电磁作动器的参数设计及仿真分析
2012-08-16黄鼎友张金文陈少梁
黄鼎友,张金文,陈少梁
(江苏大学汽车与交通工程学院,江苏镇江202013)
随着高速公路的发展,路面激励的成份逐渐弱化[1]。发动机作为现代汽车的主要动力来源,逐渐成为了主要的振动源。由于现代汽车对性能和环境的要求很高,因此像稀薄燃烧技术,车身轻量化,发动机怠速缺缸点火技术等得到了广泛应用。但这些技术也直接或间接导致了汽车发动机噪声的加剧。而降低发动机振动向车身的传递是解决这一矛盾最有效的办法[2]。因此,国外各大汽车厂商和相应的一些研究机构纷纷展开了主动悬置的研究,以此来达到降低发动机振动噪声的目的。而主动控制系统的设计重点之一就是设计出高性能的作动器[3]。而作动器产生的作动力,必须要有合理的振幅,并且对控制信号响应迅速[4]。作为执行机构的作动器,其目的是通过将控制器输出的电量转变为位移、力、应变等,以实现控制对象的应力驱动、位移驱动、力驱动。所以作动器是主动控制系统的关键部件之一[5]。作动器的种类较多,目前常用的有电磁作动器、液压作动器、压电作动器、磁致伸缩作动器、电致伸缩作动器、气动作动器等。电磁作动器的特点是:结构紧凑、反应灵敏、输出位移大、适用频带宽,因此在许多领域得到广泛应用[6]。
1 电磁作动器的原理
电磁作动器是一种利用电磁场的变化来产生作动力的装置。在作动器的磁场线圈中通入交流电,而交流电是一种正弦变化的电流,所以线圈会产生正弦变化的磁场,此正弦磁场可以使相应的铁磁结构产生一定的振动。可以通过对正弦电流的主动控制来产生和发动机振动反相位的振动,从而实现降低发动机的噪声的目的。
2 电磁作动器的结构
电磁作动器的构成为:加载面、支撑架、内磁极、电磁线圈和底座。其结构简图如图1。
当电磁线圈通电时,电磁线圈产生磁性,打破了原有的磁场平衡,便对线圈产生了和电流成正比的安培力。此安培力和电流的关系为:

式中:F为安培力,N;B为磁感应强度,T,B=Hμ(T)(H为磁场强度,A/m;μ为气隙的磁导率μ≈4π×107H/m);i为线圈电流,A;L为线圈长度L=2πRN(R为线圈半径,m;N为线圈扎数),m。
式(1)可写为:

由式(2)可知,当磁感应强度和电磁线圈长度一定时 ,安培力F与电流i成正比[7],因此式(2)可简化为:

式中:k=2πRNμH ,为一个常数[7]。
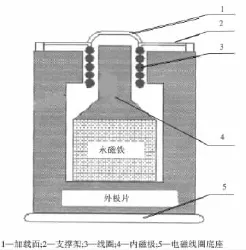
图1 电磁作动器结构Fig.1 Electromagnetic actuator structure diagram
3 电磁作动器的力学模型
电磁作动器的力学模型如图2。
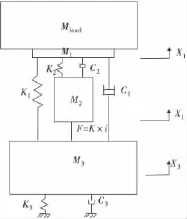
图2 电磁作动器的力学模型Fig.2 The mechanical model of electromagnetic actuator
从该力学模型中可以看出,作动器是由4个不同的等效质量体构成支撑架质量M1、等效载荷质量Mload、等效线圈质量M2和等效悬架质量M3。图2中,悬置的等效刚度为K1、阻尼为C1;作动器线圈的刚度为K2、阻尼为C2;悬架的刚度为 K3、阻尼为C3。安培力F作用于M2和M3之间。支撑架的位移为X1,线圈的位移为 X2,悬架的位移为X3。
3.1 等效载荷质量Mload和支撑架质量M1的运动微分方程
根据F=ma,得到此力学模型的运动微分方程。

作动器的输出力Fa=(M1+Mload)¨x1,记M1+Mload=m,则Fa=m¨x1。
3.2 作动器线圈质量M2的运动微分方程

3.3 等效悬架质量M3的运动微分方程

对系统的运动微分方程做拉氏变换,由式(4)~式(6)得:

式中:x1=X1(s);x2=X2(s);x3=X3(s);F=F(s)。
将作动器的输出力Fa=m¨x1与安培力F=k×i写成传递函数的形式:

式中:a0=0;a1=0;a2=K2K3;a3=K2C3+K3C2;a4=K2M3+C2C3-K1M2;a5=C2M3-C1M2;b0=K1K2K3;b1=C1K2K3+C2K1K3+C3K1K2;b2=(m+M2)K2(K1+K3)+C1C3K2+K1K2M3+K1K3M2+C1C2K3;b3=(m+M2)C2(K1+K3)+(m+M2)K2(C1+C3)+K2C1M3+K3C1M2+K1C2M3+K1C3M2+C1C2C3;b4=mM2(K1+K3)+(mC2+M2C2)(C1+C3)+(m+M2)K2M3+K1M2M3+C1(C2M3+C3M2);b5=mM2(C2+C3)+mC2M3+(C1+C2)M2M3;b6=mM2M3。
4 模型参数的选择及仿真分析
模型的参数选择如下:m=10 kg;M2=1.3 kg;M3=80 kg;K1=24 000 N/m;K2=4.4 × 108N/m;K3=20 000 N/m;C1=35 N·m/s;C2=1 350 N·m/s;C3=500 N·m/s。
因为安培力F与输入电流i成正比关系,所以由传递函数式(10)可得到作动器的输出力Fa与安培力F之间的频响关系曲线,即为Fa与i之间的频响曲线。如图3。

图3 Fa和电流i之间的频响曲线Fig.3 The frequency response curve between Faand i
由图3(a)可以看出,由于系统产生共振的原因,此曲线在18,50,20 000 Hz左右有3个峰值。在18~50Hz和50~20 000 Hz之间,Fa/i的数值为一定值。而从图3(b)中也反映出Fa与i之间相位差几乎为0,因此输出力和电流在18~20 000 Hz内成线性关系。这样就可以简单的通过控制输入电流而达到控制其作动力的目的。由于4缸4冲程发动机的激振频率一般为 20 ~200 Hz[8],在18 ~20 000 Hz的范围之内,故此作动器适用于发动机主动悬置。不同发动机的激振频率是不一样的,为控制的精确性,需要讨论不同参数变化的作动器对其性能的影响。
1)当支撑架质量和等效载荷的总质量(m)增加或者减少50%时,相应的频响曲线如图4(其余参数不变)。
由图4可以看出,随着m值的不断增大,峰值发生的频率在不断减小。第1峰值的变化尤为明显,并且整个频段内的幅值也相应减小,相位也发生一定的变化。通过曲线可以看出,随着m值的不断增大,此作动器的频响曲线有向左移动的趋势,并且在电流强度相同的情况下,作动器作动力有减小的趋势。在实际的应用过程中,为了综合考虑作动器作动力的大小和线性频带宽度,必须合理的选择作动器的载荷。
2)作动器线圈质量M2增加或者减少50%时,相应的频响曲线如图5(其余参数不变)。

图4 支撑架质量和等效载荷质量(m)变化后的频响曲线Fig.4 The frequency response curve after changing of backstop quality and equivalent load mass

图5 作动器线圈质量M2变化后的频响曲线Fig.5 The frequency response curve after changing actuator coil mass
由图5可以看出,M2值的的变化对于幅频特性曲线第2峰值发生的频率有较大影响。峰值发生的频率随着M2值的增大在逐步减小,相位的变化也较为明显,而M2值对其他频率下的幅值的相位几乎没有影响。曲线第2峰值有左移的趋势。因此,在线圈质量一定的条件下,电磁作动器作动力的增大,必然是限制了线性频带的宽度。因此,在实际的应用中,应该合理设计作动器的线圈质量,从而获得较为理想的作动力和线性频带宽度。
3)作动器线圈阻尼C2增加或者减少50%时,相应的频响曲线如图6(其余参数不变)。

图6 作动器线圈阻尼C2变化后的频响曲线Fig.6 The frequency response curve after changing of actuator coil damping
由图6可以看出,随着参数C2发生变化,第二峰值随着C2值的增加而逐渐减小,于此同时,也引起了相位的改变,C2值越小,两峰值频率间的相位差越趋紧于零。因此,在电磁作动器的设计过程中,电磁作动器线圈阻尼的合理设计可以有效控制高频时的共振幅度,从而能够保护电磁作动器及其控制元件,使主动悬置的控制更加合理。
4)作动器线圈刚度K2增加或者减少50%时,相应的频响曲线如图7(其余参数不变)。

图7 作动器线圈刚度K2变化后的频响曲线Fig.7 The frequency response curve after changing of the stiffness of the actuator coil
由图7可以看出随着参数K2增加,第2共振频率的幅值亦随之增加,第1共振频率的幅值不变。最重要的是,参数K2增加使得曲线第2峰值频率右移。因此可以利用这一特性来抵消由上述其它参数的变化而引起的第2峰值频率的左移。
其他参数增大或减小50%时,图像变化不明显,可知它们对作动器性能影响很小,因此这里不作讨论。
4 结语
为发动机主动控制设计的电磁作动器,通过仿真分析,阐述了不同参数选择对该作动器的动力性和其适用的频带宽度产生的影响,为电磁作动器的应用提供了理论依据。同时根据发动机不同的激振频率和激振力来反向选择作动器的参数。
[1]丁世稳.发动机主动悬置的控制方法和研究[D].长春:吉林大学,2009.
[2]肖然,樊文欣,郭常立,等.发动机振动主动控制中电磁作动器的设计和性能研究[J].机电产品开发与创新,2009,22(1):114-115.Xiao Ran,Fan Wenxin,Guo Changli,et al.Design and study on performance of electromagnetic actuator in vibration control system for automotive engine[J].Development& Innovation of Machinery& Electrical Products,2009,22(1):114-115.
[3]范会娟,路淼.发动机振动主动控制用电磁作动器的设计和动态特性研究[J].科学技术与工程,2006,6(20):3276-3279.Fan Huijuan,Lu Miao.Design and study on dynamics of new-style and high-powered electromagnetic actuator[J].Science Technology and Engineering,2006,6(20):3276-3279.
[4]代伟峰.半主动控制液力悬置的动态特性研究[D].太原:中北大学,2008.
[5]侯军芳,白鸿柏,陶帅,等.电磁作动器在主动隔振系统中的频响及耦合特性[J].振动与冲击,2008,27(11):177-181.Hou Junfang,Bai Hongbo,Tao Shuai,et al.Frequency response and coupling characteristics of electromagnetic actuator in active vibration isolation system[J].Journal of Vibration and Shock,2008,27(11):177-181.
[6]王福臣.应用电磁作动器的主动式液压悬置隔振性能研究[D].长春:吉林大学,2005.
[7]陈苏.电磁液压悬置设计及性能仿真[D].长春:吉林大学,2007.
[8]梁天也.主动控制式发动机悬置研究[D].长春:吉林大学,2008.
