内部因素:扫描部位、设定的容积框边长和设定的分辨率等级,且都对分辨率影响显著。
3.3 分辨率模型建立
分辨率线性模型表达式为:

式中:D为实际分辨率大小,mm;L为设定的容积框边长,mm。
试验数据的分析结果表明,扫描不同部位对分辨率的影响是显著的。
为了对分辨率有一个更直观的了解,在这里采用加权平均法,即根据被扫描对象的特征估算曲面部位与平面部位所占的比例给予不同的权值。以加权后的结果拟合,既大大简化模型、提高效率,又具有一定的可信度。标准块表面曲面处约占总面积的20%、平面处约占80%,故可取加权值分别为0.2和0.8。拟合结果如表4所示。

表4 拟合参数汇总表Tab.4 Summary of the fitting parameters
由表4可知,该数据模型的拟合度均超过0.979,F值的显著水平也都接近于0,回归方程具有统计学意义。
4 结束语
试验统计获得三维激光扫描仪Handyscan EXAscan的分辨率模型与厂家标定的名义分辨率基本吻合:最高测试分辨率为0.049 7 mm,名义最高分辨率为0.05 mm;分辨率与扫描范围间呈线性关系。此外,从实用角度看,H+级分辨率(最高)扫描时对计算机配置要求较高,难以实现便携的要求。
通过扫描标准块、获取点云模型数据后,应用Geomagic Qualify软件处理、分析并建立模型,以判别三维扫描仪的分辨率水平,是一种切实可行的分辨率测试方法。该方法对于了解、认证扫描仪的分辨率具有重要的指导意义。
[1]林家明,杨隆荣.CCD摄像机技术的发展趋势及应用前景[J].光学技术,1999,11(6):43 -47.
[2]Boehler W,Marbs A.Investigating laser scanner accuracy[R].CIPA Symposium,Turkey,October 2003.
[3]Ahokas E,Yu Xiaowei,Oksanen J,et al.Optimization of the scanning angle for countrywide laser scanning[C]//ISPRS WGⅢ/3,Ⅲ/4,Ⅴ/3 Workshop“Laser scanning 2005”,Enschede,the Netherlands,2005.
[4]杨伟,刘春,刘大杰.激光扫描数据三维坐标转换的精度分析[J].工程勘察,2004(3):61 -63.
[5]朱凌,石若明.地面三维激光扫描点云分辨率研究[J].遥感学报,2008,5(3):405 -410.
[6]徐进军,余明辉,郑炎兵.地面三维激光扫描仪应用综述[J].工程勘察,2008(12):31 -34.
[7]Lichti D,Harvey B.The effects of reflecting surface material properties on time-of-flight laser scanner measurements[C]∥Symposium on Geospatial Theory,Processing and Applications,Ottawa,2002.
[8]苏显渝,李继陶.信息光学[M].北京:科学出版社,2002:306 -316.
[9]杜立彬,高晓辉,夏进军,等.一种新型激光三维扫描测量仪的研制[J].激光技术,2005,8(4):366 -369.
[10]唐朝伟,梁锡昌,邹昌平.三维曲面激光精密测量技术[J].计量学报,1994,4(2):99 -103.
[11]Li W X,Mitchell L D.Laser scanning system testing:errors and improvements[J].Measurement,1995,16(2):91 -101.
[12]王学军,刘平方.三维曲面激光快速自动测量系统[J].激光杂志,1998(2):46 -50。
