基于半车模型的悬架与ABS系统协调控制研究
2012-08-16张金超王晓亮
张金超,陈 龙,王晓亮,陈 阳
(1.江苏大学 汽车与交通工程学院,江苏镇江212013;2.上海大众产品工程部底盘科,上海201805)
车辆底盘是统一的整体,只有在各个系统协调工作时,整个车辆才能获得最理想的性能。在对整车性能要求越来越高的今天,以简单将各个系统罗列在底盘上而组装成的车辆已经远远不能满足人们对车辆性能要求。因此,各汽车强国很早就开始了车辆底盘集成技术的研究。A.Trachtler[1]建立了悬架、转向和制动系统的集成系统模型,提出集成控制方法,并用于底盘系统的主动控制中。Wei Enting 和 Jung Shanlin[2]针对 ABS与主动悬架联合系统,提出一种非线性集成控制方法,改善了汽车的制动性和平顺性,达到了良好的效果。国内对底盘集成技术的相关研究还不多见[3-4],冯金芝[5]对转向系统和制动系统及悬架系统与制动系统的集成控制进行了研究,但仅以制动性能的提高为主要目标,悬架系统的性能没能得到有效改善甚至趋于恶化,未能让集成控制效果达到最佳。
针对目前国内在此领域研究存在的不足,笔者在车辆半主动悬架系统与防抱死制动系统模型的基础上,分别建立模糊控制器和滑模控制器对两系统进行单独控制,然后建立两系统的协调控制器对两系统进行协调,旨在同时提高车辆的制动性能和车辆的平顺性。
1 联合系统模型的建立
1.1 半主动悬架模型
车辆在一定条件下可以简化成为一个线性动力学系统。笔者主要研究悬架系统的垂直和俯仰运动,因此,建立了半主动悬架系统(semi-active suspension)4自由度动力学模型。系统中弹簧和阻尼可调式减震器并联,弹簧刚度认为不变,减振器节流孔的通流面积可通过步进电机进行调节,以实现减振器输出阻尼力的不同,如图1。
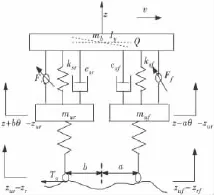
图1 半主动悬架模型Fig.1 Semi-active suspension model
由牛顿第二定律,建立系统运动微分方程式:
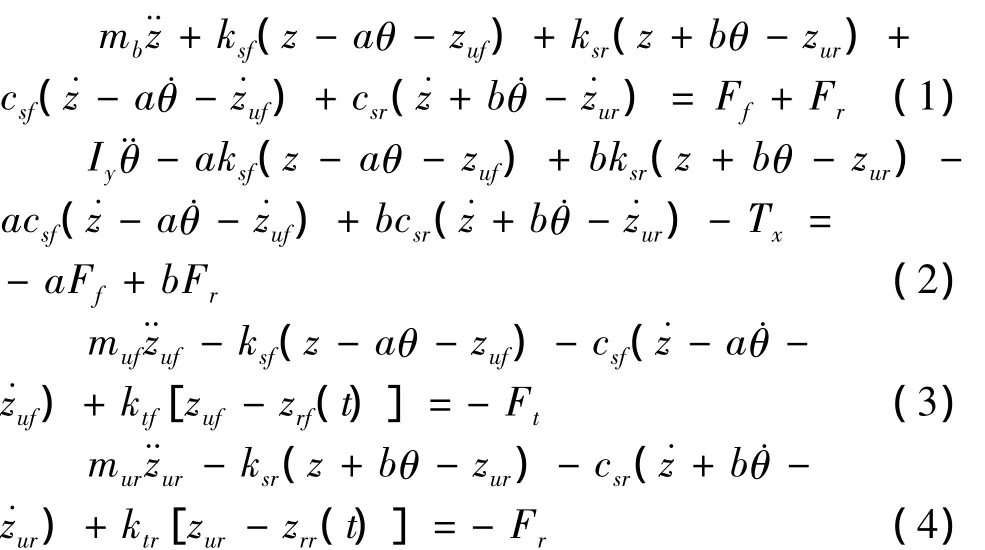
式中:Tx=(Fxf+Fxr)(H+z)为作用在车轮上的制动力矩;Fxf,Fxr为作用在前后车轮上的制动力;H为车辆质心高度;mb为车身质量;muf,mur分别为前后悬架质量;ksf,ksr分别为前后悬架刚度系数;ktf和krf为前后轮胎刚度系数;csf和csr分别为前后减振器阻尼系数;zrf和zrr为前后路面激励;z车身位移;θ为车身俯仰角;a,b分别为车辆质心到前、后轴的距离;Iy为车身转动惯量。
笔者采用白噪声激励下模拟产生的路面垂直位移作为系统的道路输入。仿真时采用B级柏油路面。
1.2 制动系统模型
1.2.1 整车及车轮转动模型
结合上面建立的半主动悬架系统4自由度动力学模型,建立的半车直线行驶制动模型,如图2。模型建立过程中,不考虑坡道阻力、空气阻力和滚动阻力的影响。
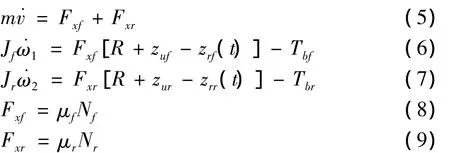
图2中,v为车辆纵向行驶速度;˙v是车辆纵向加速度;ω是车轮角速度;R车轮滚动半径;Tb制动器产生的制动力矩;Fx作用在轮胎上的制动力;Nf,Nr分别是前后轴轮胎承受的地面法向作用力。

图2 半车制动系统模型Fig.2 Semi-brake system model
根据牛顿力学第二定律,可以得出模型的运动学微分方程:
考虑车身俯仰造成的影响,轮胎垂直载荷中的动载荷就不能简单的由整车质量的惯性力决定,而必须由1个簧载质量的惯性力,2个非簧载质量的惯性力和1个俯仰惯性力来决定,由此得到:
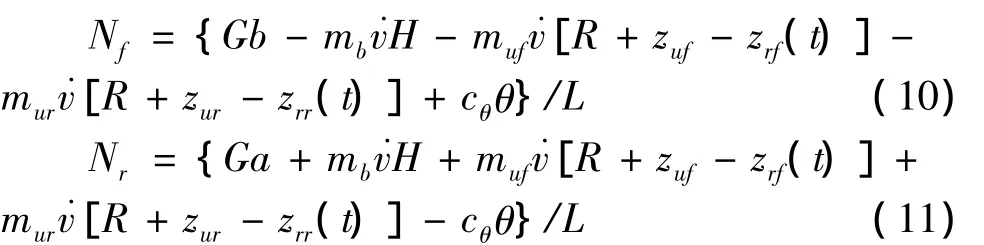
式中:cθ为俯仰角刚度,cθ=2(a2ksf+b2ksr)。
1.2.2 轮胎模型
轮胎模型采用由H.B.Pacejka提出的“魔术公式”轮胎模型。

车辆行驶在高附着系数的路面上时,取 A=0.85,B=1.8,C=8,D=5。
笔者的研究重点不是集中在制动器方面,因此不考虑制动力矩的产生机理,所以可将制动器模型简化,只描述制动力矩和时间的关系。可表述为:

式中:t为时间;u为制动强度系数。
2 控制策略研究
2.1 半主动悬架系统模糊控制
模糊控制理论[6]是用数学手段,仿效人脑思维,对复杂事物进行模糊度量、模糊识别、模糊推理、模糊控制和模糊决策,它能够高效率地对复杂事物做出正确无误的判断和处理。模糊控制器的基本结构,如图3。
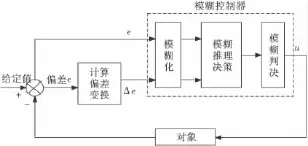
图3 模糊控制器结构Fig.3 Fuzzy controller structure
模糊控制器主要是控制车身的俯仰运动,使车身的俯仰角及前后悬架动行程在一个允许的范围内,提高制动时车辆的平顺性,改善车辆制动过程的轴荷转移,使前后车轮都有足够的垂直载荷分布;从而可以提供足够的水平制动力,提高车辆制动过程的安全性。在制动和非制动工况下分别选取前后悬架的动行程及变化率和车身垂直振动加速度及变化率为模糊控制器的输入变量,输出均为前后半主动悬架的阻尼力。隶属度函数都采用灵敏度较高的三角形函数,模糊推理的过程采用马丹尼极小运算法(Mamdani’s fuzzy inference method),并采用工程中常用的面积重心法(Centriod of area),对输出变量进行解模糊化。
2.2 防抱死制动系统滑模控制
根据ABS的作用原理,主要通过控制制动过程中车轮滑移率λ在某一区间内来实现车轮防抱制动。设定在某一路面上,λref为常数,则切换函数为:

如果纵向滑移率差e及其导数˙e构成一相平面,为保证制动过程中轮胎相对于地面的滑移状态项轨迹(e,˙e)能够沿切换线滑向控制目标(0,0),选取制动力矩控制变量u,然后对系统进行开关控制,即:

由于制动系统液压执行机构本身存在一定的滞后性,也为了减小系统频繁调整引起的系统振动,笔者对控制量的切换条件进行了修正:

式中:δ为修正参数(试验确定的较小正值)。
制动系统输出的制动力矩为:

式中:L1,L2为正的常数。
2.3 协调控制策略
从上面建立的两系统数学模型可以发现,制动系统产生的水平制动力矩Tx和制动减速度a将影响悬架系统的动行程和俯仰角,从而影响车辆的平顺性和操稳性。悬架系统的悬架动行程和车身俯仰角又通过影响整车的垂直载荷分布来影响制动性能。同时,汽车制动过程中车速不断降低,必将导致与车速相关的白噪声路面输入处于时变,在时变的路面输入下,汽车悬架的垂向振动、侧倾运动和时不变系统是不同的。两系统之间联系,如图4。
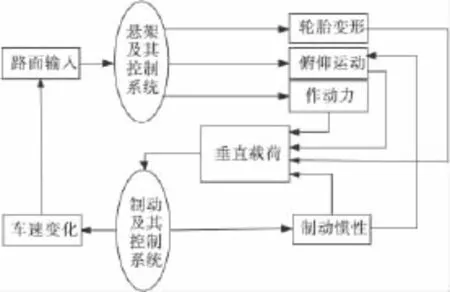
图4 悬架系统与制动系统之间的联系Fig.4 Relationship between suspension system and braking system
分析可见,两系统主要通过制动过程中垂直载荷的转移和车速的不断变化联系在一起的。
建立协调控制器[7-8]希望将两系统的相互影响降低到最小。协调控制器接收两系统的状态参数,判断车辆是否处于制动状态。当没有制动时,协调控制器将车身垂直振动加速度及其变化率设定为模糊控制器输入参数,综合控制悬架系统各性能指标,使车辆具有良好的平顺性和操稳性;当判断车辆处于制动状态时,协调控制器一方面调整模糊控制器输入参数为悬架动行程及其变化率,同时通过传感器跟踪轮速、车速等车辆运动状态参数,并进行跟踪处理,求解得到车辆制动减速度、轮胎纵向滑移率及各车轮垂直载荷,根据轮胎力学模型,求出地面能够提供的最大制动力,并据此计算制动器理论油压,从而提供给滑模控制器指令,调节制动力矩。协调控制器在优先保证制动性能的前提下,还会根据车轮垂直载荷的变动,修正模糊控制器的反模糊化参数,从而使制动过程中的车辆平顺性得到优化。协调控制器控制框图如图5。

图5 协调控制器Fig.5 Coordination controller block diagram
3 系统的仿真计算与分析
在MATLAB/Simulink环境下建立系统的仿真模型,选用B级路面,初始车速50 km/h对系统进行仿真,采用4阶 Runge-Kutta法,计算步长0.01 s。仿真车辆的结构参数如表1。
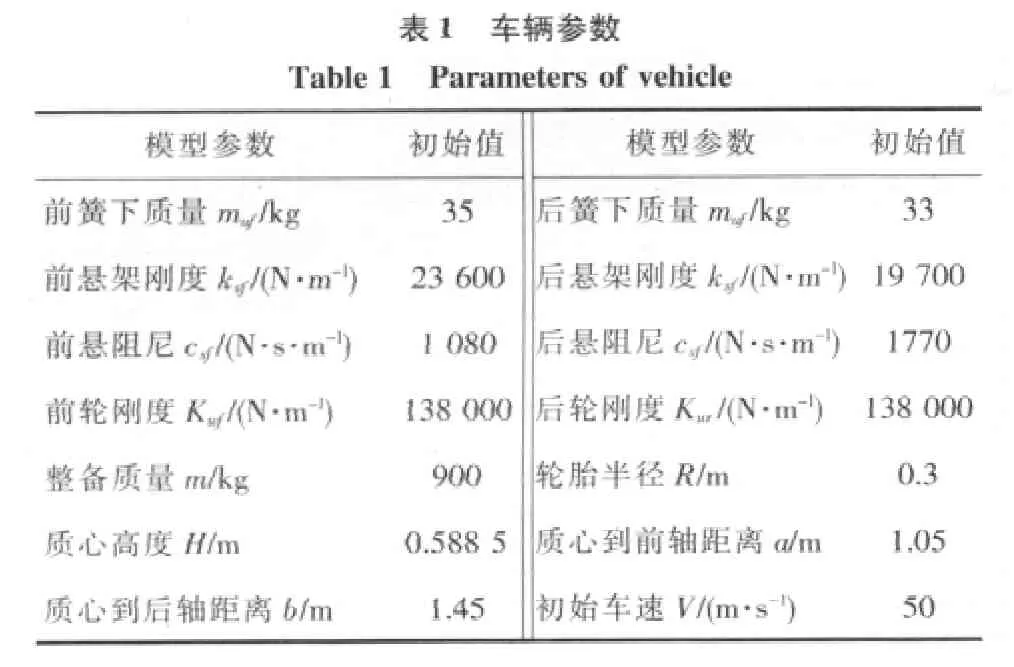
?
仿真得出被动悬架和制动系统联合仿真的和半主动悬架和制动系统联合仿真两种不同系统下各系统参数的响应情况。
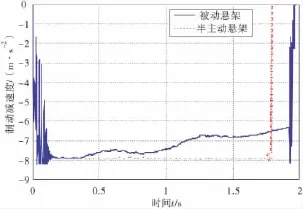
图6 制动减速度曲线Fig.6 Braking deceleration curve
根据图6可知,半主动悬架能够更好的利用路面提供的附着力,制动过程中,制动减速度能够平稳的保持在8 m/s2左右。而被动悬架车辆在制动过程中,由于减振器阻尼不可调,导致车辆制动时悬架动行程变化较大,使得车辆垂直载荷的分布变动较大,因此,车辆不能始终获得最大地面制动力,导致制动减速度减小。同时,由于半主动悬架车辆制动时制动减速度较大,停车时间也有所减小,半主动悬架车辆停车时间1.78 s,被动悬架停车时间为 1.96 s。
由图7中数据可见,装有半主动悬架车辆比安装被动悬架车辆的车速减小更快。根据车速变动曲线可以计算得到,被动悬架车辆的制动距离为15.15 m,半主动悬架车辆制动距离为13.65 m。

图7 车速变化曲线Fig.7 Speed curve
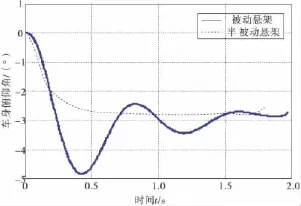
图8 车身俯仰角Fig.8 Body pitch angle
据图8可得,被动悬架车辆俯仰角振动较大,说明制动时车辆俯仰运动非常明显,这对制动过程中车辆的平顺性有较大的影响。而半主动悬架恰恰解决了这个问题,制动时车身俯仰角非常平稳。被动悬架车辆俯仰角均值为3.24°,半主动悬架车辆俯仰角均值为 2.87°。

图9 车身质心处垂直振动加速度Fig.9 Body center of mass vertical vibration acceleration
由图9可见,装有半主动悬架的车辆垂直振动更为平稳。这是因为半主动悬架会根据车辆的运动状态,适时调控半主动悬架的阻尼力,当车辆有较大且相对频繁的垂直载荷变化时,控制器发出指令增大减振器阻尼,从而减小车身的振动。对比图9中两条曲线可见,半主动悬架能够有效的抑制车辆的俯仰及垂直方向的振动。仿真得到制动过程中各参数如表2。

表2 仿真结果Table 2 Simulation results
表2中数据表明,制动过程中,半主动悬架能够有效改善的车辆的制动性能和平顺性能。
4 试验验证
为验证半主动悬架的和ABS联合系统的实际工作效果,根据CH7145样车的被动减振器进行改装,使其阻尼力可根据路况连续可调。阻尼力通过加装在减振器上部的步进电机进行调节,步进电机通过与其他人员合作开发的AT89S51单片机的DOFLY DY-mini80V2系列开发板进行实时控制。控制程序采用C语言在Keilu Vision2编程软件上进行编写。可调阻尼减振器及其开发电路如图10。

图10 可调阻尼减振器及其控制电路Fig.10 Tunable damper and control circuit
将可调阻尼减振器装在CH7145试验车上进行制动试验(图11),制动应用试验车辆原有的ABS系统。

图11 前后减振器装车形式Fig.11 pre and post damper loading graph
试验测得装有被动悬架与半主动悬架的车辆,以50 km/h制动时,制动减速度、车身俯仰角、车速、质心位置加速度等数据如图12~图15。
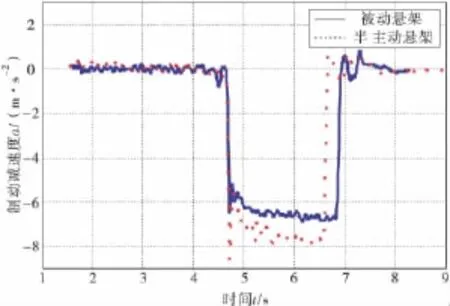
图12 制动减速度曲线Fig.12 Braking deceleration curve

图13 车身俯仰角曲线Fig.13 Body pitch angle curve
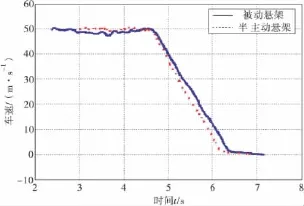
图14 车速变化曲线Fig.14 Speed curve
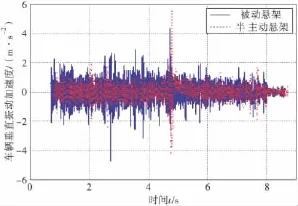
图15 车身质心处加速度曲线Fig.15 Body center of mass acceleration curve
综合以上结果可见,装有半主动悬架的车辆在全力制动的瞬间,各曲线都有一个较大的尖峰,这是因为车辆正常行驶时,控制器以车辆平顺性为主要目标,此时减振器阻尼较小,车辆平顺性较好。突然制动时,控制器检测信号并发出调整指令需要一定时间,使得系统调节有了一个小的时间滞后。通过比较可见,装有半主动悬架的车辆能够获得更大的制动减速度,车身俯仰角得到有效控制,制动距离有所减小,车身加速度也有所降低。试样数据如表3。
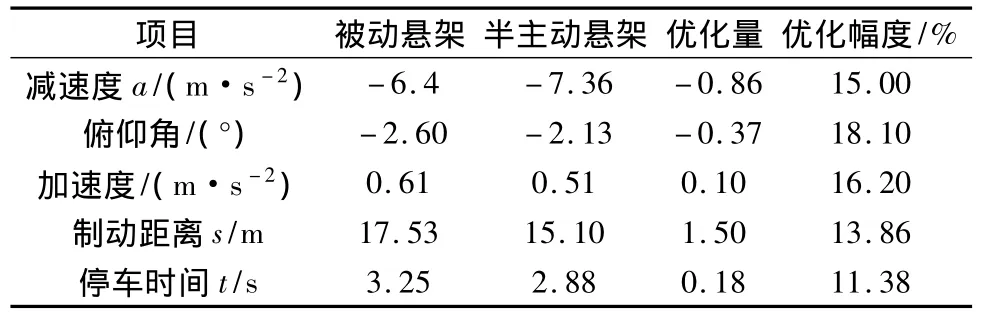
表3 实验结果Table 3 Experiment results
将实验所得数据与仿真数据比较可见,二者虽有差距但是误差较小,误差主要是由于建立车辆数学模型时不得不做出一些简化,加之建模过程中没考虑环境车辆状况等因素的影响造成的。但试验和仿真结果变化趋势一致,说明所建立的联合仿真模型正确。
根据表3数据可见,装有半主动悬架的车辆与装有被动悬架的车辆相比,制动减速度增大了15.00%,车身俯仰角减小了18.10%,制动距离和制动时间也分别有13.86%和11.38%的减小,说明文中提出的半主动悬架与防抱死制动联合协调控制方法能够根据实际需要,有效改善车辆的性能。所研制的半主动悬架控制精确能够满足车辆的使用需要。
5 结 语
1)根据车辆系统动力学及牛顿力学原理建立了车辆半主动悬架及防抱死制动系统联合模型,试验结果表明,该模型能够有效的进行制动过程中车辆平顺性及制动性仿真分析。
2)提出的半主动悬架系统及制动系统协调控制方法能够有效改善车辆的制动性能及制动时车辆的平顺性。试验表明,使用该控制方法后,车辆制动距离和制动减速度分别有13.86%和11.38%的减小,制动减速度增大了15.00%,而制动时车辆垂直振动加速度和车身俯仰角分别有16.20%和18.10%的减小。
[1]Trachtler A.Integrated vehicle dynamics control using active brake,steering and suspension systems[J].International Journal of Vehicle Design,2004,36(1):1-2.
[2]Wei Enting,Jung Shanlin.Nonlinear control design of anti-lock braking systems combined with active suspensions[J].Control Theory & Applications,2004,1(1):343-348.
[3]喻凡,李道飞.车辆动力学集成控制综述[J].农业机械学报,2008,39(6):1-6.Yu Fan,Li Daofei.Review on integrated vehicle dynamics control[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(6):1-6.
[4]陈祯福.汽车底盘控制技术的现状和发展趋势[J].汽车工程,2006,28(2):105-113.Chen Zhenfu.Status and tendency of the vehicle chasses control technology[J].Automotive Engineering,2006,28(2):105-113.
[5]冯金芝,喻凡,李君,等.车辆防抱制动系统与主动悬架联合控制[J].农业机械学报,2002,33(2):15-19.Feng Jinzhi,Yu Fan,Li Jun.et al.An investigation on integrated control of vehicle anti-lock braking system and active suspension[J].Transactions of the Chinese Society for Agricultural Machinery,2002,33(2):15-19.
[6]陈龙.车辆半主动悬架及其控制系统理论与技术研究[D].镇江:江苏大学,2006.
[7]孙斌.汽车底盘系统的分层集成控制研究[D].合肥:合肥工业大学,2008.
[8]丁亚康.汽车底盘集成及其控制技术研究[D].武汉:武汉理工大学,2009.
