车载感知与智能终端的硬件设计*
2012-08-20石存杰余节发
刘 军,石存杰,余节发
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
随着汽车电子产业的高速发展,作为汽车可选装备的智能车载终端已经逐渐普及起来,在一些高档汽车上已经作为必要部件。但是国内车载终端的开发还处于实验性阶段,相对滞后,目前还没有一款真正集成的车载信息感知和智能车载终端相结合的设备。
本文设计了是车载感知和智能终端,扩展了传统的车载信息智能终端的功能。通过运用当前流行的控制器局域网 CAN(Controller Area Network)总线技术,实现对分布式车载传感器信息的采集以及与终端的通信,通过终端对数据的分析处理可以对潜在危险发出报警信号,并在屏幕上显示报警信息,可以对驾驶员起到预警作用。此外还设计了CAN控制器/收发器块、GPRS无线通信、GPS卫星导航以及电源调节等模块,扩展了传统智能车载终端的应用,提高ARM板的利用效率。
1 系统硬件设计
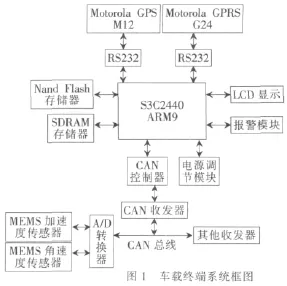
车载感知与智能终端硬件主要由中央处理器单元、GPS模块、GPRS模块、CAN控制器/收发器模块、存储器模块、LED显示模块、A/D转换器模块、传感器模块、电源调节模块和报警模块等组成,系统的总体框架设计如图1所示。
1.1 中央处理器单元
在车载终端系统中,ARM作为中央处理单元对系统的整体性能起着至关重要的作用。本系统选用了Samsung公司基于ARM9内核的S3C2440作为中央处理器,具有很高的性价比[1]。S3C2440可将系统组成缩减至最小,其集成了分开的16 KB指令/数据缓存、SDRAM控制器、LCD控制器、4通道 DMA、3通道 UART、I2C总线、I2S总线、SD主机接口、PWM定时器、看门狗、片上 PLL时钟发生器、8通道10 bit A/D控制器和触摸屏接口、摄像头接口以及带日历函数的实时时钟,并且S3C2440最高频率可达400 MHz,且功耗只有mW级。
1.2 GPS模块
GPS接收模块采用Motorola GPS M12接收模块。M12模块支持Motorola二进制格式和NMEA0183格式两种数据输出模式[2]。它的特点是:超低功耗、高灵敏度,它的卫星信号漂移小,通过天线接收来自GPS卫星的定位信号,经过变频、放大、滤波等一系列处理过程,实现对GPS卫星信号的跟踪、锁定、测量,产生计算位置的数据信息。该模块通过串行口RS232与 S3C2410进行通信。
1.3 GPRS模块
GPRS无线通信模块采用Motorola G24,该模块是一款高速GSM/GPRS/EDGE模块,支持4频850/900/1 800/1 900 MHz,它以先进的技术稳定地实现了M2M的高速无缝连接。G24内置TCP/IP协议栈,并能适应恶劣的工作环境。G24与S3C2440A之间通过串行口2进行通信,通过在ARM嵌入式系统中建立TCP/IP以及PPP等网络协议栈实现与监控中心的信息交互。
1.4 CAN控制器/收发器模块
在S3C2440芯片上没有CAN控制器,所以需要在芯片外部扩展CAN控制器和收发器。SJA1000是一款独立的CAN控制器,广泛应用于汽车和一般工业环境中的控制器局域网络。它是Philips公司PCA82C200控制器的替代产品,支持CAN2.0A、CAN2.0B协议,与仅支持CAN2.0A的PCA82C200在硬件和软件上完全兼容,因此本设计选用SJA1000。
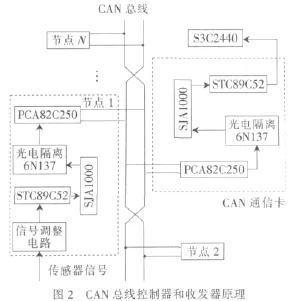
CAN收发器是CAN协议控制器和物理总线之间的接口,为总线提供差动的发送和接收功能,是CAN系统中的必须设备。该智能终端选用常用的CAN收发器并具有PCA82C250作为CAN控制器SJA1000与CAN总线之间的接口,实现对总线的差动发送和对CAN控制器的差动接收,它最初为汽车高速通信(最高达1 Mb/s)应用设计。PCA82C250与ISO/DISI1898标准完全兼容,具有抗瞬间干扰、降低射频干扰、热防护、防护电池与地之间发生短路等总线保护能力,最多可连接110个节点,即使某个节点掉电也不会影响总线。为了加强CAN节点的抗干扰性能,本文在CAN控制器和收发器之间增加了光电隔离器6N137。CAN总线控制器和收发器的设计原理如图2所示[3]。
1.5 A/D转换器模块
本设计选用的 MAXl224/MAXl225系列 12 bit模/数转换器(ADC)具有低功耗、高速、串行输出等特点,其采样速率最高可达1.5 Mb/s,在2.7 V~3.6 V的单电源下工作,需要1个外部基准源;可进行真差分输入,比单端输入提供更好的噪声抑制、失真改善及更宽的动态范围;同时,具有标准 SPITM、QSPITM、MI-CROWWIRETM,接口提供转换所需的时钟信号,可以方便地与标准数字信号处理器(DSP)的同步串行接口连接。
1.6 LED显示模块
S3C2440内部集成了LCD控制器,支持STN和TFT类型的液晶显示器,可根据水平和垂直像素、数据线宽度和刷新率编程支持各种需求的屏幕。LCD控制器主要负责传送在帧缓冲区中的视频数据和产生必要的控制信号。视频数据采用DMA方式,通过LCD数据总线vD[23:0]传送。控制信号主要有垂直同步信号 vSYNC、线结束信号 LEND、水平同步信号 HSYNC、像数时钟信号vCLK和数据使能信号vDEN等。
1.7 传感器模块
MEMS(Micro Electronic Measurement System)传感器具有体积小、质量轻、响应快、灵敏度高和易生产等特点,并具有低能耗、高功率、低成本等优势,特别适合在汽车上使用[4]。所用的微惯性测量单元MIMU由2个ADXL203型双向微加速度计和3个ADXRS150型角速度陀螺组成,MEMS陀螺传感器采用的物理现象是科里奥利效应[5],加速度计和角速度陀螺的布置如图3所示。

立方块代表双向加速度计,圆柱体代表角速度陀螺。要求3个角速度陀螺安装在3个正交平面上,它们敏感轴相互垂直,组成测量体的三维坐标系。2个双向加速度计安装在另外两个面上,为了保证加速度计的敏感轴也组成三维测量坐标系,要求测量垂向加速度的两个敏感轴相互平行,剩下的一个底面作为MIMU与汽车质心处的安装固定平面。
围绕MEMS惯性加速和角速度传感器,开展以驾驶员操控行为动作和车身运动状态感知为核心内容的汽车分布式感知技术研究及其平台开发,设计驾驶员手与脚对车辆操控行为的感知模块、车身运动感知模块。通过建立复杂的理论模型,结合汽车姿态传感模块的信息,运用信息融合技术识别得到可靠的驾驶员对汽车动力学系统的输入参数,包括方向盘输入、油门踏板输入、变速手柄输入、制动踏板输入及离合器踏板输入等。
2 系统软件设计
2.1 软件平台
本方案采用WinCE作为嵌入式操作系统。WinCE是微软公司专门为信息设备、移动应用、消费类电子产品等领域而开发的嵌入式操作系统,它包括如下几个模块:内核模块、设备管理模块、文件系统模块、图形及窗口事件模块、网络及通信模块、设备驱动模块和OAL模块等,图4所示是WinCE操作系统的基本结构。
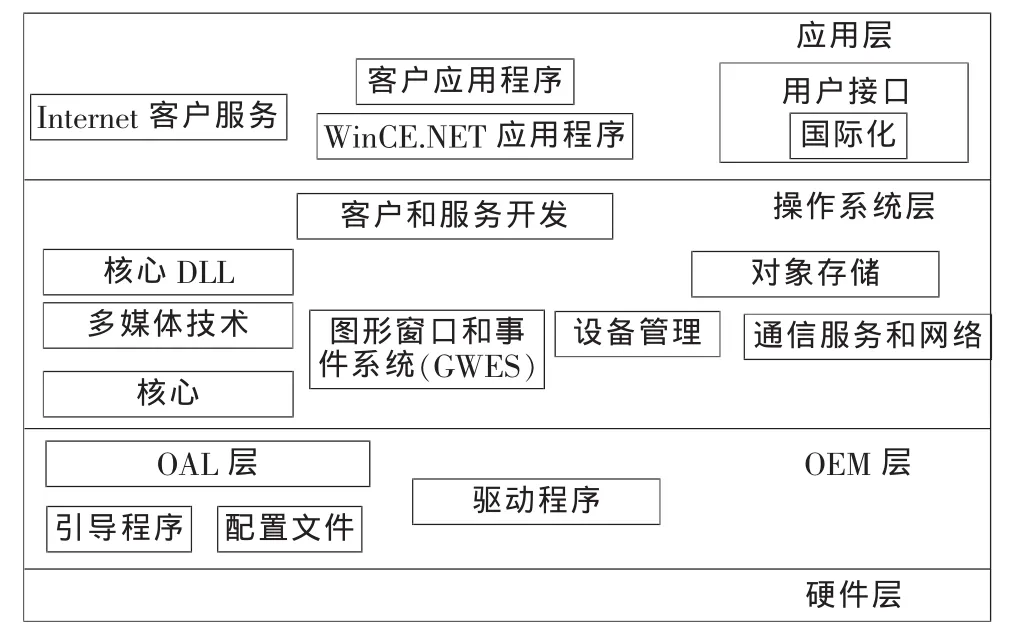
图4 WinCE基本结构
2.2 应用软件设计
模块间的通信主要是通过串口进行的,因此本设计给出了主要的在WinCE下对串口操作的概要描述。
(1)打开串行口
打开串行的程序为:(TEXT(“COM1:”),GENERIC_READ │ GENERIC_WRITE,0,NULL,OPEN_EXISTING,0,NULL),其中端口号 COM1后的冒号是必需的,它用于区别在Windows NT或Windows 98中对设备驱动程序的命名规则。
(2)配置串行口
串行口的配置是用改变DCB结构配置来实现的。应用程序可以通过函数GetCommState获得缺省配置,并用函数SetCommState来进行新的配置[6]。配置串行口程序为:
(3)读/写串行口
读、写串行口使用函数ReadFile和WriteFile,其参数配置基本相同。需要着重指出的是,因为WinCE不支持重叠的I/O操作,所以主线程或是任何创建窗口的线程不能试图向串行口写大量数据,这样线程将会被阻塞,从而不能管理消息队列。应用程序可以通过创建多个线程处理读/写操作来模拟重叠I/O。为了协调多个线程,可以调用WaitCommEvent函数阻塞线程,直至发生指定的通信事件。
(4)关闭串行口
关闭串行口程序如下:
本文基于嵌入式ARM平台,重点设计了车载感知和智能终端的硬件电路部分,突破传统的智能车载终端的功能局限,创新地结合智能终端这一载体,巧妙运用MEMS传感器设计了驾驶行为感知和汽车运动状态监测系统,为利用ARM研究车载感知提供了硬件设计思路,对进一步开展车载感知和智能终端的开发具有探索意义。
[1]Samsung公司.S3C2440A 32-bitRISC microprocessor user′s manual, revision 0.12[Z].2004.
[2]Motorola Inc.Motorola GPS product—oncore user′s guide(rivision5.0)[M].USA:Motorola Inc,2002.
[3]冯桑,康迂福,康林权.基于CAN总线的车载智能终端硬件设计[J].公路与汽运,2010(141):27-30.
[4]VERMAR, GOGOIBP, MLADENOVICD.MEMS Pressure and Acceleration Sensors for Automotive Application [C].SAE 2003 World Congress&Exhibition,2003-01-0204.
[5]闫子波,魏鸣.微机械陀螺仪的工作原理及其应用[J].电子设计技术,2009(9):62-65.
[6]穆斌,罗珣.智能化车载信息终端的设计与实现[J].徽工程科技学院学报,2004,19(3):46-49.