基于外骨骼机器人技术的人体手臂震颤抑制的理论和方法
2012-08-18孙建向馗高理富李涛葛运建
孙建,向馗,高理富,李涛,葛运建
(1.中国科学院合肥物质科学研究院,安徽合肥 230031;2.武汉理工大学自动化学院,湖北武汉 430070)
基于外骨骼机器人技术的人体手臂震颤抑制的理论和方法
孙建1,向馗2,高理富1,李涛2,葛运建1
(1.中国科学院合肥物质科学研究院,安徽合肥 230031;2.武汉理工大学自动化学院,湖北武汉 430070)
介绍国内外利用康复医疗机器人技术和信号处理技术对人体手臂震颤进行抑制的主要研究成果,重点阐述基于“非药物”途径抑制人体手臂震颤的几个关键研究问题:1)震颤现象及其发生机制;2)常见震颤疾病的治疗现状;3)震颤信号的检测、分析、处理以及工程建模方法;4)基于康复机器人技术的手臂震颤抑制策略;5)震颤抑制效果的评估研究.并且重点介绍利用基于傅里叶变换的信号处理技术对震颤信号进行采集、处理与分析的研究现状,以及利用康复医疗机器人技术对震颤信号进行补偿与抑制的相关策略的研究现状分析,探讨“非药物”途径抑制人体手臂震颤的若干难点,为今后的研究工作奠定了基础.
震颤;抑震机器人;希尔伯特-黄变换;EMD分解;信号处理
震颤行为是中老年人手臂的常见现象,是人体某个或多个功能区肌肉的节律性、近似正弦往返摆动的肢体运动,是关节周围肌肉收缩和松弛的动力状态[1].震颤广泛存在于多种疾病之中,是最常见的运动障碍之一.调查表明,在总人口中,约10%存在不同程度和类型的震颤现象,60岁以上的老年人中约有38%的人存在不同程度、不同类型的震颤[2-3].帕金森氏病是导致震颤的常见疾病,近20年呈高发趋势,每10万患病人数中,西方为106~307人,亚洲为44~82人,非洲为31~58人.其中39岁以下者发病占10%,40~49岁为20%,50~59岁为40%,60岁以上人群中患病率约达1%,其病因至今尚不明[4].震颤常见于人的肢体特别是手臂,影响精细动作、书写和用餐,严重时可对病人的日常生活、工作、社会交往等带来诸多不便.尽管震颤本身不能危害生命,但是它对人们的正常运动造成很大的影响,65%的震颤患者不能进行正常的日常生活.另外,震颤患者的特征还表现为肌肉僵硬、步态慌张、动态迟缓,而这些特征经常被误认为是老年人的正常表现,因此容易延误治疗[4].
在医学领域,国内外对震颤的研究已有多年,但大多数类型的震颤运动的机理和起源至今尚未明确[5],通过“对症下药”的方法在目前的医学水平下显得“力不从心”.在较短时间内开发出抑制患者震颤的普适性药物比较困难,而震颤带给患者的诸如精细动作、手写和用餐等日常生活的不便问题在短期内难以解决.因此,尝试利用新途径(非药物治疗)对震颤运动及其抑制开展的研究便显得非常有意义.
1 震颤及其研究现状
1.1 震颤及其临床分类
震颤是人体某一个或多个功能区肌肉的有节律性、近似正弦往返摆动的肢体运动,是关节周围肌肉收缩和松弛的动力状态.作为最为普遍的运动障碍之一,震颤本身是人体运动神经元异常同步化的结果[6-7].现行的分类系统主要包括 2 种[3,7],一种是依据震颤肢体活动状态的行为学分类,另一种是根据基础疾病的病因学分类.目前,国际上更加侧重于后者.从病因学的角度分析,震颤主要包括两大类[8]:生理性震颤和病理性震颤.生理性震颤是伴随患者肢体正常运动的小幅度震颤,是运动启动和终止过程中不可缺少的组成部分,其作用是使整个运动系统处于一个不断运动的振荡状态,从而达到调节运动的目的.根据震颤的病因学特点,并考虑到震颤频率、震颤诱发因素、既往史、家族史和神经体征等,将病理性震颤分为如下类型[2,9]:生理性震颤、增强的生理性震颤、特发性震颤、帕金森震颤、小脑性震颤、红核性震颤、精神性震颤和药物毒物诱发的震颤.病理性震颤的病理机制比较复杂,不同类型的病理性震颤存在各自不同的生理机制,其本身影响患者肢体运动的协调.
1.2 震颤起源及其发生机制
人类对于震颤的研究可以追溯到1886年Schafer等发现震颤现象,从那时起,有关于生理性震颤的研究就引起了广大研究者的兴趣并伴随大量的争论[10].大多数研究者认为,生理性震颤的研究能够对神经肌肉控制机制的研究提供一些线索,而对于生理性震颤机制的彻底澄清有助于阐明很多病理性震颤的起源.Lippold研究表明,用于使肢体保持姿势的反射机制可能会对生理性震颤的发生起到重要作用[10-11].在 Lippold 的研究基础上,Stein 参考了肌肉的特征和感觉反馈通路(sensory feedback pathways),设计了一种确定性模型,用于描述运动神经元的激活函数,进而估计震颤源[12-13].Stein 是能够用实验证明反馈机制对于生理性震颤起作用的众多研究者之一,其研究表明,由于肌肉和惯性载荷的交互作用,在感觉反馈通路缺失的情况下,肌肉会产生阻尼振荡.Timmer是另外一名投入大量精力研究震颤发生机制的学者.他利用互谱分析(cross-spectral analysis)来研究反射机制在生理性震颤中的作用,其研究表明,生理性震颤可以被描述成线性随机过程,而病理性震颤可以描述成非线性过程[14-15].另外,Timmer引入一种随机反馈系统,该系统利用一种反曲非线性函数描述运动神经元的激活函数,研究结果证明,反射机制确实有助于震颤运动的发生,在一定程度上能够改变震颤运动的频率、放松时间和振幅[15-16].因此,Timmer认为,造成生理性震颤的主要原因是手臂的共振行为和由运动神经元募集反应引起的肌电同步活动.但是,并没有充足的证据能够证明反射机制是造成震颤运动的首要原因.
综合来看,尽管目前国内外对震颤的研究进行了很多年,对各种震颤可能的产生机制有所了解,但大多数类型震颤的发生机理和起源至今尚未明确.从已有的文献来看产生震颤可能的机有制[9,15]:1)肢体的机械震颤,这种机制是导致震颤的最简单的诱发因素,类似于物理学的机械性共振.2)中枢神经系统的反射.人身体某部分方向的屈肌运动将拉伸伸肌,导致一系列传入冲动,引发拮抗肌的牵张反射.伸肌激活的同时,屈肌将被拉伸,来自屈肌的大量传入纤维进入中枢系统,产生屈肌的反射活动.当发射存在并且传入和传出神经的传导时间适宜时,将产生震颤.理论上讲,传导距离越长,震颤频率越低.3)中枢振荡器的存在假说.4)前馈或反馈系统紊乱.临床上,医生在诊断患者震颤疾病时,除了参考以上4种机制之外,还要考虑震颤频率、震颤的诱发因素、既往史、家族史和神经体征等.因此,震颤患者的诱发病因和发生机理的研究,需要涉及多方面的考察因素,而各种不同类型的震颤运动的起源更是众说纷纭,无法统一.
1.3 常见震颤疾病的治疗现状
常规药物治疗是目前治疗震颤运动疾病的主要手段.由于目前引起震颤运动的机理和起源尚未明确,对其治疗大多采用探索性方式,无法从根本上治愈.例如,用于治疗特发性震颤(ET)的常见药物有普萘落尔(propranolol)、美多洛尔(metoprolol)、阿罗洛尔(arotinolol)等[17].普萘洛尔为肾上腺 β2受体阻断药,主要抑制β2受体(β2受体与震颤有密切关系,且疗效与剂量密切相关,一般从小剂量递加,分3次服用才见效果),副作用主要表现为心率降低、支气管痉挛、抑郁、疲乏等.美多洛尔为选择性β受体阻断药,易透过血脑屏障,但仍然有诸如减慢心率等副作用.阿罗洛尔兼有α、β2受体阻断作用,因可阻断骨骼肌β2受体,亦可治疗ET,其副作用表现为头晕、胸闷、面部麻木,偶尔对正常血压稍有降低,但仅发生在少数患者中[17].目前对于帕金森氏疾病引起的震颤,可用3种方法进行治疗[18]:1)药物治疗,例如左旋多巴、息宁、金刚烷胺、溴隐亭与培高利特,这些药物虽能使震颤患者的临床症状在一定时间内获得一定程度的好转,但都存在不同程度的副作用(恶心呕吐、异动症、幻觉、体位性低血压、疲乏等);2)外科治疗,例如通过立体定向切除苍白球的后腹侧部(苍白球切开术)可显著改善“关”状态下的动作过缓以及左旋多巴诱发的动作困难;虽然实验证明这种方法能较明显地提高该病的临床缓解率,减少了副作用,但也存在价格昂贵、适应症严格、疗效尚难肯定等问题;3)物理治疗,重要的是要让病人尽可能保持各种活动,但是目前还未见商用的抑制人体震颤运动的康复装置的有关报道.
总体来说,常规药物是目前治疗震颤运动疾病的主要手段.该方法虽能使震颤患者的临床症状在一定时间内获得一定程度的好转,但不能阻止引起震颤疾病的自然发展,且各种药物都有不同程度的副作用,因而限制了其自身在临床上的应用,致使患者的震颤疾病无法从根本上治愈,而患者的生活不便问题短期内无法得到有效解决.
2 震颤信号采集及其处理方法
日常生活情况下,震颤患者所做的运动基本都包括2种类型的运动:正常运动和震颤运动.这样,传感装置所获取的信号中至少包括2种类型的信号:正常运动信号和震颤运动信号.如图1所示,传感器装置所获取的信号是正常运动信号和震颤运动信号的叠加.从数学意义上来说,正常运动信号和震颤运动信号都是时间序列,可以通过诸如频率变化、相位漂移、幅值波动、时刻转换、运动形式变化等特征进行描述.正常运动信号频率较低,一般低于1 Hz.手臂震颤信号的频率一般为2~20 Hz,振幅为100 μm(单方向)[16,19].

图1 正常运动信号和震颤运动信号Fig.1 The voluntary movement signal and the tremor signal
从本质上来说,震颤信号本身是多频率、实变的复杂非平稳信号,其频率的统计特性随时间变化.研究人体手臂震颤抑制措施,首要工作就是探索一种实时、有效的信号处理方法,实现正确区分患者正常运动信号和震颤运动信号的目的.实际上,震颤频率和幅值的分析是研究震颤信号特性的重要手段.随着计算机技术的发展,对反映震颤患者运动参数的加速度信号、电生理变化的肌电信号以及脑电信号等的分析为这些问题提供了一个辅助研究的新途径[20].
近年来,已经有很多关于震颤消除的信号滤波的研究,特别是针对病理性震颤信号的滤波[21-22].大部分的研究工作采用有限冲激响应线性均衡器[23-24]对震颤数据进行训练或者采用低通滤波器方法消除所有频率高于2 Hz的震颤运动信号[25].这些方法虽然在一定程度上能够实现消除震颤的目的,但其自身存在的时间延迟导致其无法实现自适应噪声消除,而低通滤波器无法充分对震颤运动进行建模.
C.Vaz等在最小均方算法LMS算法的基础上,构建了一种自适应滤波器——傅里叶线性组合器(Fourier linear combiner,FLC)算法[26].FLC 是一种自适应的滤波器,在频率已知的情况下,该算法可以有效地估计震颤运动信号,实现震颤运动信号与正常运动信号之间的分离.该算法本身计算量并不很大,可以看作是自适应陷波器.但是,在通常情况下,震颤运动信号频率不是已知的,而是随时间变化的,FLC只能对预知的特定频率的震颤信号处理有效果.Riviere等对FLC算法进行扩展,构造了一种加权频率傅里叶线性变换算法 (weighted-frequency Fourier linear combiner,WFLC)[27-28].像 FLC 算法一样,WFLC算法仍然把震颤信号构建为输入被截断的傅里叶级数的动态模型.但与 FLC不同的是,WFLC不仅调节该模型的傅里叶系数,而且还调节该模型的频率,以使该模型能够与输入信号进行匹配.因此,WFLC比较适合对震颤运动信号的处理与分析.但是,WFLC是建立在震颤运动信号可以被构造成正弦信号模型或傅里叶级数的基础上的,其本身是基于动态截断傅里叶序列的变换,这就导致它自身存在很大的局限性或缺陷:一次只能实现2种频率不同的信号的分离.而通常情况下,震颤运动信号是多频率的非平稳信号,如果要实现不同频率的震颤运动信号的分离,需要多次使用WFLC.另外,WFLC的频域分辨率低.对于2个频率十分接近的信号(频率相差小于0.5 Hz),WFLC将无法很好地实现2种信号的分离,其原因在于,参考信号使用动态傅里叶截断序列,其本身受到Heisenberg不确定原理的限制.
为解决WFLC算法存在的问题,W.T.Ang提出一种有限频带多重FLC(bandlimited multiple-Fourier linear combiner,BMFLC),用于估计具有多种频率的震颤信号.像WFLC一样,BMFLC算法选择正弦信号和余弦信号的线性组合系列作为BMFLC的输入参考信号[28].该算法把所感兴趣的震颤信号的频带进行等分,然后对每份“频带”信号进行FLC处理.与FLC算法相比较,该算法消除了谐振因子,可以区分频率十分接近的信号.与WFLC相比,该算法能够追踪的信号频率更广,同时在频域上的分辨率更大.但是,BMFLC也是基于动态截断傅里叶序列的变换,频域分辨率存在上限.如果2个频率十分接近的信号(频率相差0.3 Hz),BMFLC将无法很好地实现2种信号的分离.
FLC、WFLC以及BMFLC算法各自均含有一定的局限性.在通常情况下,震颤运动信号频率不是已知的,而是随时间变化的.FLC算法只能估计频率已知的准周期信号,并不能有效地模拟震颤运动信号.WFLC虽然可以追踪频率已知的信号,但是可以追踪的频率范围比较小;另外,WFLC的频域分辨率比较小,频率相差1 Hz左右的信号分离效果较差.虽然在给定频带的情况下,BMFLC可以追踪多种频率的调制信号,但是频带的选择影响其计算效果,且BMFLC的计算量较大.
J.Z.Zhang[29]、E.Rocon[30]等分别尝试利用希尔伯特—黄变换技术对震颤信号进行分析与处理,利用经验模态分解把震颤信号与正常运动信号进行分离,然后利用希尔伯特变换对震颤信号进行分析与处理,获取其频率、幅值等信息.但是,他们的研究工作仅仅是利用希尔伯特-黄变换对震颤信号处理进行原理性验证,并没有构建一种实用化的震颤信号处理算法.
总之,现有的处理和分析方法都是在假定震颤运动信号是一种近似正弦信号的平稳性信号的基础上展开研究的,并不能解决复杂非平稳信号的时频分析问题,这就导致现有的方法诸如FLC、WFLC以及BMFLC等算法都存在着自身无法克服的局限性——只能实现对震颤运动信号进行粗略分析或者给出一个总的平均效果,不能描述各频率之间的相互关系,更无法精确获取每一个时刻下的频率,因而无法从根本上实现震颤运动信号与正常运动信号的分离.
3 手臂震颤抑制策略
已有的研究表明,除了常规药物治疗以外,生物力加载技术(biomechanical loading,BL)和功能性神经肌肉刺激(functional neuromuscular stimulations,FNS)技术是抑制震颤运动最为有效的2种措施[30-36].如图2 所示,生物力加载技术是一种物理方法,通过控制机器人产生阻抗运动,产生与患者震颤运动“相反”的运动,试图改变患者手臂的阻抗特性,起到抑制手臂震颤的效果.功能性神经肌肉刺激技术是一种生物方法,通过电刺激技术产生与患者震颤“相反”的运动,控制患者手臂肌肉的收缩特性,起到抑制手臂震颤的效果.

图2 生物力加载技术和功能性神经肌肉刺激技术Fig.2 Biomechanical loading and functional neuromuscular stimulations
3.1 生物力加载技术
生物力加载技术是一种通过外部系统向人体施加机械负载,旨在改变肢体的肌肉-骨骼系统生物力学特性的技术[31].临床试验表明,医师向震颤患者的手臂施加机械负载,可以有效减弱患者震颤的运动状态.但是,患者或者医师虽然可以“定性”地利用生物力加载技术抑制震颤,却无法“定量”地控制震颤减弱的幅度和频率.B.Adelstein等的研究表明,基于机器人系统的生物力加载技术是一种利用机器人技术对震颤患者的震颤部位进行生物力加载的技术手段,通过向神经肌肉系统的外围终端(例如四肢)施加“定量”的机械负载,可以有效改变震颤运动的状态,而这种现象在生理性震颤的实验中尤其明显[31].
对于许多患有多发性硬化或者头部损伤的患者来说,意向性震颤是影响其主动运动的肌肉收缩的主要原因.肘关节屈伸方向的意向性震颤的振幅高达30°,频率在3~4 Hz,通常情况下会使患者无法准确完成自己的主动运动.Rosen等的研究表明,黏性阻尼能够有效地减弱意向性震颤的震颤幅值,并帮助患者重建对肢体的控制功能[32-33].
J.Katovsky等开发了一款可以穿戴的震颤抑制康复装置—— Viscous Beam,能够向患者肘关节的屈/伸运动提供黏性阻抗[33].如图3所示,该装置能够减弱震颤幅度并且体积足够小,能够穿套在衬衫的袖子中.Viscous Beam允许整个拇指和手指运动、肘关节屈/伸运动和前臂的旋内/外运动.该装置通过一个约束层阻尼系统 (constrained-layer-damping,CLD)向患者手臂提供阻尼,值得关注的是该装置能够通过一个小弯曲半径抑制大旋转性,其自身的扰度平板装置能够线性地将腕关节屈/伸运动转化为直线传送.实验证明,该装置能够有效地抑制意向性震颤.另外,J.L.Pons等在此基础上,设计了一种可控的双层Viscous Beam,如图4所示.

图3 Viscous beamFig.3 Viscous beam

图4 双层viscous beamFig.4 Double viscous beam
E.Rocon等[34]开发了一种基于生物力加载方法的可穿戴型手臂震颤抑制装置——WOTAS.如图5所示,该装置是一种三自由度的外骨骼机器人系统,包括3个无刷直流电机系统、外骨骼系统以及惯性传感器系统等.另外,E.Rocon等提出了2种控制策略:一种是通过增加患者手臂弹性、阻尼和质量特征来抑制震颤;另外一种是利用震颤的近似重复特性,设计一种噪音滤波器来抑制震颤.但是,由于所建立的震颤模型的不准确以及传感器无法实时准确检测震颤信号等不可避免的因素的影响,该装置对于某些震颤运动(特别是病理性震颤运动)的抑制具有一定的局限性.

图5 WOTASFig.5WOTAS
针对特发性震颤,W.Jason等研制了双作用阻尼器[37].如图6所示,该装置结构简单、重量轻、阻尼器系数容易调节,可以对人体腕部的屈伸运动中的震颤进行抑制.仿真实验结果也证明该设备对高频的震颤具有一定的抑制作用.

图6 双作用阻尼器抑震系统Fig.6 Tremor suppression with double dashpot
S.S.C.Lavu等验证了一套人体假肢,并使用激振器带动假肢振动以模拟人体的震颤[38].如图7所示,假肢上安装有加速计,对震颤的信息进行测量,控制器根据加速计的反馈信号来输出控制信息,控制与震颤假肢相连的抑震器,实现对震颤进行抑制的目的.实验结果显示,该方法可以有效减小震颤为原来的83.3%.
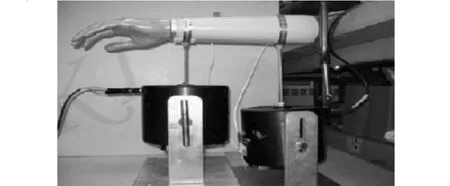
图7 主动震颤控制系统Fig.7 Active vibration control system
作者在国内率先开展基于机器人技术的震颤抑制策略的相关研究工作[35-36],如图 8 所示.
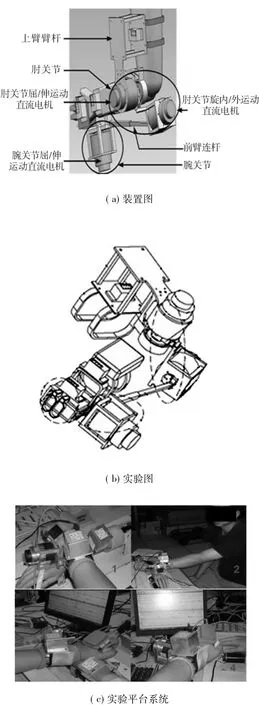
图8 可穿戴型手臂震颤抑制机器人和实验平台系统Fig.8 A wearable robotic exoskeleton for hand tremor assessment and suppression and the experimental platform
图8所设计的可穿戴型手臂震颤抑制机器人包括穿戴型外骨骼系统、震颤激励系统、震颤运动检测系统和信号处理与控制系统.震颤患者进行写字、抬臂等日常活动时,震颤运动检测系统感知手臂运动信息,将震颤运动信息和正常运动信号分离开来,然后控制系统控制直流电机产生幅度相同、相位相反的震颤运动,达到抑制患者手臂震颤的目的.
哈尔滨工业大学机器人研究所研制了一套可调阻尼的穿戴式抑制机器人系统[39].如图9所示,该系统采用磁流变阻尼器来提供可控的阻尼力,通过外加辅助设备进行肘部屈伸和前臂旋转2个方向上的抑震.

图9 抑震机器人Fig.9 A wearable rotot for tremor suppression
3.2 功能性神经肌肉刺激技术
电刺激技术在医学中的应用源于19世纪中期Duchenne等观察到人体肌肉在电刺激下产生的肌肉收缩现象[40].FES本质上利用神经细胞对电刺激的响应来传递外加的人工控制信号,通过外电流的作用,神经细胞能产生一个与自然激发引起的动作电位完全一样的神经冲动,使其支配的肌肉纤维产生收缩,从而获得运动的效果[41].从本质上来讲,FNS技术相当于重建一个人工的运动中枢,并能和周围神经连接成为人工神经的一部分.
A.Prochazka[42]和 M.Javidan[43]是最早开始尝试利用功能性神经肌肉刺激技术来抑制人体手臂震颤的研究者.如图10所示,限于当时的技术条件,所设计的震颤抑制系统的控制系统是基于模拟电路系统的.D.M.Gillard在此基础上,设计了一种基于数字电路系统的震颤抑制系统[44],如图11所示.实验证明,这套震颤抑制控制系统比A.Prochazka等所设计的系统性能更优越,对帕金森氏病患者的震颤幅度的抑制可达到(87.2±1.9)%.
2006年W.T.Ang领导的研究小组也开始尝试利用基于表面肌肉电信号的FNS技术对震颤运动进行抑制[19,45-46].如图 12 所示,他们构建一种基于FNS技术的控制系统,在Hill肌肉模型的基础上,构建肘关节肌肉收缩模型,通过控制电极装置改变肘关节的刚度系数和弹性系数,达到抑制震颤的目的.W.T.Ang等[45]获取的信号主要包括表面肌电信号和加速度传感器信号,提出并设计一种BMFLC算法对震颤信号进行处理[45].如图13所示,通过表面肌电传感器获取患者手臂震颤部位的信号,根据预先制定的肌肉收缩模型和控制算法,产生控制命令,然后通过电极给震颤患者的神经肌肉施加电刺激,使其产生与震颤“相反”的运动,进而实现抑制震颤的目的.不过,根据W.T.Ang等的研究,这种方法存在如下问题:1)控制器过于复杂,导致实时性较差;2)表面肌肉电信号的实时处理比较困难;3)难以正确建立肢体运动与肌电指标或特征之间的映射关系[46].

图10 基于FES技术的震颤抑制系统[42]Fig.10 Tremor suppression system based on FES technology[42]

图11 震颤抑制控制系统[44]Fig.11 The control system of the tremor suppression system[44]

图12 W.T.Ang震颤抑制系统Ⅰ[45]Fig.12 The W.T.Ang tremor suppression systemⅠ[45]

图13 W.T.Ang震颤抑制系统Ⅱ[46]Fig.13 The W.T.Ang tremor suppression systemⅡ[46]
4 震颤抑制效果的评估
震颤抑制装置的抑制效果的评定工作是利用机器人抑制人体手臂震颤需要解决的重要问题之一,使用者是该装置效果的最佳评判者.但是,通常情况下,使用者的评判又过于主观.因此,需要研究一些评价指标,能够客观有效地评估该装置的性能并评定其抑制效果.震颤抑制效果的评估过程需要考虑:1)震颤抑制频率的可选择性,即能否彻底抑制震颤运动,而对正常运动的影响最小;2)零阶延迟,即震颤抑制不存在延迟.
对于震颤抑制效果的评估研究来说,最基本的方法是比较震颤抑制前后信号的均方根值.另外,比较震颤抑制前后的信号能量的大小也可以作为一项评价标准.Rosen等监测目标信号和实际信号相关传递函数的幅值和相位,进而监测震颤减弱的强度[47].Riviere通过从震颤信号抑制前后的信号中抽取正常运动信号,进而计算补偿前后的误差,然后比较未补偿信号和补偿信号的误差均方根值[48].Riviere认为,由于考虑到各种频率下的震颤运动,而不是只考虑震颤频率带宽内的震颤,这种震颤估计方法提供了更加直接的评估.Pledgie等也把震颤运动能量作为震颤抑制效果的评估手段[49].Gonzalez等指出,由于追踪延迟的影响,一些计算追踪误差的标准方法,例如均方误差或者平均绝对误差,会受到严重的干扰[50].例如,在某些情况下,根据所用的目标信号的性质,0.2 s的延迟可以导致均方误差值缩小30%.另一方面,在任何追踪任务中,都不可避免地存在延迟,但这并不能作为震颤抑制效果差的指标.Adelstein等提出,把最大的外部黏性阻抗(max,D)的震颤能量谱密度和自由振荡条件下(D=0)的震颤能量谱密度的比例值作为震颤抑制效果的评价指标,该表达式如式(1)所示[31]:
式中:T(f,D)是震颤功率谱密度,从震颤信号的加权光谱中获得.另外,这些条件光谱仅仅考虑正常运动范围内的频率,即

式中:Mrr(f)是响应记录的功力谱,(f)是一致性因素,fc是截断频率.另外,Adelstein还定义了正常运动和震颤信号的信噪比例R[31]:

信噪比R使正常运动(与目标运动相关)信号的能量与震颤运动信号能量的方差建立了某种联系.较小的震颤方差或者较大的目标追踪能量会使数值R增大,这可以看作是追踪性能优劣的指标.
5 总结与展望
基于机器人技术的震颤抑制措施并不是研究震颤运动发生的本质,而以震颤运动发生的“表象”——震颤信号为出发点,将震颤抑制的研究重点从震颤发生机理、生理诊断和药物治疗等方面过渡到震颤运动信号获取、信号处理与评估、震颤抑制策略与安全性等方面,旨在为震颤运动抑制等方面的研究开拓一条新途径,从而为改进手臂震颤患者的生活质量提供一种新方法.
本文深入介绍国内外利用康复医疗机器人技术和信号处理技术对人体手臂震颤进行抑制的主要研究成果,重点阐述基于“非药物”途径抑制人体手臂震颤的几个关键研究问题:1)震颤现象及其发生机制;2)常见震颤疾病的治疗现状;3)震颤信号的检测、分析、处理以及工程建模方法;4)基于康复机器人技术的手臂震颤抑制策略;5)震颤抑制效果的评估研究.目前的研究现状表明,国内外关于震颤的研究绝大多数集中在患者震颤发生机理与药物治疗等方面,从非药理学角度开展的震颤抑制措施研究相对较少.而目前已有的震颤抑制措施并不能有效解决震颤抑制的问题,在理论研究和实践开发等方面还存在很多未解决的问题.
[1]ELBEL R,KOLLER W T.Baltimore,USA:Johns Hopkins Univ Press,1990:8-14.
[2]曾文双,褚晓凡.震颤的生理机制及其诊断和肌电图特点[J].中国临床康复,2005,9(33):124-127.
ZEN Wenshuang,ZHU Xiaofan.Physiology,diagnosis and feature of electromyogram of tremor[J].Chinese Journal of Clinical Rehabilitation,2005,9(33):124-127.
[3]张淑云,张通.震颤发生机制的研究现状[J].中国康复理论与实践,2003,9(9):530-532.
ZHANG Shuyun,ZHANG Tong.A review of the research work about tremor physiology[J].Chinese Journal of Rehabilitation Theory and Practice,2003,9(9):530-532.
[4]何建成,卫洪昌,袁灿兴,等.帕金森病的发病机理及中西医结合治疗[J]. 甘肃中医,2002,15(5):7-10.
HE Jiancheng,WEI Hongchang,YUAN Canxing,et al.The pathogensis of Parkinsonism and treatment based on integrative medicine[J].Gansu Journal of Traditional Chinese Medicine,2002,15(5):7-10.
[5]VAZ C,KONG Xuan,THAKOR N.An adaptive estimation of periodic signals using a Fourier linear combiner[J].IEEE Transactions on Signal Processing,1994,42(1):1-10.
[6]ROCON E,BELDA-LOIS J M.Pathological tremor management:modelling,compensatory technology and evaluation[J].Technology and Disability,2004,16(1):3-18.
[7]刘道宽.锥体外系疾病[M].上海:上海科学技术出版社,2000:336.
[8]孙丽君,顾平,王铭维.不同类型震颤的临床特点、发生机制及影响因素[J].中国临床康复,2006,10(46):226-228.
SUN Lijun,GU Ping,WANG Mingwei.Clinical characters,pathogenesis and influencing factors of different tremors[J].Chinese Journal of Clinical Rehabilitation,2006,10(46):226-228.
[9]薛鸿,张恩科,黄力宇,等.震颤的工程分析技术价值的初步研究[J].医学信息,2005,18(7):784-786.
XUE Hong,ZHANG Enke,HUANG Liyu,et al.The initial research of tremor’s engineering analysis technique value[J].Medical Information,2005,18(7):784-786.
[10]ANOUTI A,KOLLER W.Tremor disorders:diagnosis and management[J].The Western Journal of Medicine,1995,162(6):510-514.
[11]LIPPOLD O J C,REDFEARN J W T,VUCO J.The rhythmical activity of groups of motor units in the voluntary contraction of muscle[J].Journal of Physiol,1957,137:473.
[12]LIPPOLD O C J.Oscillation in the stretch reflex arc and the origin of the rhythmical,8-12Hz component of physiological tremor[J].J Physiol,1970,206:359.
[13]STEIN R B,OGUZTORELI M N.Tremor and other oscillations in neuromuscular systems[J].Biological Cybernetics,1976(22):147-157.
[14]STILES R N.Mechanical and neural feedback factors in postural hand tremor of normal subjects[J].Journal of Neurophysiol,1980,44(1):40-59.
[15]TIMMER J,PFLEGER M L,DEUSCHL G.Cross-spetral analysis of physiological tremor and muscle activity:theory and application to unsynchronized electromyogram[J].Biological Cybern,1998,78:349-357.
[16]GANTERT G,HONERKAMP,J TIMMER.Analysing the dynamics of tremor time series[J].Biological Cybern,1992,66:479-484.
[17]童萼塘.震颤的药物治疗[J].医药导报,2001,20(5):277-279.
TONG Etang.The medicine treatment for the tremor[J].Herald of Medicine,2001,20(5):277-279.
[18]黄柒金,徐如祥,张世忠,等.帕金森病立体定向治疗并发症的防治[J].立体定向和功能性神经外科杂志,2002,15(2):75-77.
HUANG Qijin,XU Ruxiang,ZHANG Shizhong,et al.Prevent and treat the complication of stereotactic operation for Parkinson’s disease[J].Chinese Journal of Stereotactic and Functional Neurosurgery,2002,15(2):75-77.
[19]VELUVOLU K C,TAN U X,LATT W T,et al.Adaptive filtering of physiological tremor for real-time compensation[C]//Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics.Bangkok,Thailand,2009:524-529.
[20]艾玲梅,黄力宇.震颤信号分析的研究现状及展望[J].生物医学工程学杂志,2007,24(6):1402-1405.
AI Lingmei,HUANG Liyu.The current situation and development of tremor signals analysis[J].Journal of Biomedical Engineering,2007,24(6):1402-1405.
[21]VAZ C,KONG X,THAKOR N.An adaptive estimation of periodic signals using a Fourier linear combiner[J].IEEE Transactions on Signal Processing,1994,42(1):1-10.
[22]GONZALEZ J G,HEREDIA E A,RAHMAN T,et al.A new approach to suppressing abnormal tremor through signal equalization[C]//Proc RESNA Annual Conferrence.Vancouver,Canada,1995:707-709.
[23]PROCHA A,ELEK J,JAVIDAN M.Attenuation of pathological tremors by functional electrical stimulation I:method[J].Annals Biomedical Engineering,1992,20(3):205-224.
[24]RILEY P,ROSEN M.Evaluating manual control devices for those with tremor disability[J].Journal of Rehabilitation Research and Development,1987,24(1):99-110.
[25]OPPENHEIM A V,SCHAEFER R W.Discrete-time signal processing[M].Englewood Cliffs,USA:Prentice-Hall,1989:204.
[26]RIVIERE C N,RADER R S,THAKOR N V.Adaptive real-time canceling of physiological tremor for microsurgery[C]//2nd International Symposium on Medical Robotics and Computer Assisted Surgery.Baltimore,USA,1995:89-96.
[27]RIVIERE C N,RADER R S,THAKOR N V.Adaptive canceling of physiological tremor for improved precision in microsurgery[J].IEEE Transactions on Biomedical Engi-neering,1998,45(7):839-846.
[28]VELUVOLU K C,TAN U X,LATT W T,et al.Bandlimited multiple Fourer linear combiner for real-time tremor compensation[C]//IEEE International Conference on Engineering in Medicine and Biology Society.Lyon,France,2007:2847-2850.
[29]ZHANG J Z,PRICE B T,ADAMS R D,et al.Detection of involuntary human hand motions using empirical mode decomposition and Hilbert-Huang transform[C]//IEEE International Midwest Symposium on Circuits and Systems 2008.Knoxville,USA,2008:157-160.
[30]ROCON E,PONS J,LANDRADE A O,et al.Application of EMD as a novel technique for the study of tremor time series[C]//28th Annual International Conference of the IEEE Engineering in Medicine and Biology Society.New York,USA,2006:6533-6536.
[31]ADELSTEIN B,ROSEN M.The effect of mechanical impedance on abnormal intention tremor[C]//Proceedings of the 9th Annual Northeast Bioengineering Conference.Piscataway,USA,1981,3:205-209.
[32]ROSEN M,DUNFEE D,ADELSTEIN B.Suppression of abnormal intention tremor by application of viscous damping[C]//Proceedings of the 4th Congress Intl Soc Electrophysiol Kinesiol.Boston,USA,1979:4-5.
[33]KOTOVSKY J,ROSEN M J.A wearable tremor-suppression orthosis[J].Journal of Rehabilitation Research and Development,1998,35(4):373-387.
[34]ROCON E,BELDA-LOIS J M,RUIZ A F,et al.Design and validation of a rehabilitation robotic exoskeleton for tremor assessment and suppression[J].IEEE Transactions on Neural Systems and Rehabilition Engineering,2007,15(3):367-378.
[35]JASON W,PHILIP B,IKITA A,et al.Wearable essential tremor solution[EB/OL].[2011 -02-24].http://www.picobay.com/projects/Wearable% 20Essential%20Tremor%20Suppression%20Device.pdf.
[36]SITARAM S,GUPTA C L A.Active vibration control of essential tremor[C]//14th National Conference on Machines and Mechanisms.[S.l.],2009:446-449.
[37]孙建,葛运建,余永,等.穿戴型人体手臂震颤检测与抑制机器人及其震颤抑制方法:中国,ZL20091014437.1[P].[2009-12-30].
SUN Jian,GE Yunjian,YU Yong,et al.A wearable robotic exoskeleton for tremor assessment and suppression and the strategies for tremor suppression Patents for inventions:China,ZL20091014437.1[P].[2009-12-30].
[38]孙建.基于外骨骼机器人技术的人体手臂震颤抑制关键技术研究[D].合肥 :中国科学技术大学,2010:120-124.
SUN Jian.The study of key techniques for hand tremor suppression based on the wearable exoskeleton robot techniques[D].Hefei:University of Sciences and Technology of China,2010:120-124.
[39]李军强.面向病理性震颤的抑震机器人及其关键技术的研究[D].哈尔滨:哈尔滨工业大学,2010:31-36.
LI Junqiang.Research on tremor suppression robot and key techniques for pathological tremor[D].Harbin:Harbin Institute of Technology,2010:31-36.
[40]毕胜,鄢达米,王福根,等.基于肌电信号分析的功能性电刺激控制系统及其应用[J].中国康复医学杂志,2001,16(1):40-42.
BI Shen,YAN Dami,WANG Fugen,et al.The application of functional electrical stimulation technique based on the EMGs[J].Chinese Journal of Rehabilitation Medicine,2001,16(1):40-42.
[41]明东,万柏坤.功能性电刺激技术在截瘫行走中的应用研究进展[J].生物医学工程学杂志,2007,24(4):932-936.
MING Dong,WAN Baikun.Progress in research on application of functional electrical stimulation technique in paraplegic walking[J].Journal of Biomedical Engineering,2007,24(4):932-936.
[42]PROCHAZKA A,ELEK J,JAVIDAN M.Attenuation of pathological tremors by functional electrical stimulation-I:method[J].Annals Biomedical Engineering,1992,20(1):225-230.
[43]JAVIDAN M,ELEK J,PROCHAZKA A.Attenuation of pathological tremors by functional electrical stimulation-II:clinical evaluation[J].Annals Biomedical Engineering,1992,20(1):231-236.
[44]GILLARD D M,CAMERON T,PROCHAZKA A,et al.Tremor suppression using functional electrical stimulation:a comparison between digital and analog controllers[J].IEEE Transactions on Rehabilition Engineering,1999,7(3):385-388.
[45]ZHANG Dingguo,ANG W T.Tremor suppression of elbow joint via functional electrical stimulations:a simulation study[C]//Proceedings of the 2006 IEEE International Conferenceon Automation Science and Engineering.Shanghai,China,2006:182-187.
[46]WIDJAJA F,CHENG Y S,POIGNET P,et al.FES artifact suppression for real-time tremor compensation[C]//2009 IEEE 11th International Conference on Rehabilitation Robotics.Kyoto,Japan,2009:53-58.
[47]ROSEN M J,ARNOLD A S,BAIGES I J,et al.Design of a controlled-enegry-dissipation orthosis(CEDO)for functional suppression of intention tremors[J].Journal of Rehabilitation Research and Development,1995,32(1):1-16.
[48]RIVIERE C N,RADER R S,THAKOU N V.Adaptive cancelling of physiological tremor for improved precision in microsurgery[J].IEEE Transactions on Biomedical Engineering,1998,45(7):839-846.
[49]PLEDGIE S,BARNER K,AGRAWAL S.Tremor sup-pression through impedance control[J].IEEE Transactions on Rehabilitation Engineering,2000,8(1):53-59.
[50]GONZALEZ J,HEREDIA E,ARMAN T,et al.Filtering involuntary motion of people with tremor disability using optimal equalization[J].IEEE International Conference on Systems,Man,and Cybernetics,1995,3(3):2402-2407.

孙建,男,1981年生,助理研究员,博士,主要研究方向为机器人技术及其应用研究.目前主持国家自然科学青年基金项目1项、安徽省自然科学基金项目1项,获得发明专利1项、实用新型专利2项,发表学术论文10余篇.
向馗,男,1976年生,副教授,博士,主要研究方向为生理信号处理和人机同步.目前主持国家自然科学青年基金项目1项、湖北省自然科学基金项目1项,发表学术论文20余篇.
高理富,男,1970年生,研究员,博士生导师,博士,主要研究方向为机器人及其传感器技术,主持完成多项国家级科研项目,发表学术论文10余篇.
A comprehensive review of fundamental theory and methodology for tremor suppression of human arm based on robotic exoskeleton technology
SUN Jian1,XIANG Kui2,GAO Lifu1,LI Tao2,GE Yunjian1
(1.Institute of Intelligent Machines,Chinese Academy of Sciences,Hefei 230031,China;2.College of Automation,Wuhan University of Technology,Wuhan 430070,China)
The paper introduces a comprehensive review of research work about tremor suppression of human arm based on the theory and methods of"Non-Medication"Methodology(robotic exoskeleton technology and signal processing technology)as the following aspects:1)tremor and tremor mechanisms;2)treatment of common tremor disorders;3)tremor signal extraction and processing;4)control strategies for tremor suppression based on rehabilitation robotic exoskeleton technologies;5)study on the evaluation of tremor suppression strategies.In particular,special focus has been put on the current research on the tremor signal extraction and processing based on the Fourier technology and the Hilbert-Huang transform(HHT)and the ambulatory and non-ambulatory tremor reduction and suppression technologies based on the rehabilitation robotic exoskeleton technologies.The paper introduces a comprehensive investigation of the key issues of the theory and methods of“non-medication”tremor treatment,which lays the foundation for subsequent research.
tremor;robotic exoskeleton;Hilbert-Huang transformation;EMD;signal analysis and processing
TP18
A
1673-4785(2012)04-0283-11
10.3969/j.issn.1673-4785.201112006
http://www.cnki.net/kcms/detail/23.1538.TP.20120803.1630.002.html
2011-12-08. 网络出版日期:2012-08-03.
国家自然科学基金资助项目 (61105087);安徽省自然科学基金资助项目(090412039).
孙建.E-mail:jsun@iim.ac.cn.
