Buck型DC-DC变换器中单输入模糊控制器的设计与实现
2012-09-17常昌远黄金峰
常昌远 陈 瑶 黄金峰 王 青
(东南大学集成电路学院,南京 210096)
Buck型DC-DC变换器中单输入模糊控制器的设计与实现
常昌远 陈 瑶 黄金峰 王 青
(东南大学集成电路学院,南京 210096)
提出了一种简化的用于数字控制DC-DC变换器的模糊控制算法——单输入模糊控制算法.通过在算法中引入符号距离法,将常规模糊控制算法中的2个输入简化为单个输入,从而使相应的模糊规则条数明显减少.在此基础上,采用FPGA设计了单输入模糊控制器,并进行了系统验证.测试结果表明,在输入电压为2.7~3.5 V、输出电压为0.8~1.5 V的Buck型DC-DC开关变换器中,系统的建立时间小于150 ms,稳态误差小于10 mV.与常规模糊控制器相比,这种单输入模糊控制器具有设计、调节和硬件实现简单等优势,因而有望在数字控制DC-DC变换器中得到广泛应用.
单输入模糊控制器;常规模糊控制器;数字DC-DC变换器;场编程门阵列(FPGA)
近年来,随着便携式设备的普及,在一些高端应用中传统DC-DC变换器的实际应用效果并不理想.这主要是因为DC-DC变换器本质上是一个非线性对象,是一种基于小信号模型设计出来的控制器,不能保证系统在输入和负载大范围变化时的稳定性;此外,DC-DC变换器的供电系统、负载变化以及外界干扰均存在不确定性,利用传统的控制策略难以进一步提高系统性能.可选方案是建立更精确的非线性模型或运用非线性控制策略.模糊控制算法是一种人工智能控制方法,它不依赖于被控对象的数学模型,具有较强的鲁棒性,适用于复杂、可变的或结构不确定、难以用准确的数学模型描述的系统,因而在 DC-DC变换器中得到广泛应用[1-3].
常规的模糊控制器中包含模糊化过程、复杂的言语推理决策过程、规则存储以及解模糊操作过程[4-5],实现过程复杂,处理时间和资源占用均不具优势,特别是对于开关电源这种要求在一个开关周期内完成算法的计算具有一定的挑战性.由于模糊规则条数与模糊子集数目成平方关系,而且模糊规则表直接关系到模糊控制器的设计难度和调节精度,因此如果能够在保证调节精度的条件下减少模糊规则的条数,便能实现快速调节,从而提高响应速度,降低设计难度.文献[6-7]中提出了符号距离法的概念,并将此概念用于简化设计模糊控制算法,得到一种新的单输入模糊控制算法.
本文通过分析常规模糊控制算法和单输入模糊控制算法的原理与特性,设计了一种基于单输入模糊控制算法的Buck型DC-DC变换器,并进行了FPGA验证.结果表明,与常规模糊控制器相比,单输入模糊控制器设计更为简单方便,并能实现较好的调节效果.
1 常规模糊控制器
常规模糊控制器具有2个输入和1个输出.基于常规模糊控制算法的数字Buck型DC-DC变换器原理图见图1.具体的设计步骤如下所述.
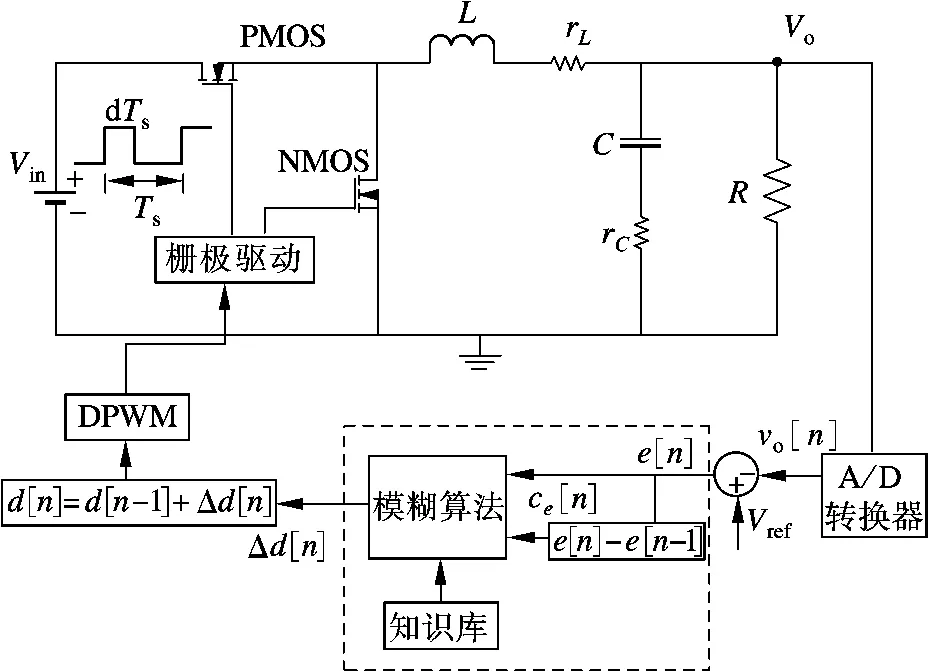
图1 数字Buck型DC-DC变换器原理图
1.1 输入变量、输出变量及其范围的确定
模糊控制器具有2个输入,分别为误差电压e[n]和误差电压的变化率ce[n],其计算公式为

式中,Vo[n]为第n时刻A/D转换器的数字输出量;Vref为给定的数字参考量;ce[n]为第n时刻与第n-1时刻的误差电压之差.
1.2 隶属函数分布的确定
根据文献[8]可知,模糊子集数目并非越多越好,数目的增加会增大实现的复杂度,最优可取为7.本设计将输入和输出变量的论域统一定义为7个模糊子集,相应的语言值为:负大(NB)、负中(NM)、负小(NS)、零(ZE)、正小(PS)、正中(PM)和正大(PB).三角形隶属函数对输入变化的敏感性较其他隶属函数强.当输出有一定误差时,控制器能迅速地调整占空比控制信号,这对控制器的性能来说是很重要的.为了使控制器在主要的论域范围内快速响应输入变化,可以通过设置参数使靠近零附近的隶属函数密度大,远离零的隶属函数密度小.
1.3 模糊规则表的确定
DC-DC变换器工作范围内控制信号的范围为25% ~40%.对此范围内的3种固定占空比控制信号下的误差趋势进行仿真,以便制定模糊规则表.图2给出了3种固定占空比控制信号下输入电压增大时误差电压的水平测试.由图可知,对于这3种测试情况,反馈网络在输入电压分别约为3.2,2.0,1.5 V时开始发生作用.当反馈网络发生作用时,误差电压均低于0.4 V.

图2 不同占空比控制信号下误差电压的仿真曲线
根据上面的讨论,结合系统阶跃响应和不同占空比控制信号下误差电压的变化趋势,便可得出以下4条准则:
1)当输出电压远离基准电压时,占空比的变化量应增大,使输出电压能够快速到达设置点.
2)当输出电压已靠近并快速接近基准电压时,占空比应保持恒定,防止超调.
3)当输出电压等于基准电压,但输出点仍在变化时,占空比应微小变化,以防止输出点偏离设置点.
4)当输出电压大于基准电压时,占空比的变化量应为负;反之亦然.
基于以上准则可得49条控制规则(见表1).
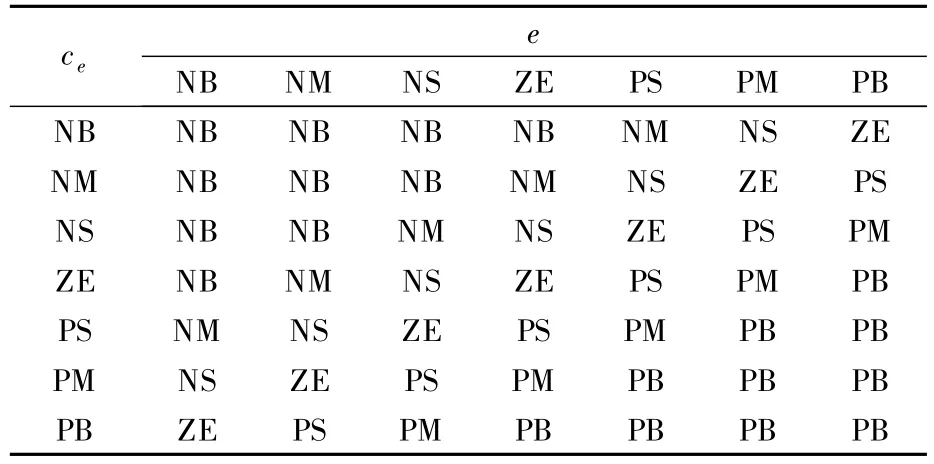
表1 常规的模糊控制规则表
1.4 解模糊
采用重心法解模糊方式,得到占空比变化量为

式中,wi为隶属度;Ci为输出隶属函数的重心点.
2 单输入模糊控制器
与常规模糊控制器相比,单输入模糊控制器将2个输入变量转换为1个等效输入变量,从而简化了电路结构,减少了计算量.
2.1 符号距离法
根据表1可知,常规模糊控制器的规则表具有特普利茨结构,即每条对角线上的数是相同的.主对角线两边的数具有反对称特性,即Δdij=-Δdij.如果以变量e为横坐标,变量ce为纵坐标,并将变量的量化台阶取无限小,则可将表1转化为图3,相应的控制规则变为7条边带,且控制输入的绝对值与其到主对角线的距离成线性关系[2].主对角线可用线性函数表示,即

式中,λ为斜率.
设点P(ce1,e1)为任一工作点.将工作点向开关线作垂直线,其与开关线的交点为H(ce,e)(见图4),则P(ces,es)到H(ce,e)的距离ls可表示为
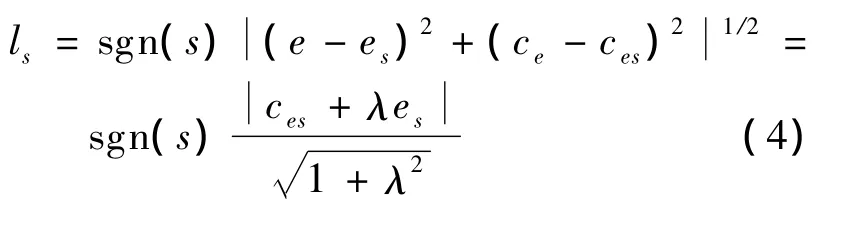
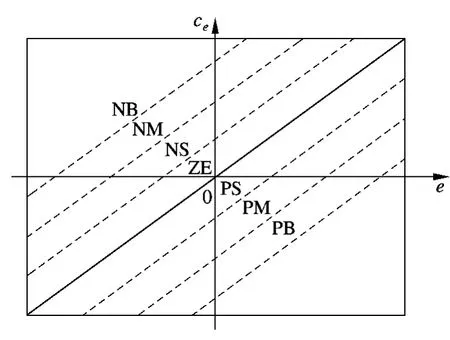
图3 无限小量化台阶的规则表
式中


图4 符号距离示意图
开关线s>0时对应的控制输入为负,s<0时对应的控制输入为正,且控制输入的绝对值与符号距离ls成线性关系,由此可得

因此,可以将由变量e和ce组成的二维空间等效为由符号距离ls组成的一维空间,即模糊规则可以由符号距离来决定.由此可知,常规的模糊控制器可用单输入模糊控制器来替换.
2.2 单输入模糊控制器的设计
2.2.1 输入变量系数的确定
根据式(4)中误差变量e和误差变化率ce与符号距离ls的关系,可以得到单输入模糊控制器的结构框架图(见图5).图中,kη为增益因子.
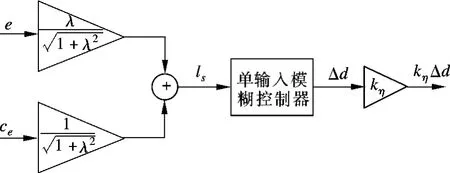
图5 单输入模糊控制器的结构
模糊控制算法和数字PI补偿算法的形式一样,因此可以考虑用数字PI补偿算法的系数来确定λ的值[3,5].PI补偿算法的z域传递函数为

式中

式中,Ts为开关周期;Kp和Ki分别为比例系数和积分系数,在本设计中Kp=8.125,Ki=5.7×104.将式(6)转化至离散域可得

根据图5和式(7),可以得到输入变量的系数具有如下关系:

2.2.2 单输入模糊控制规则表的确定[9]
单输入模糊控制器的最大优点是规则数从原来的p2条减少为p条.单输入模糊控制器的规则表如表2所示.表中,L表示符号距离,下标表示隶属函数.

表2 单输入模糊控制算法的规则表
2.2.3 解模糊
采用重心法进行解模糊化处理时,可将式(2)简化为

由式(9)可知,单输入模糊控制器的解模糊过程较常规模糊控制器省去了除法计算.
因此,第n时刻的占空比信号可表示为

3 FPGA系统验证
在FPGA中实现了单模糊控制的数字Buck型DC-DC变换器,具体测试实物见图6.图中,A/D转换器采用TLC5510芯片,PMOS和NMOS的型号分别为IRF9540和IRF540n.DC-DC变换器的工作原理如下:输出电压经A/D转换器变换为6 bit的数字信号,再经模糊控制器和DPWM模块变换为脉宽控制信号;该信号通过驱动电路控制功率MOS管的开或关,再经滤波网络达到处理输出电压的作用[10].
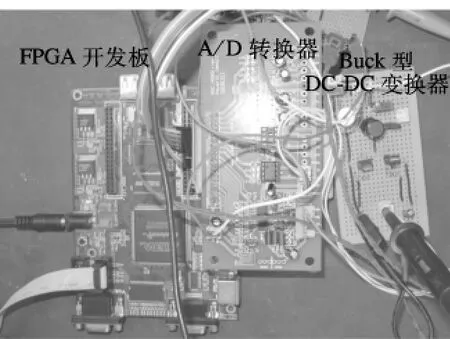
图6 FPGA验证的实物图
FPGA验证的实验条件如下:开关频率为1 MHz;电感和电容分别为 9.4 μH 和 10 μF,其寄生电阻分别为0.09和0.5 Ω;负载电阻为5 Ω.
测试内容为系统在单模糊控制下的纹波特性、软启动过程以及负载调整率曲线.图7给出了纹波电压的验证结果.由图可知,输出电压周期为1 ms;输出电压CH1的平均值为1.19 V,峰-峰值为160 mV;对应DPWM模块输出的脉宽信号CH2的频率为1 MHz,平均值为2.47 V;纹波电压约为40 mV,毛刺为噪声.软启动的波形见图8.由图可知,系统于150 ms左右完成启动,并且无过冲现象.
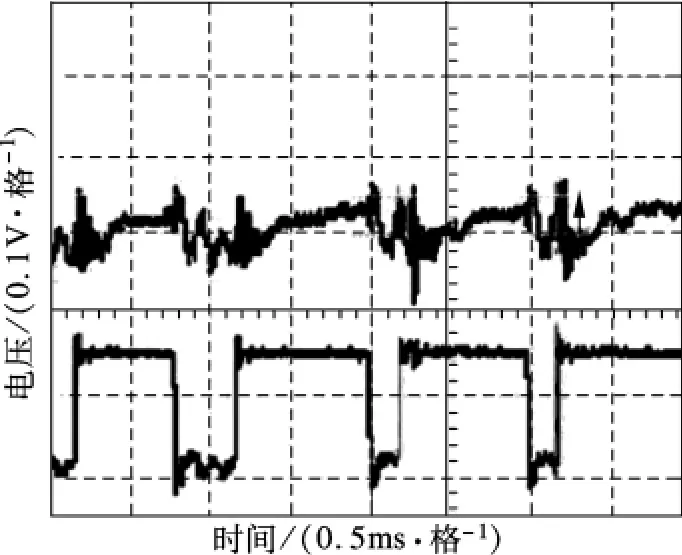
图7 纹波电压的测试结果
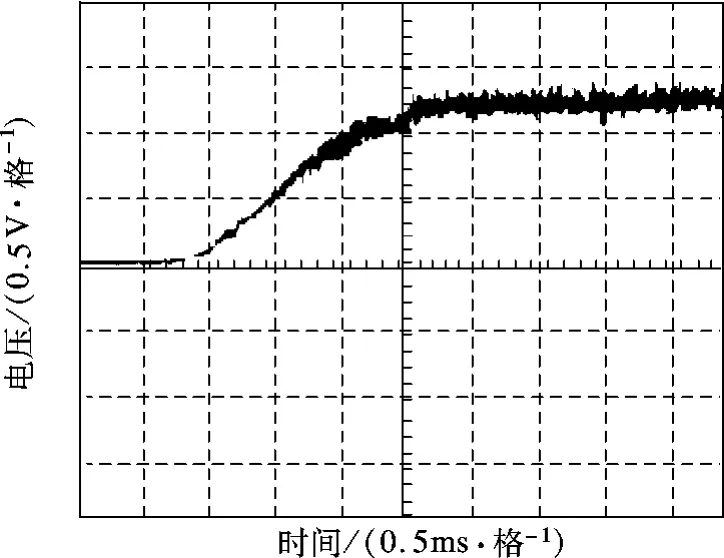
图8 单输入模糊控制器的启动过程
表4为常规模糊控制器与单输入模糊控制器的性能比较.由表可知,2种控制器的性能相当.因此,单输入模糊控制器能够满足DC-DC变换器的应用要求.

表4 2种模糊控制器的性能比较
4 结语
本文设计了一种用于数字Buck型DC-DC变换器系统的单输入模糊控制器,取得了满意的跟踪效果.与常规模糊控制器相比,单输入模糊控制器仅含有1个等效输入变量,因而大大减少了规则条数,使模糊控制器的设计和实现更为容易,可望在DC-DC变换器的数字控制等领域得到广泛应用.
[1] Gupta T,Boudreaux R R,Nelms R M,et al.Implementation of a fuzzy controller for DC-DC converters using an inexpensive 8-b microcontroller[J].IEEE Trans on Industrial Electronics,1997,44(7):661-669.
[2]Viswanathan K,Oruganti R.A universal fuzzy controller for a non-linear power electronic converter[C]//IEEE International Conference on Fuzzy Systems.Honolulu,HI,USA,2002:46-51.
[3]Perry A,Feng G,Liu Y,et al.A new design method for PI-like fuzzy logic controllers for DC-DC converters[C]//The35th Annual IEEE Power Electronics Specialists Conference.Aachen,Germany,2004:3751-3757.
[4] Arias J,Arias A,Gomariz S,et al.Generating design rules for buck converter-based fuzzy controllers[C]//IEEE International Symposium on Circuits and Systems.Atlanta,GA,USA,1996:585-588.
[5] Choi B J,Kwak S W,Kim B K.Design of a single-input fuzzy logic controller and its properties[J].Fuzzy Sets and Systems,1999,106(3):299-308.
[6]Choi B J,Kwak S W,Kim B K.Design and stability analysis of single-input fuzzy logic controller[J].IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,2000,30(2):303-309.
[7] Zdenko Kovacic,Stjepan Bogdan.Fuzzy controller design theory and applications[M].Dubrovnik,Croatia:CRC Press,2005:38-44.
[8]Taeed F,Salam Z,Ayob S M.Implementation of single input fuzzy logic controller for boost DC to DC power converter[C]//2010IEEE International Conference on Power and Energy.Kuala Lumpur,Malaysia,2010:797-802.
[9]李二超,李战明,刘微容.单输入模糊控制在液位控制系统的应用[J].航空制造技术,2009(5):82-89.Li Erchao,Li Zhanming,Liu Weirong.Application of Single input fuzzy controller in liquid level control system[J].Aeronautical Manufacturing Technology,2009(5):82-89.(in Chinese)
[10]Altera Corporation.QuartusⅡ handbook[EB/OL].(2008)[2011-02-01].http://ecpe.ee.iastate.edu/arun/Cpre381_Sp06/lab/labw01a/QuartusII_Handbook.pdf.
Design and implementation of single input fuzzy controller for Buck DC-DC converter
Chang Changyuan Chen Yao Huang Jinfeng Wang Qing
(College of Integrated Circuit,Southeast University,Nanjing 210096,China)
A simplified fuzzy control algorithm used for digitally controlled DC-DC converters,the single input fuzzy control algorithm,is proposed.In this algorithm,the signed distance method is introduced to simplify the two inputs in the conventional fuzzy control algorithm to a single input,making the number of the corresponding fuzzy rules significantly reduced.On this basis,the single input fuzzy controller is designed by the field-programmable gate array(FPGA),and the final verification is performed.The experimental results show that for the Buck DC-DC switching converter,when the input voltage is 2.7 to 3.5 V and the output voltage is 0.8 to 1.5 V,the set-up time is less than 150 ms and the steady-state error is less than 10 mV.Compared with the conventional fuzzy controller,the single input fuzzy controller has simpler hardware implementation in design,regulation and implementation.Therefore,it may be widely used in digitally controlled DC-DC converters.
single input fuzzy controller;conventional fuzzy controller;digital DC-DC converter;field-programmable gate array(FPGA)
TN432;TN402
A
1001-0505(2012)02-0229-05
10.3969/j.issn.1001 -0505.2012.02.007
2011-08-01.
常昌远(1961—),男,博士,副教授,ccyycc@seu.edu.cn.
国家核高基重大专项资助项目(2009ZX01031-003-003).
常昌远,陈瑶,黄金峰,等.Buck型DC-DC变换器中单输入模糊控制算法的设计与实现[J].东南大学学报:自然科学版,2012,42(2):229-233.[doi:10.3969/j.issn.1001 -0505.2012.02.007]
