修井机起升系统的机电液联合仿真方法
2012-08-20吴修德长江大学机械工程学院湖北荆州434023
吴修德 (长江大学机械工程学院,湖北 荆州434023)
苏一凡 (中海石油 (中国)有限公司湛江分公司生产部,广东 湛江524057)
吴文秀 (长江大学机械工程学院,湖北 荆州434023)
修井机的起升系统担负着起升与下放钻具、钻头进给、钻压控制、处理井下复杂事故等工作,主要由绞车、天车、游车以及钻杆等部分组成,在绞车中常采用液压盘式制动器构成制动控制系统。修井机起升系统的制动控制是典型的机电液一体化控制。通过系统仿真分析可以获得起升系统的动态性能[1,2]。为了提高系统仿真分析的效率,笔者构建了修井机起升系统的机电液多领域的联合仿真分析方法。
1 机电液联合仿真总体方案
以XJ250修井机的起升系统为研究对象,通过实体建模软件PRO/ENGINEER和机械系统动力学仿真分析软件ADAMS,建立包含液压盘式刹车在内的起升系统的动力学简化模型,对提升工况、下入工况的工作制动和紧急制动过程进行动力学仿真,可以得到起升系统各关键元件所承受的动载荷大小及其变化规律。利用AMESim软件液压系统建模的优势,建立液压盘式刹车的精准模型,然后用采用AMESim和 Matlab/Simulink联合的方法,建立液压盘式刹车制动系统的联合仿真模型,通过 Matlab/Simulink和AMESim联合仿真,可分析或验证起升系统的制动控制性能。修井机起升系统的机电液联合仿真的总体方案如图1所示。

图1 联合仿真总体方案示意图
2 机电联合仿真
利用ADAMS的Controls模块,可以将复杂的控制添加到机械系统的样机模型中,实现机械系统仿真分析工具与控制系统仿真软件有机连接,便于对系统进行整体分析。主要的建模步骤:①在Matlab程序中输入ADAMS模块;②在Matlab/Simulink模块中设置仿真参数 (采用PIPE (DDE)交互访问默认方式);③利用Simulink工具进行控制系统建模。在进行控制系统建模时,要考虑下入工况的变加速段和匀加速段。钻柱杆主动力矩为常数,工作钳刹车力矩变化与时间有关,利用阶跃函数来表示其由平衡状态力矩增加到最大力矩。当角速度等于0时,系统仿真结束,需要在Simulink中添加一个比较器 (Relational Operator)。
在Simulink中建立的修井机起升系统机电联合仿真模型如图2所示。
输入为工作钳制动矩为随时间变化的信号,输出为角加速度大小,通过积分计算并考虑初始条件可得速度与角位移仿真结果。当系统的运动学、动力学分析存在多种影响因素以及要求输入复杂方程和信号 (如,不规则曲线及复杂周期函数)时,利用ADAMS软件进行仿真,添加往往比较麻烦,不容易更改;而通过与Simulink联合仿真,易于实现初始条件的更改及复杂控制信号的输入,并可在交互模式中动态观察仿真结果。
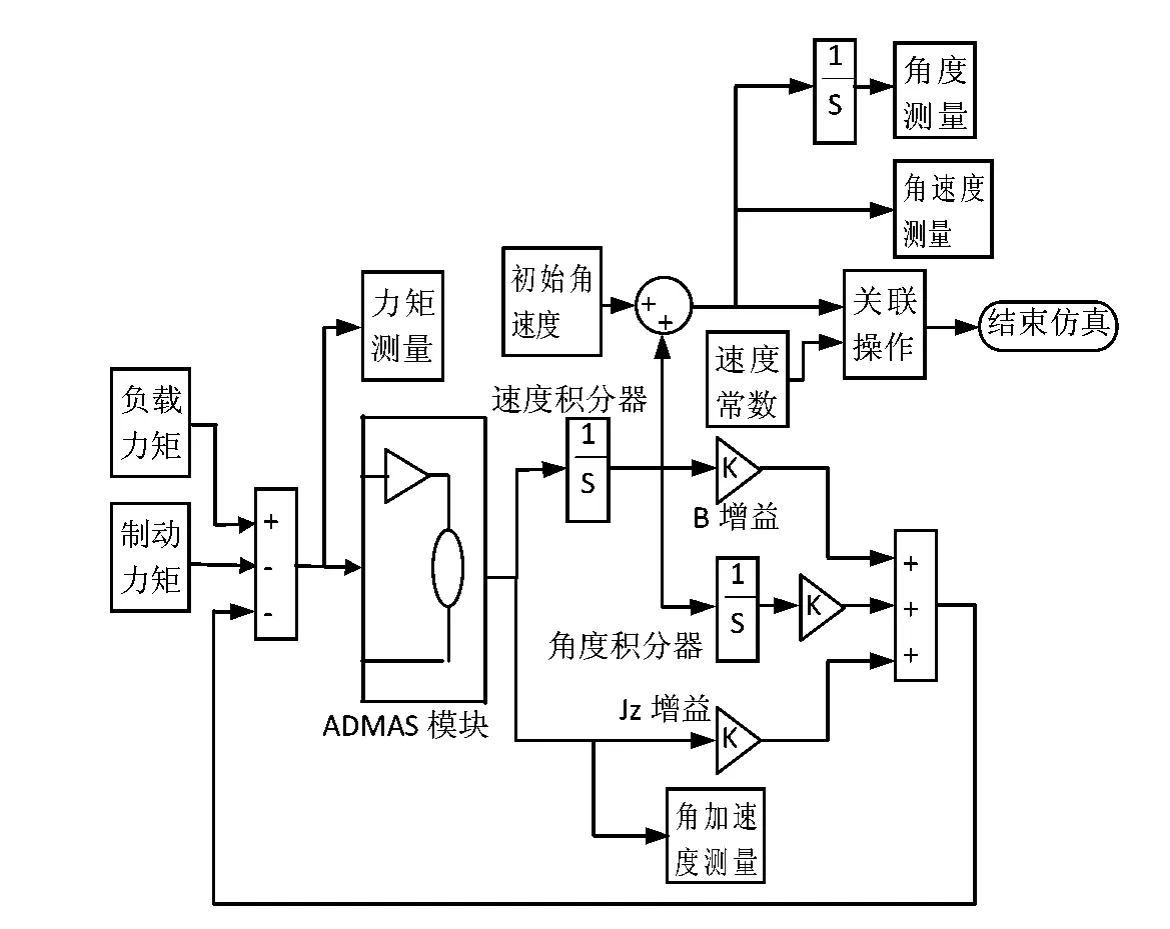
图2 机电联合仿真模型
3 机液联合仿真
ADAMS和 AMESim的软件接口 (ADAMS-AMESim Interface)包含了系统动力学模型与液压模型发生联系的相关状态变量与参数,可以实现复杂系统的ADAMS动力学模型与AMESim液压模型之间的实时数据传递,将动力学仿真与液压系统仿真联合起来。
图3所示为修井机起升系统的液压盘式制动器的机械、液压系统联合仿真模型。力矩传感器将刹车系统的接触正应力转化为工作钳制动力矩信号,然后与钻柱等的主动矩做差分运算,通过力矩产生器作为输入力矩输入到ADAMS运动学模型中;利用信号的差分、比例及饱和运算,建立了输出系统角速度与输入压力调节阀信号的实时变化关系。通过ADAMS与AMESim联合仿真,可以观察在盘式刹车的液压力作用下绞车系统运动情况,进而可随时了解起升系统的制动性能,并可方便地改变液压模型系统参数来对比仿真实验结果。
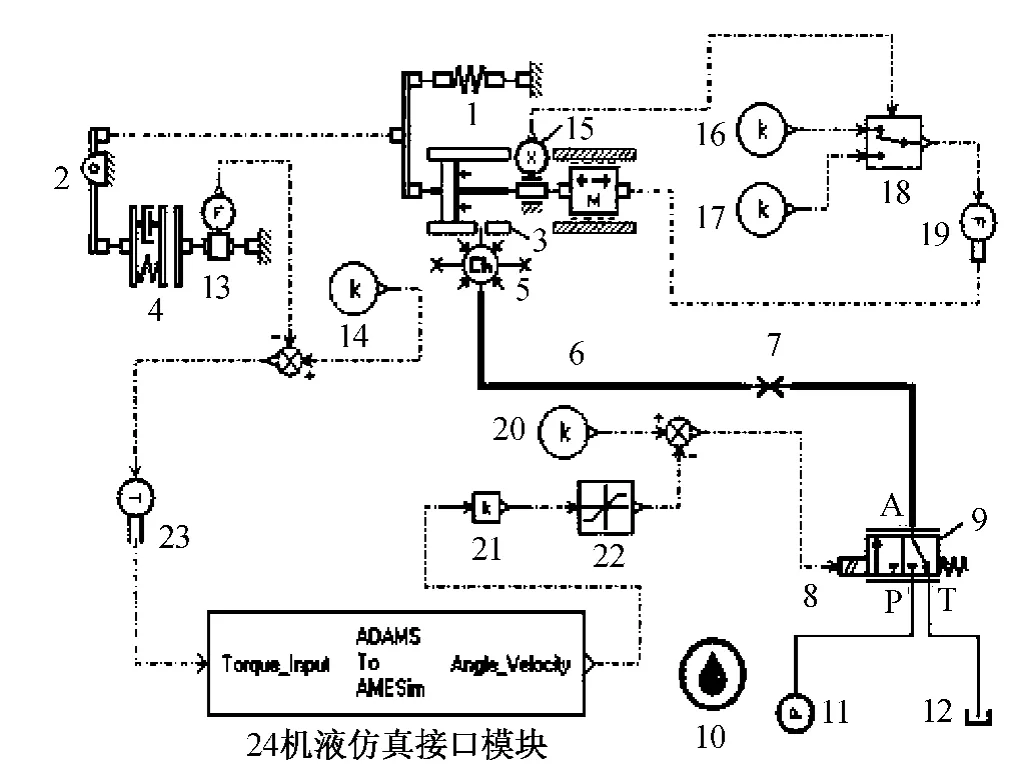
图3 盘式刹车机液联合仿真模型
4 电液联合仿真
液压盘式刹车既包括液压部分又有控制部分,如果单纯利用Simulink进行液压系统建模及仿真,需做较多简化工作,仿真结果误差较大,系统将会变得非常复杂。而将液压盘式刹车的液压部分在AMESim中仿真,控制部分利用Simulink仿真,采用AMESim提供的接口将2个仿真联合起来,既发挥了AMESim突出的流体机械的仿真效能,又可借助MATLAB/Simulink强大的数值处理能力,使系统的仿真效果更加完善。
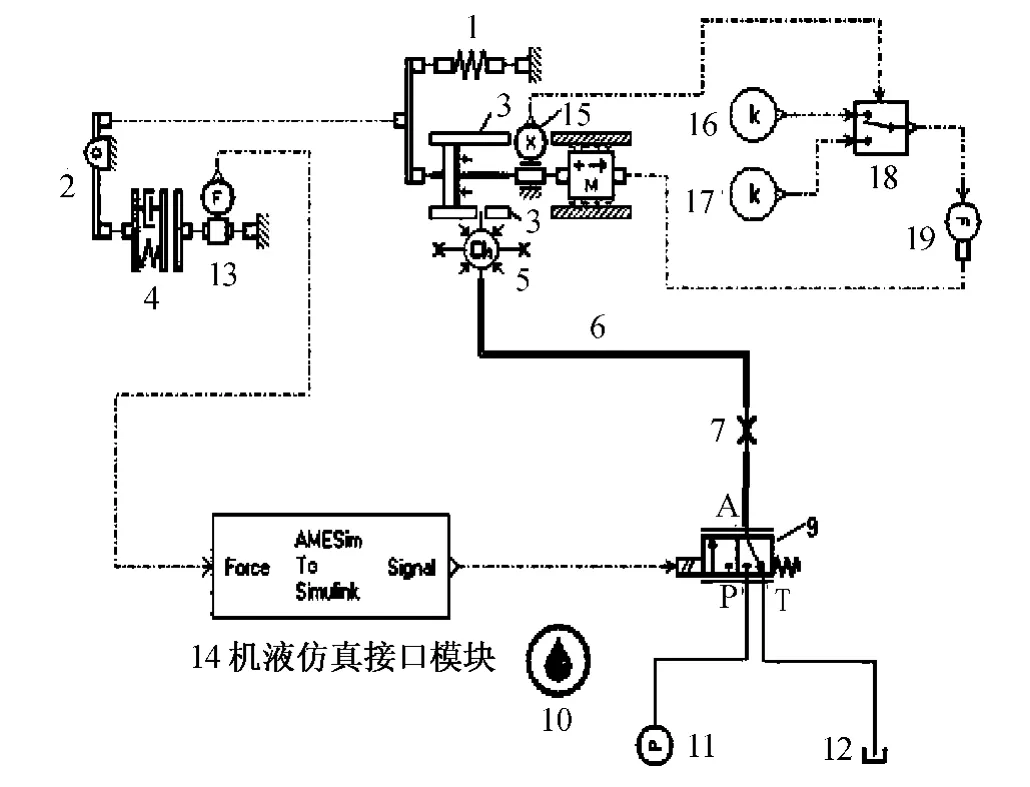
图4 AMESim环境下的液控系统模型
在AMESim中经过系统编译、参数设置等生成供Simulink使用的S函数,在Simulink环境中将建好的AMESim模型当作一个普通S函数来对待,加入系统的Simulink模型中,从而实现二者的联合仿真。
根据盘式刹车系统的物理模型,可将其分为液压系统模型和控制系统模型2个部分,其中液压模型在AMESim环境下构造,而控制模型部分则在Matlab中完成。在AMESim环境下的液压系统模型如图4所示。其中,13为接触正应力传感器,14为液控联合仿真模块。
盘式刹车液压系统在Simulink环境下的反馈控制系统模型如图5所示。通过Simulink中的S功能模块将AMESim产生的S函数加入到Simulink的模型中,同时也将Simulink中的控制算法模型连接到AMESim中的控制模块内。
通过在AMESim中建立输出接触正应力与输入压力调节阀电流信号关系,可搭建盘式刹车液控联合仿真模型。采用AMESim和Simulink联合仿真,可以获得刹车盘制动正压力大小,并可将其作为反馈信号,来调制压力调节阀的控制信号,从而构成力反馈控制系统,便于对液压盘式刹车系统进行制动性能分析,并有助于获得理想的压力调节阀控制信号。
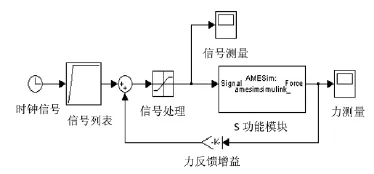
图5 Simulink环境下的控制系统模型
5 结 语
通过引入机电、机液及液压与控制系统联合仿真方法,构建修井机起升系统的联合仿真模型,可以较方便地获得起升系统各环节的特性参数及其变化规律,有助于更加真实、准确、有效地研究液压盘式刹车制动过程的动态特性,并获得有效的系统控制方案,为盘式刹车系统的性能分析与优化、控制算法的测试、故障预测与诊断等奠定了基础。
[1]董怀荣,王联合,李海营,等 .交流变频电驱动钻机起升系统的模拟 [J].石油钻探技术,2009,37(3):69~73.
[2]王瑜,林立,姜建胜 .基于AMESim液压盘式刹车系统建模与仿真研究 [J].石油机械,2008,36(9):31~35.
