脉冲实时测向算法的改进设计与实现
2012-09-03龙慧敏
龙慧敏
(中国西南电子技术研究所,成都 610036)
1 引 言
由于敌我识别(IFF)和战术空中导航(TACAN)系统在现代电子战争中具有举足轻重的作用[1],使敌我识别和战术空中导航(塔康)信号侦察识别技术成为现代电子战侦察技术研究的重要内容[2-3]。通过对所截获的敌我识别、塔康信号脉冲的实时测向,结合对信号的参数测量和识别,可实现对目标的侦察监视,得到目标的多种重要参数和运动轨迹。
与通信信号不同,敌我识别信号、塔康信号均为突发短时脉冲,尤其是西方体制敌我识别信号,最小脉冲宽度仅为0.45 μ s。在以往针对这类脉冲信号的侦察测向技术研究中,由于其脉冲较窄的特性,信号处理能够获取的有效数据极少,难以实现高精度的测向。同时,在实际的战场信号环境中,敌我识别等脉冲信号的突发性和密集性也凸显了高速实时测向的重要性。在以往的工程实现中,脉冲测向时间通常为毫秒级别,无法快速有效地得到目标方向信息,导致目标信号丢失。
FPGA是一种高速逻辑器件,具有高速数据处理能力。本文基于相关干涉仪测向原理,在一片Xinlix V5SX95T FPGA中建立了脉冲测向模型,通过对测向模型的一系列改进实现了对不同脉宽、突发性极强的各种脉冲信号的快速实时高精度测向。
2 测向原理
2.1 相关干涉仪
干涉仪测向利用无线电波在接收天线阵的不同阵元上形成的相位差来确定源信号的方向。相关干涉仪测向处理就是将实际天线阵列收到的信号相位差向量,与标准测试环境下利用信号源产生信号,测量出不同AOA和不同工作频率下的相位差构建的标准样本集进行相关比较,找出最相似的相位差向量样本,根据样本在样本空间的位置,从而获取电波的入射方位。
2.2 基于FPGA的测向流程
脉冲信号测向模型总体方案设计原理框图如图1所示,其中输入信号的采样频率为40MHz。

图1 模型原理框图Fig.1 Block diagram of reconnaissance and DOA estimation system
在通信信号的测向处理中,通常采用多点FFT和反正切函数相结合的方式对信号测向[4]。设采样率为40MHz,FFT点数为2 048,测向耗费的时间为100 μ s左右,其中包括信号组帧时间、FFT计算时间、相位计算时间和相关运算输出结果的时间。
对于敌我识别和塔康信号脉冲来说,由于其突发性和脉冲长度的不定性,在采用FFT-反正切测向所需的100 μ s之内,若有新脉冲到来,极可能被丢掉。因此,脉冲测向时采取上述方法很难做到脉冲的全截获和高速实时测向。
除了FFT方法之外,可直接计算N组IQ信号每一个样点的相位,再将两两相减,形成C2N路相位差,通过累加求平均,得出脉冲对应的相位差平均值,如图2所示。
图2所示的测向流程中,反正切IP核个数较多,资源占用很高;在计算相关函数时,需要用到累加器和除法器,不同脉宽脉冲所需的累加器和除法器长度不同,是导致FPGA资源高消耗的原因之一;且天线阵列数增加会导致资源占用急剧增加。在测向时间方面,优化前的流程耗费的时间大致为T=T1+T2+T3,若处理时钟为40 MHz,天线阵列数 N=4,T1为计算反正切和相关函数的时间,略大于脉冲宽度(针对 IFF和TACAN信号,T1为 0.45~112 μ s),T2为相位库读取时间(相位库为1°间隔时,相位库大小为6×181,读取时间为4.525 μ s;T3为计算来波方向时间,大概耗费时间为1 μ s,流程中其他时间可忽略不计,也就是说总的测向耗费时间T>6 μ s,最长耗费时间则大于118 μ s,在测向实时性通用性方面无优势。
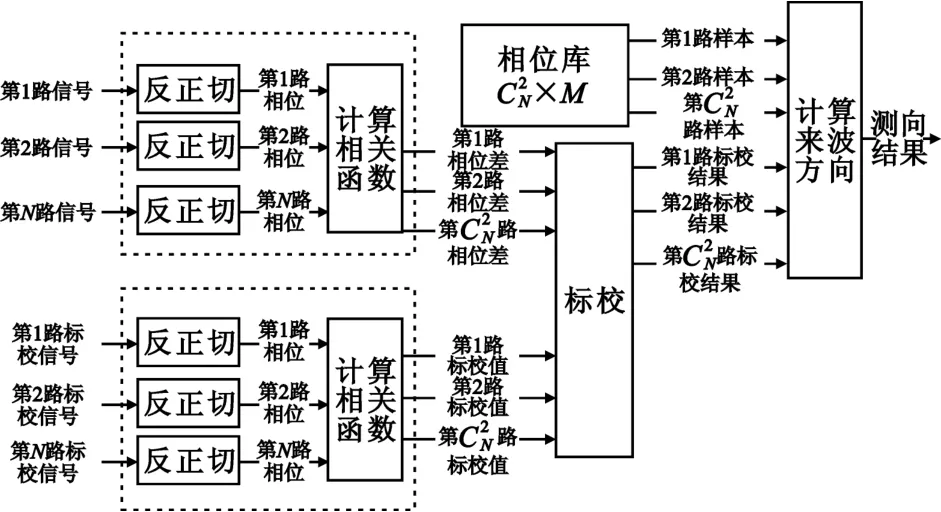
图2 测向原理框图Fig.2 Block diagram of DOA estimation system
3 测向流程改进方案及FPGA实现
3.1 测向流程改进方案
本文对图2所示的测向流程进行了优化改进,尽可能地对资源进行复用,将大大降低资源占用,并在流程的多个环节中引入高速时钟,设计了相关函数阶梯计算方法,减少了时间消耗。改进的测向流程如图3所示。

图3 优化测向流程框图Fig.3 Block diagram of optimized DOA estimation
为减少资源占用,降低功耗,图3所示优化流程在提取信号相位时采用了“并串—串并”转换结合的方式。通过复用一个反正切函数模块计算出一路高速串行信号中每个样点的相位,再将串行高速相位转换为N路fs低速相位输出。采取这种模式,使用高速运算将原本需要N个的反正切IP核减少为1个,有效降低FPGA内部资源占用。
在标校过程中,FPGA收到的N路信号为标校源发出的标校信号,通过复用的测向模块计算并存储标校信号的相位差向量,标校过程完成后,信号切换为脉冲信号,FPGA开始对输入的脉冲信号进行测向,得到的相位差向量与存储的标校信号相位差向量相减,去模糊后得到标校后的相位差向量。由于脉冲到达的不确定性,流程中设置了存储区对标校之后的相位差向量进行缓冲,不仅可最大限度地保留可测到的相位差向量,且有利于配合方向计算模块中的高速相关处理。缓冲区大小可根据实际环境中脉冲数量和FPGA内部资源等因素来设置。
设计中相位库的获取采取了理论相位库和实测相位库结合的方式。FPGA根据输入信号的不同频点,从外部的存储空间中将对应频点的理论相位库读入相位库存储区用于计算。在实际情况下,由于各种不同环境的影响,理论库是存在一定偏差的。此时FPGA可接收上位机发出的建库命令,进入建库流程。
为降低FPGA内部资源消耗,图3的优化流程中,测向、标校和建库复用整个测向流程,输入信号和输出结果由外部的流程选择信号来控制。选择信号为标校有效时,输入信号为标校信号,输出结果为标校相位差,存储在标校值存储区中,供测向流程调用;选择信号为建库有效时,输入信号为建库信号,输出结果为实采相位差,存储在相位库中,供测向流程调用;选择信号为测向有效时,输入信号即天线输入的待测向信号,输出结果为信号来波方向。
FPGA将测量的相位差向量和相位库中对应的相位差一一相减,求该差值的余弦,并将所得路余弦值求和,其最大值对应的相位库中方位即为信号入射角。由于上述计算过程需要耗费固定的时长,为提高效率,达到实时测向的目的,本设计中利用高速时钟进行相关处理。模型计算出的相位值精度受产生相位库时采取的方向步进的限制,为减小方向误差,对测向结果进行插值处理,提高测向精度。
3.2 优势对比
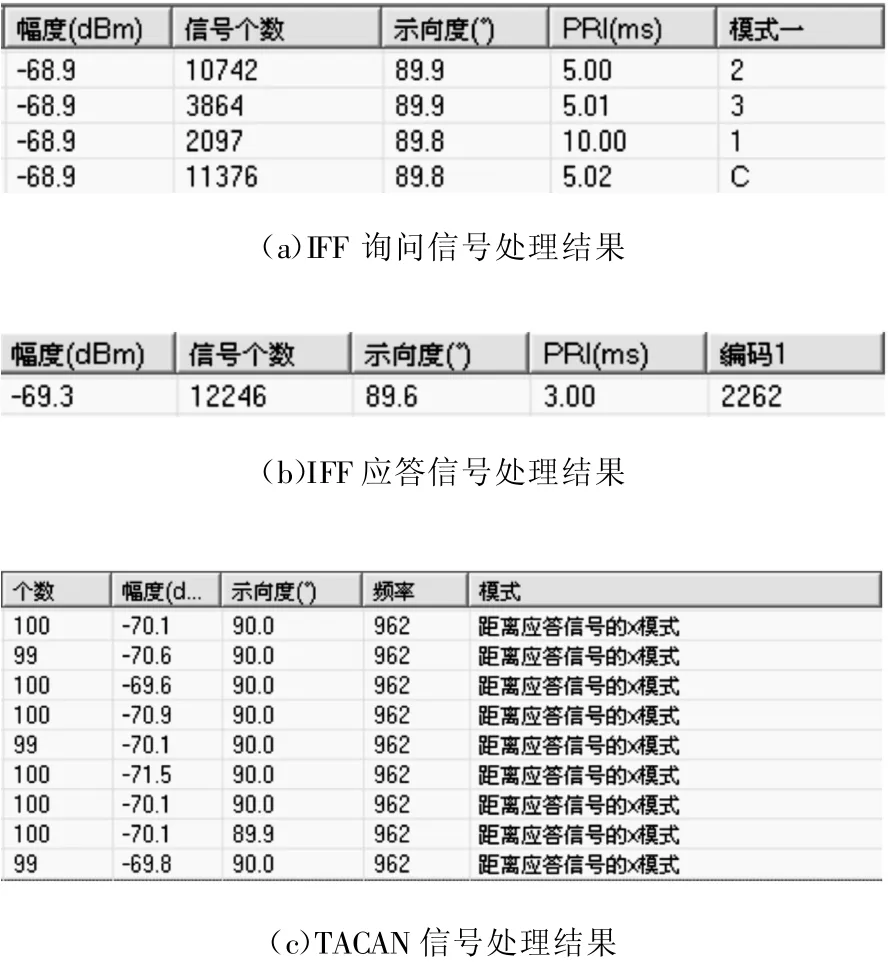
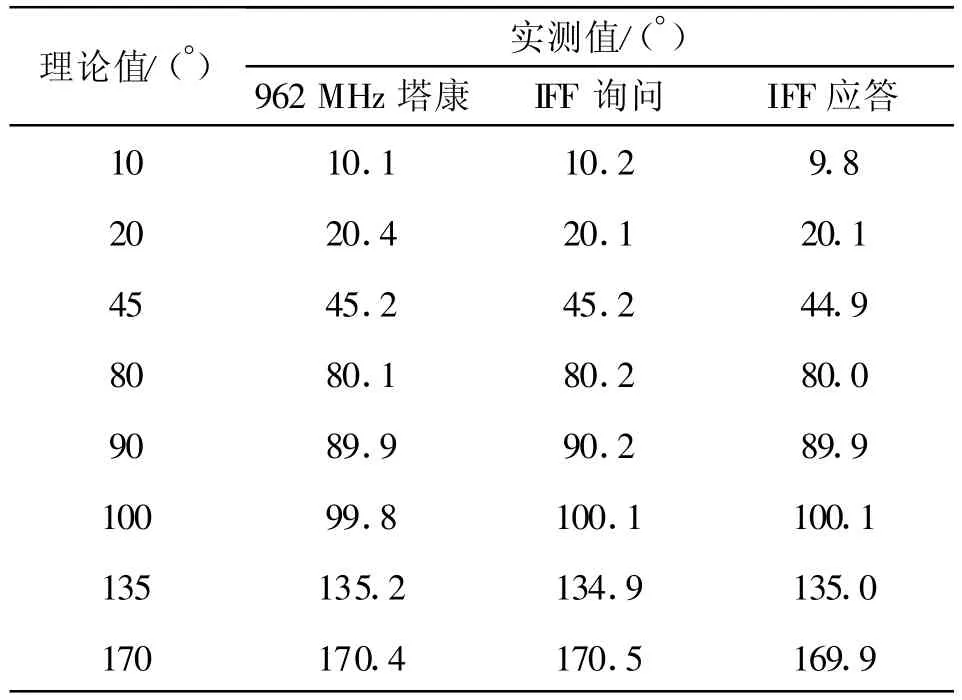
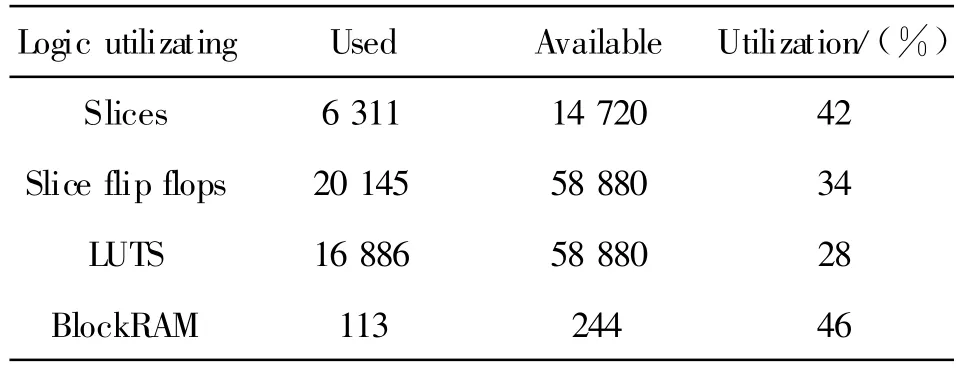
在测向时间方面,天线阵列数 N=4,处理时钟为40 MHz时 ,高速时钟设置为160 MHz,则0.4 μ s 在资源占用方面,由于资源的复用和阶梯式累加的应用,资源消耗比改进之前大大降低。而由于实时处理,使流程中需要存储的单个对象数据量较小,可最大限度地利用FPGA内部的存储空间,仅用很少的BlockRAM即可实现每秒4万以上个脉冲相位信息的存储。 本文设计的测向流程占用FPGA资源较低,测向速度快,可适应性较强,不仅可应用于IFF信号和塔康、航管信号的测向,还可应用于雷达信号、Link16信号等多种脉冲信号的测向处理。本流程也适用于某些可看作超宽脉冲的突发通信信号。 在实验室通过信号源模拟产生IFF应答射频信号,IFF应答信号脉宽为0.45 μ s,信号产生的频率设定为1 s产生200个信号(即PRI=5 ms)。信号处理的实际采样率为40 MHz。使用的FPGA芯片为Xilinx公司的xc5vsx95t。图4中通过FPGA调试工具Chipscope显示FPGA内部测向结果,图5通过显控软件显示综合处理结果,包括信号的类型、幅度、编码、关联结果和插值处理后的测向结果等。 图4 IFF应答信号测向Fig.4 DOA estimation of transponder signal 图4分别显示了IFF应答脉冲信号的脉冲检测结果和测向结果。在无移相处理的情况下,测向结果为90°,图中第一行为脉冲到达标识,第四行为测向结果输出标识,第五行即测向结果。可以看出,测向结果在脉冲前沿到达后的100个时钟内输出,验证了该模型在3 μ s内即可得到测向结果的结论。 图5 脉冲信号处理显示Fig.5 The display of processing result 图5(a)、(b)、(c)分别显示了信号源分别模拟输出模式1、2、3、C询问信号和编号为 2262的应答信号以及频率为962 MHz塔康信号的处理情况,可看出,脉冲间隔参数(PRI)测量误差在纳秒量级,信号模式识别正确,测向结果稳定,从信号个数可以反映出信号正确截获和关联概率达到了90%以上。 表1展示了本文测向流程在实际工程应用中的测向结果。从表中可看出,本文所设计改进的测向流程具有较高的测向精度。多次试验和工程应用结果表明测向精度可达到2°(RMS)以内。 表1 实际测向结果Table 1 The practice result 表2为整个测向流程在FPGA Xinlix V5SX95T中的资源占用情况,可看出虽然整个FPGA实现了图1所示的信号分析、测向、建库以及必要的接口控制等功能,但由于合理的模块复用,资源占用仍然较少。 表2 FPGA资源占用情况Table 2 Device utilization summary 本文基于FPGA硬件平台,根据敌我识别和塔康信号特点,设计了一种占用资源少的实时高精度相关干涉仪测向模型,实现了对IFF、TACAN和航管信号等不同脉宽脉冲的快速实时高精度测向,为目标侦察监视、定位和态势获取工作提供了基础,具有较好的工程应用价值,能较大提高敌我识别信号和塔康信号侦测的效能。本文所设计的测向模型目前已在某实际工程项目中得到应用和证实。 本文的下一步工作是继续对复杂电磁环境下的敌我识别和塔康信号测向进行研究,以降低复杂电磁环境对测向的不良影响。 [1] 陈非凡,苑京立.国外敌我识别技术的现状及发展趋势[J].电讯技术,2001,41(2):5-10.CHEN Fei-fan,YUAN Jing-li.New Developments on IFF Technology[J].Telecommunication Engineering,2001,41(2):5-10.(in Chinese) [2] 董海.MarkXII IFF信号一体化处理技术[J].电讯技术,2011,51(6):39-42.DONG Hai.Integrative Processing Technique for Mark XII IFF Signal[J].Telecommunication Engineering,2011,51(6):39-42.(in Chinese) [3] 钱眺,茅玉龙,查荣.IFF信号的分析与识别研究[J].雷达与对抗,2008(3):45-48.QIAN Tiao,MAO Yu-long,ZHA Rong.A study on the analysis and identification of IFF signals[J].Radar&ECM,2008(3):45-48.(in Chinese) [4] 韩广,王斌,王大磊.基于FPGA的相关干涉仪算法的研究与实现[J].电子技术应用,2010(7):76-80.HAN Guang,WANG Bin,WANG Da-lei.The research and realization of correlation interferometer direction finding algorithm based on FPGA[J].Application of Electronic Technique,2010(7):76-80.(in Chinese)3.3 扩展应用
4 试验情况

5 结 论
