塔式起重机远程安全监控管理系统设计
2012-09-19刘海龙
杨 辉 刘海龙
(华东交通大学电气与电子工程学院,江西 南昌 330013)
0 引言
随着国家经济建设的蓬勃发展,对起重设备的需求也越来越大,事故的发生率也呈逐年上升趋势[1]。如何保障起重设备的施工安全和对其进行统一有效管理,已成为迫切需要解决的问题。传统的起重设备仅有载荷和力矩限位等保护措施,且只能实施单机监控或小范围机群监控管理[2],显然已无法满足越来越复杂的现场工况和安全保障要求,严重影响起重设备的施工安全和工作效率。
本文设计了基于GPRS的起重机远程安全监控管理系统,对影响起重机运行安全的现场数据进行了实时采集、分析和存储,并通过GPRS实时地将数据发送至远程监控中心。用户可通过Internet在线浏览监控起重机的工作状态,起重机在计算机的统一管理下,实现不同区域、大范围内诸多参数的同步监测、协调处理和综合判断。
1 系统的总体结构与功能
系统主要由远程监控中心、GPRS无线通信网络、起重机安全监控终端三部分组成。系统总体结构如图1所示。

图1 系统总体结构Fig.1 Overall structure of the system
远程安全监控管理系统通过起重机安全监控终端进行数据实时采集与处理,并利用GPRS无线传输网络将数据信息发送至远程监控中心,为监控人员提供数据管理与分析,实时监控起重机的工作状态。
监控中心服务器通过分配的固定的IP地址与端口连接到Internet网络,主要负责实时接收GPRS发送来的监控数据,并进行统一分析和综合管理。无线通信网络由GPRS网络和Internet组成,是远程监控中心与塔机安全监控终端之间的数据传输媒介。起重机安全监控终端集成了GPRS模块,可以接收GPS卫星定位信息,主要负责对起重设备实施单机监控和本地数据管理,并将起重机监控数据实时地发送至远程监控中心[3-4]。
2 安全监控前端设计
2.1 系统的硬件结构
起重机安全监控终端是安装在起重机驾驶室内的仪表部分,主要实现对起重机关键数据的实时采集与处理,并实现数据远程发送功能。系统硬件平台主要由ARM9微处理器、信号采集模块、控制电路、存储模块、触摸屏显示器、报警系统、GPS模块和GPRS模块等部分组成。系统硬件结构框图如图2所示。

图2 系统硬件结构框图Fig.2 Structure of the system hardware
监控终端系统使用高性能、低功耗的 S3C2440 ARM9微处理器作为主控制器,其最高工作频率可达533 MHz,外围扩展了 64 MB的 SDRAM和 NAND Flash,采用32位WinCE6.0嵌入式操作系统,能够很好地满足系统要求。GPRS模块采用广州致远ZWG-28A,支持 TCP/IP和点对点(point to point protocol,PPP)等协议,提供全透明的数据传输通道,可方便实现无线、远程、网络化的通信方式;同时,可与Internet无缝连接,提供RS-232、SIM卡接口,非常适用于嵌入式系统环境。
2.2 GPRS拨号连接Internet网络
GPRS网络和Internet是安全监控设备和远程监控中心之间数据传输的桥梁。GPRS通过PPP协议的方式获取动态分配的IP地址和端口号,连接成功后,在此基础上以数据传输协议TCP/IP方式实现与服务器之间的通信[5]。GPRS拨号连接工作流程如图3所示。
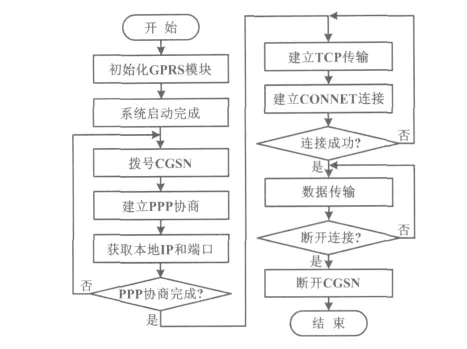
图3 GPRS DTU工作流程Fig.3 Working process of GPRS DTU
系统上电后,对GPRS模块和监控终端进行初始化,系统成功启动后监控终端开始实时对现场数据进行采集与分析,实施单机监控,并将数据存入本地数据库中。GPRS模块初始化完成后则进行拨号,通过PPP协商获得分配的IP地址和端口号;然后建立TCP任务,连接成功后服务器端将返回数据传输信息,监控终端接收指令后进行相应的动作,将从本地SQLite3数据库中提取需发送的历史数据存放至数据发送列队中;最后按照事先定制的通信协议打包处理后定时将数据写入串口,通过连接至串口的GPRS模块发送至远程监控中心。相关通信协议及数据传输格式如下。
① Content-Length:113(发送数据长度)。
② X-mac:1111(起重机型号标志)。
③ Connection:Keep-Alive。
④ type=data&time=data&multiply=data&weight=data&Mweight=data&scope=data&high=data&moment=data&Mmoment=data&slew=data&wind=data(数据传输格式,对应的传输数据为机器型号、时间、倍率、质量、额定质量、幅度、高度、力矩、额定力矩、回转、风速)。
3 监控中心软件设计
3.1 服务软件工作流程
监控中心软件部分由数据收发软件、数据处理与判断、MySQL5.0数据库、Web服务和Web应用程序组成。其中,数据收发软件负责接收起重机安全监控终端发送过来的实时数据信息。同时,在得到监控中心发出对机载监控终端的AT控制命令后,通过Internet和GPRS网络发送到指定的监控终端,实现监控中心与监控终端之间的双向通信,并采用Socket套接字的通信方式完成数据通信。Socket规范定义了一套面向字节兼容的网络编程接口,使用Socket能保证应用程序能通过任何网络通信。数据处理与判断主要是对接收到的数据进行解析并按照起重机相关控制规则逻辑处理后存入数据库中。数据库则为整个系统提供数据存储和查询等服务。Web服务是Web应用程序的一部分,用户通过Web程序可查询使用数据库内容。Web应用程序则是用户访问的接口,采用人性化的界面设计,为用户提供直观简洁的监控信息,并进行数据分析与统计。
3.2 系统软件功能设计
远程监控中心软件通过Java语言开发设计。通过连接Internet的服务器,用户可以通过计算机在线管理监控数据。远程监控中心功能设计主要包括设备管理、业务办理与申请、查看与设置系统配置、数据统计与分析等。软件功能设计关系如图4所示。

图4 远程监控中心功能实现流程Fig.4 Functional implementation of the remote monitoring center
设备管理是整个系统设计的重点,主要实现对现场数据的实时监控,用户可以通过网页在线查询起重设备的运行状态,包括起重机型号、设备是否开机、吊钩运行位置、吊重、高度、力矩、风速、卫星地图等工作参数,并可以查询历史数据信息,对报警预警数据进行提示和统计。业务办理主要是扩展服务功能,如开通短信服务等。统计分析是对数据管理的扩展,主要包括各种工作量核算、故障与事故统计等功能,通过对各类数据的分析与统计,为监督管理部门和用户提供对机群的同步监控和统一管理功能。系统配置通过GPRS的双向通信功能实现,采用TCP/IP通信,远程监控中心通过发送AT命令实现对机载监控终端进行远程控制,实时监控GPRS模块的工作状态,一旦出现异常,就将其复位,保证机载监控终端始终在线。
4 现场测试结果
系统监控终端基于WinCE6.0,设计了友好的人机界面,同时采用文字、声光等方式,实时向起重机驾驶人员提供相关重要数据,供其参考;控制电路有效地保障了起重机的运行安全;远程监控中心设计了简洁直观的用户界面,监控中心可实时监控起重机的运行状态。通过现场测试发现并解决的问题如下。
①系统连续工作超过10 h以上出现反应减慢、死机甚至崩溃的现象。在实时系统中,防止过多的BUG和内存碎片是软件设计的重点。对此,系统采用CodeSnitch对程序进行跟踪,对问题代码进行准确定位,问题得到了很好解决。
②在通信处于空闲状态下无线网络会出现断开连接情况。采用SIM卡号进行注册的方式设计了心跳数据包,保证了DTU和服务器之间的正常连接。
③偶尔出现数据包丢失的现象。GPRS无线传输采用TCP/IP的传输方式,服务器端接收数据包完成后返回接收成功信息,监控终端通过返回信息控制数据包的发送,防止数据包丢失。
④用户通过浏览器在线访问监控主站时,偶尔会出现速度缓慢的现象,影响因素有Internet网络速度、访问量、服务器端硬件设施等。
5 结束语
基于GPRS的塔式起重机远程安全监控管理系统对行业管理部门、设备制造和使用企业具有重要支撑作用。针对目前国内大部分类似产品实时性差、精度低、远程监控功能缺乏等问题,设计了起重机安全监控终端,完成了对起重机本地监控和故障预警,有效地保障了其运行安全。通过GPRS开发了远程监控系统,实现了大范围机群的统一监控和协同管理,在保障安全的同时有效地提高了起重设备的工作效率,具有良好的市场前景。
[1]杨巧萍,刘延雷.国内起重机事故分析与预防对策[J].机械管理开发,2011(2):140 -141.
[2]韩利钧,张优,姚军.塔式起重机安全监控技术的研究与应用[J].建筑安全,2011(3):46 -48.
[3]李国民,董延杰.基于WinCE的桥梁检测系统接收终端的研究[J].自动化仪表,2011,32(1):83 -85.
[4]Wang Liping.GPRS-based electric power remote monitoring system[J].Communications in Computer and Information Science,2011,86:359 -364.
[5]黄志平,赵红卫,朱广超,等.高速动车组远程数据传输系统的研究与实现[J].铁道机车车辆,2011,31(1):33 -36.
