模糊PI控制在光整机防皱辊控制系统中的应用
2012-09-19李宏伟姚养库张美茹
李宏伟,杨 喆,姚养库,张美茹,李 剑
(1.中国重型机械研究院有限公司,陕西 西安710032;2.西安理工大学自动化与信息工程学院,陕西 西安710048;3.中煤西安设计工程有限责任公司,陕西 西安710054)
模糊PI控制在光整机防皱辊控制系统中的应用
李宏伟1,杨 喆2,姚养库1,张美茹3,李 剑1
(1.中国重型机械研究院有限公司,陕西 西安710032;2.西安理工大学自动化与信息工程学院,陕西 西安710048;3.中煤西安设计工程有限责任公司,陕西 西安710054)
光整机的防皱辊控制系统是一个阀控非对称缸的电液伺服位置控制系统。针对其特点,设计了一种基于模糊控制与PI控制相结合的模糊PI控制器。首先,在Matlab中分别应用PI控制和模糊PI控制对系统进行了仿真,并对仿真结果进行了对比分析。最后,在实际的光整机防皱辊控制系统中进行了应用。应用结果表明,模糊PI控制器稳态精度高、动态响应快,能够满足防皱辊控制系统的工作要求。
模糊PI;防皱辊控制系统;电液位置伺服;阀控非对称缸
0 前言
防皱辊装置是一种用于连续式热镀锌光整机的防皱设备,其作用是防止热镀锌光整机生产时带材起皱、抖动,使带钢宽度方向的张力均匀,而且不损坏光整机工作辊的辊面[1]。防皱辊的工作方式是通过控制伺服阀推动液压缸活塞顶端的钢辊,使其达到不同的高度,以顶起光整机出、入口的带钢,达到防止镀锌板起皱的目的。
防皱辊控制系统是一个阀控非对称液压缸的电液伺服位置控制系统。由于组成阀控非对称缸的液压伺服系统的诸多环节都具有一定的非线性[2],且随着生产条件和工况的不同,常存在较大程度的参数变化和变负载干扰。在实际的应用中,这种特性给控制器的设计带来了困难。
常规的PI控制器稳态精度差,动态性能不好,很难达到控制要求。本文针对阀控非对称缸的特性,结合模糊控制和PI控制,设计了一种PI参数自整定模糊控制器。通过模糊规则在线调整PI控制器的参数,使控制器克服了系统动态性能不对称,有效的提高了防皱辊控制的精度。
1 控制系统组成及模型
防皱辊控制系统实质上是一个电液伺服位置控制系统,其基本组成有液压泵站、液压管路、电液伺服阀、非对称液压缸、控制器、位移传感器等,如图1所示。图1中所示的轧机液压伺服系统的主要数学模型由式(1)~(3)描述。
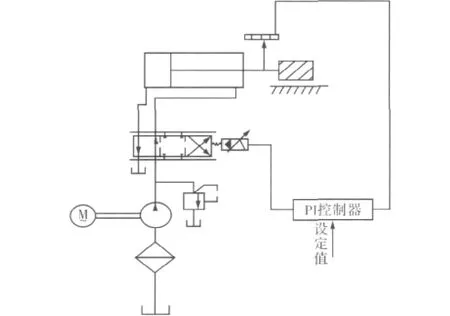
图1 防皱辊控制系统组成示意图Fig.1 Schematic diagram of crease-resist roll control system
伺服阀的流量方程为

式中,QL是伺服阀的负载流量;Xv为阀芯位移;Cd为流量系数;w为阀套的窗口宽度;ρ为液压油的密度;Ps为液压油的供油压力;Pf为负载压力。
油缸内的流量方程为

式中,Vt为液压缸油腔的总体积;Xt为液压缸的输出位移;At为液压缸活塞的等效面积;Ctp为总泄漏系数;βe为等效容积弹性模数。
液压缸的负载力平衡方程为

式中,mt为活塞和轧机辊系的总质量;Bt为活塞与负载运动的粘性阻尼系数;fl为轧制力;Kt为负载弹性刚度。
从液压伺服系统的模型中,首先,伺服阀的流量特性是一个典型的非线性环节,其数学模型只能针对某一工作点进行描述,无法全面反映所有的工作状态。其次,由于系统使用的是非对称液压缸,其两腔有效作用面积不相等,在活塞运动的两个方向上系统的开环增益、阻尼比等参数发生变化,使得两个运动方向上的动态特性不对称。另外,在防皱辊工作过程中,由于使用的高度不同,防皱辊所承受的压力作为系统的干扰会有很大的变化。同时,由于生产中引起的液压元件的磨损和温度的变化,使得液压油的弹性模数、油缸的粘性阻尼系数等参数都会产生变化。这些因素使得传统的PI控制难以满足防皱辊控制系统的要求,本文设计的模糊PI控制器可以在线调整PI参数。并通过系统的Matlab仿真和在实际系统中的应用,验证了控制算法的有效性。
2 控制器的设计
2.1 模糊PI控制器的原理
模糊PI控制兼有模糊控制和PI控制的优点,通过模糊推理,在线调整PI控制器的各项参数,使控制器鲁棒性强,适应能力高,有良好的动态跟踪品质和较高的稳态精度。
传统的PI控制器可表示为

式中,Kp为控制器的比例系数;Ki为控制器的积分系数;Kd为控制器的微分系数。
模糊PI控制算法以误差E和误差变化率Ec为输入,利用模糊控制规则在线对PI参数Kp、Ki、Kd进行修改,以满足不同工况系统的控制要求。其结构如图2所示。
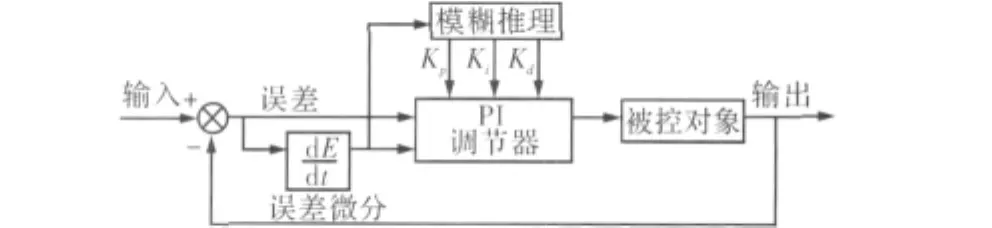
图2 模糊PI控制器结构Fig.2 Structure of fuzzy-PI controller
2.2 模糊PI控制器的设计
根据防皱辊控制系统的特点,控制器设计为模糊PI控制器,即模糊推理设计为两输入两输出的形式,输入为系统误差E和误差变化率Ec,输出为PI控制器的比例系数Kp和积分系数Ki。
选取E、Ec的模糊子集均为{负大,负中,负小,零,正小,正中,正大},并记为{NS,NM,NB,O,PS,PM,PB},其模糊论域为{-6,-4,-2,0,2,4,6}。Kp的模糊子集为{小,中,大},记为{S,M,B},模糊论域为{1,3,6}。Ki的模糊子集为{零,小,中,大},记为{O,S,M,B},模糊论域为{0,2,4,6}。根据实际液压系统的油缸行程和固有特性,误差E的基本论域为 [-130,130],误差变化率Ec的基本论域为 [-0.4,+0.4],Kp的基本论域为 [0,10],Ki的基本论域为 [0,0.2]。误差和误差变化率的量化因子Ke、Kec,可由式(5)确定。
为了提高在实际系统中计算的实时性,各个语言变量的隶属度函数均采用线性函数,如图3~6中所示。

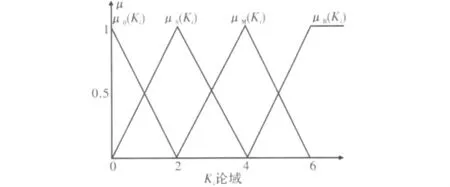
图6 隶属度函数Fig.6 Kimembership functions
针对实际对象的特性和操作经验,并结合PI控制的调节原理,本文设计的模糊PI控制器的控制规则如下:
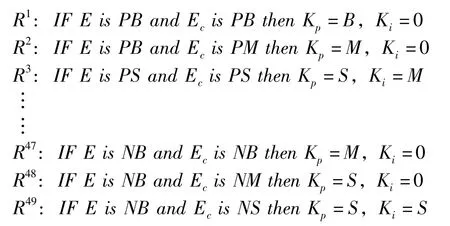
根据上述规则,先求取每条控制规则对应的模糊关系Ri,再求取总的控制规则对应的模糊关系R。

在每个控制周期,根据输入的误差E、误差变化率Ec和总模糊关系R,利用Mamdani模糊推理方法分别得到相应的比例系数Kp和积分系数Ki的模糊值。采用加权平均法计算得到Kp和Ki的精确值。把Kp和Ki带入到PI控制器中进行计算,即可得到系统实际的控制量。
3 仿真研究
以实际的光整机防皱辊控制系统为对象,在Matlab/Simulink中建立非对称液压缸位置系统的模型,并进行模糊PI控制仿真,系统仿真框图如图7所示。实际系统的参数见表1。

表1 实际系统参数Tab.1 Actual system parameters
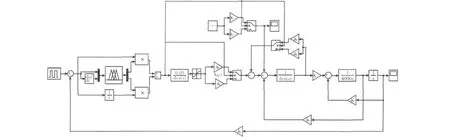
图7 Fuzzy-PI控制系统仿真框图Fig.7 Block diagram of Fuzzy-PI system simulation
在实际的防皱辊控制系统中,非对称液压缸在两个方向上的不同特性以及防皱辊辊面所受不同压力都影响系统的动态特性。所以,针对不同的负载,在液压缸两个方向上分别对系统进行了仿真。
在轻负载的状态下,仿真结果如图8所示。

图8 轻负载下仿真结果Fig.8 Simulation results under light load
在重负载的状态下,仿真结果如图9所示。
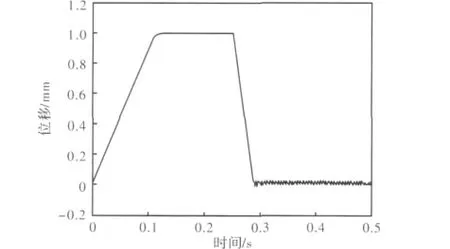
图9 重负载下仿真结果Fig.9 Simulation results under heavy load
同时,在轻负载的状态下,对传统的PI控制与模糊PI控制的效果进行了仿真对比,对比结果如图10所示。

图10 仿真对比Fig.10 Simulation contrast
从仿真的结果可以看出,模糊PI控制器根据实际的工作条件不断的修正控制参数,在不同的负载下均能有满意的控制效果,具有较高的精度,并且在一定程度上能够消除非对称液压缸在正负两个方向上的差异。
4 工程应用
在某厂实际的镀锌线光整机防皱辊控制系统上,对模糊PI控制器进行了应用试验。在实际的控制系统中,为了保证控制的实时性,减少在线计算的时间,根据对系统仿真时得到的数据,制成模糊规则查询表,并存储在控制计算机中。在每个采样周期,计算得到误差E和误差变化率Ec,查询模糊规则表,得到相应的Kp和Ki。在实际系统中测试的结果如图11中所示。
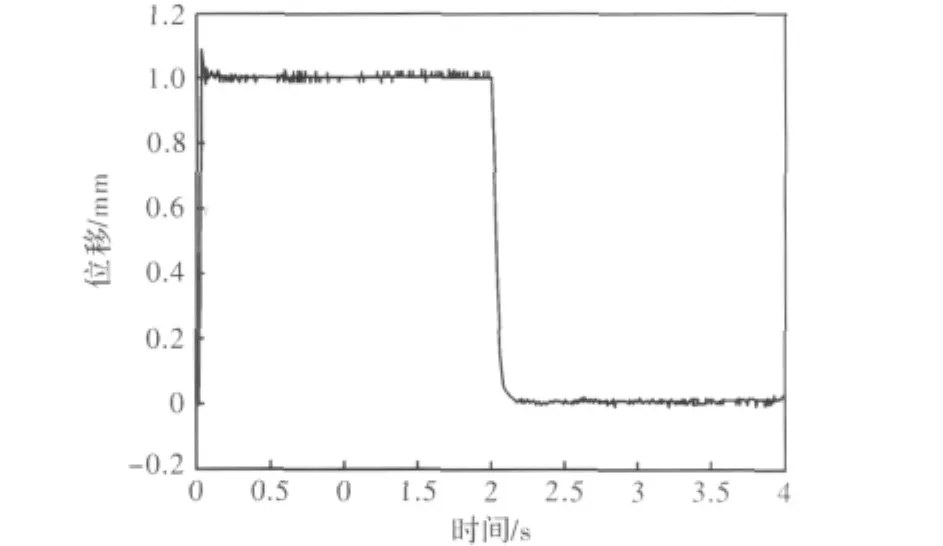
图11 实际测试结果Fig.11 Measured results
通过实验对比,本文设计的控制策略具有较强的自适应能力,能够满足系统这种存在较大程度的参数变化和大时变负载干扰的系统的控制要求,对提高防皱辊位置控制的精度是一种有效手段。
[1]孟红,王鹏,王社昌.光整机的防皱辊装置[P].专利号:200420086197.
[2]刘长年.液压伺服系统优化设计理论 [M].北京:冶金工业出版社,1989.
[3]王占林.近代电气液压伺服控制 [M].北京:北京航空航天大学出版社,2004.
[4]吴振顺,付丙勤,冯玉宾,等.自适应逆控制在电液伺服系统中的应用[J].哈尔滨工业大学学报,2005,37(3):385-387.
[5]廉小亲.模糊控制技术 [M].北京:中国电力出版社,2003.
[6]张友旺,桂卫华,赵泉明.基于动态递归模糊神经网络的自适应电液位置跟踪系统[J].控制理论与应用,2005,22(4):551-556.
[7]刘云峰,缪栋.电液伺服系统的自适应模糊滑模控制研究 [J].中国电机工程学报,2006,26(14):140-141.
App lication of fuzzy PI control in crease-resist roll control system of skin passm ill
LIHong-wei1,YANG Zhe2,YAO Yang-ku1,ZHANG Mei-ru3,LIJian1
(1.China National Heavy Machinery Research Institute Co.,Ltd.,Xi'an 710032,China;2.School of Automation and Information Engineering,Xi'an University of Technology,Xi'an 710048,China;3.Xi'an Design Engineering Co.Ltd,CCTEG,Xi'an 710054,China)
The crease-resist roll control system in skin passmill is a electro-hydraulic position servo system of valve controlled asymmetric cylinder.For its features,a fuzzy-PI controller based on fuzzy control strategy and PIcontrol strategy was designed.First,the control system using PIcontroland fuzzy-PIcontrolwas simulated in Matlab,and then the simulation results were compared and analysed.Finally,the designed controller was applied to a crease-resist roll control system of skin passmill.The practical application indicates that the fuzzy PI controller can improve the steady state accuracy of the system,has rapid dynamic responce and can meet the working requirements of crease-resist roll control system.
Fuzzy PI;crease-resist roll control system;electro-hydraulic position servo;valve controlled asymmetric cylinder
TG333
A
1001-196X(2012)04-0022-05
2011-12-05;
2012-01-20
李宏伟(1978-),男,中国重型机械研究院有限公司工程师。