围绕《全球探索路线图》的国际合作正在逐步展开
2012-08-13范嵬娜北京空间科技信息研究所夏辉国家国防科技工业局信息中心
范嵬娜(北京空间科技信息研究所) 夏辉(国家国防科技工业局信息中心)
2012年5月,全球空间探索大会(GLEX)在美国华盛顿召开,世界各国或地区的航天机构高级官员及探索部门的主管,政府、工业界、学术界、非政府组织的代表出席了此次会议,北京空间科技信息研究所派出两人参会。这次会议在《全球探索路线图》第一版修改过程中召开,是各参与国或地区政府机构、学术界及产业界共同研讨、协调的好机会,是国际合作空间探索进程中的一个重要里程碑。
1 全球合作空间探索战略及途径达成一致
早在2006年,14个国家或组织[美国、俄罗斯、欧洲航天局(ESA)、中国、英国、法国、德国、意大利、日本、韩国、印度、乌克兰、澳大利亚、加拿大]的航天机构开展了关于全球合作空间探索的一系列讨论,共同绘制太阳系机器人和载人空间探索的愿景。2007年5月,14个国家或组织的航天机构联合发布了多国合作空间探索的顶层战略—《全球探索战略:合作框架》。之后根据该战略要求,成立了国际空间探索协调组(ISECG)。通过这个机构,各航天机构可以交换信息,促进各自的探索计划及合作的探索工作。2011年9月,ISECG 联合12个国家或组织(不包括中国)发布了《全球探索路线图》,该路线图规划了未来25年通过国际合作人类持续探索月球、小行星和火星的路径和方案,规定了探索目标和目的、任务方案及探索准备活动的协调等,促进了全球合作探索战略的实施。
空间探索的共同目标及目的达成一致
参与签订《全球探索路线图》的12个国家或组织表达了一致的看法,那就是空间探索活动可以为各参与国带来诸多价值。
分阶段、分步骤探索月球、小行星、火星多个目的地
关于未来25年的空间探索活动,各参与方表示要积极参与,各主要航天国家也正在开发先进技术和系统,认为要分阶段、分步骤地探索多个目的地,主要目的地包括月球、小行星和火星,可能还包括拉格朗日点等其他目的地。
通过两条途径实现登陆火星这个长期目标
各国达成一致,火星是长期(25年)载人探索的最终目的地,各方认为可以通过两种途径实现:“小行星优先”方案和“月球优先”方案。
(1)“小行星优先”方案的主要特点
· 利用“国际空间站”(ISS)增强探索能力;
· 利用商业/国际服务提供方获得近地轨道进入能力;
· 验证地月空间载人运行的机会,实现未来卫星在轨服务/部署等任务;

未来25年全球探索路线图
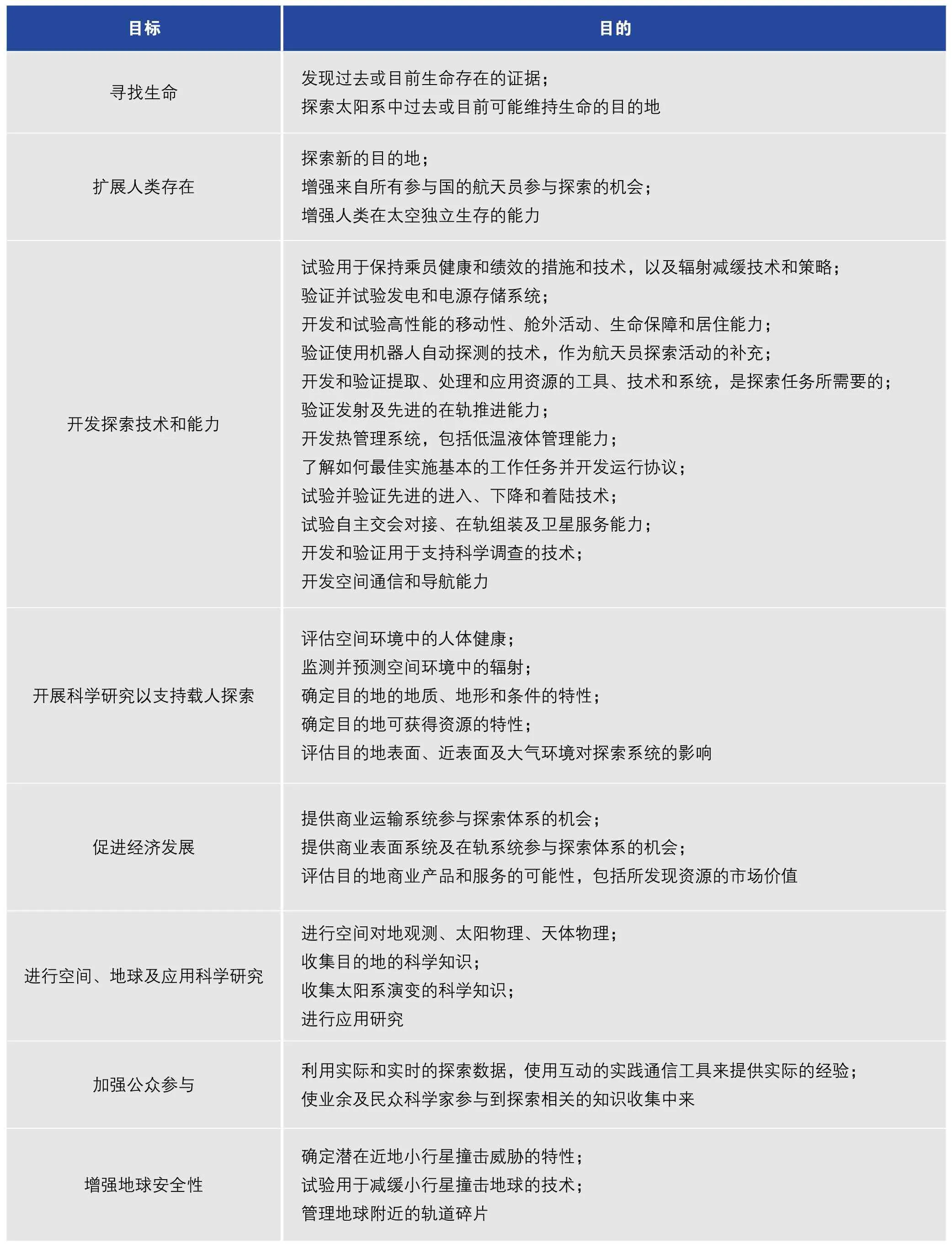
全球合作空间探索的共同目标及目的
· 在地月空间拉格朗日L1点早期部署深空居住舱,允许在深空环境中验证居住及其他关键系统;
· 逐步验证不需要地球定期供给链的载人生存能力;
· “技术牵引”计划,如载人火星任务所要求的先进推进及大型空间发电技术等;
· 2次4名航天员参与的载人小行星任务,之前有数次机器人探测任务,可能访问多个可能的目标小行星来确定每个目标小行星的风险及科学优先级。
(2)“月球优先”方案的主要特点
· 利用ISS增强探索能力;
· 利用商业/国际服务提供方获得近地轨道进入能力;
· 2010-2020年计划进行大量的机器人月球探测任务,提供详细的科学和原位研究信息;
· 早期部署中型和大型货物着陆器,最终作为载人着陆系统的一部分,同时部署载人尺寸的月球车底架以促进机器人探索能力;
· 4名航天员参与的5次长期任务,探索月球极区域,具有长距离的表面移动性,验证火星探索需要的能力;
· “技术牵引”计划,开发长距离表面移动能力、灰尘管理和减缓技术、行星表面居住、精确着陆及先进的表面发电(如有要求)等技术;
· 有限、但适应性强的载人月球活动,可以扩展实施额外的探索任务,或者实现经济驱动的长期应用。
国际合作是长期空间探索活动的必然选择
以火星为长期目标的中长期空间探索活动周期长、规模大,技术复杂,耗资巨大,美、俄、欧等国家或地区多次强调,没有任何一个国家可以完全有能力、有财力来掌握所有空间探索相关的能力,无法独立实现长期探索的宏伟目标,国际合作是必然选择,是发展趋势。
载人和机器人任务协同工作,对于最大化实现任务目标非常关键
在任何探索任务中,载人和机器人协同工作都是必要的,机器人任务包括主要用于满足科学目标的机器人任务、为载人任务作准备的机器人任务以及同载人探测器一起发射的机器人系统。

各目的地探索活动的目标及挑战

“小行星优先”方案
对于参与全球探索路线图的许多航天机构来说,开发机器人探测技术具有很高的优先权。这是由于探索需求有助于促进机器人系统的革新,使相关产业市场受益。未来10年的载人航天活动将集中在近地轨道及开发探索能力上,机器人探测任务将促进我们对太阳系的了解,并为载人探索任务作准备。
2 空间探索系统及开发能力仍是关键
任务方案需开发的关键系统及能力
(1)“月球优先”和“小行星优先”两方案都要具备的系统及能力
· 美国航空航天局(NASA)的“航天发射系统”(SLS):能够运送货物或人员从地球到达目标轨道的重型运载火箭;
· NASA的“多用途乘员飞行器”(MPCV):能够运送乘员到达探索目的地并返回地球的载人航天器;
·俄罗斯的“新一代空间运载火箭”(NGSLV):能够运送货物或人员从地球到达目标轨道的重型运载火箭;
· 俄罗斯的新一代飞船:能够运送乘员到达探索目的地并返回地球的载人航天器;
· 低温推进级(CPS):使用传统化学火箭发动机、低温发电机等向体系部件提供速度增量(△V)的空间级,包括推进剂转移的能力;
· 服务支持系统:能够使航天员和机器人维护在轨系统并组装大型部件能力的系统和工具,包括舱外活动服;
· 商业乘员运输器:能够将航天员运送至近地轨道的商业系统;

“月球优先”方案
· 商业货物运输器:能够将货物运送至近地轨道的商业系统。
(2)“小行星优先”方案需具备的独特系统及能力
· 深空居住舱:具有深空环境所要求的先进能力和系统的在轨居住舱;
· 先进在轨推进级:利用先进推进技术的在轨级,如电能和核能推进;
· 空间目的地系统:使人类能够有效到达目的地的系统。
(3)“月球优先”方案需具备的独特系统及能力
· 月球货物下降级:用于运送最高为8t的货物到达月球表面的系统;
· 月球上升级:与大型下降级组成组合体,用于运送乘员往返月球表面;
· 表面部件:能够使人类有效考察目的地表面目标的系统;
· 1吨级的货物着陆器:用于运送最高为1t的货物到达月球表面的系统。
任务方案需要验证的关键技术
(1)火星长期任务的主要技术挑战
①辐射防护技术和措施;②分系统可靠性和在轨维修能力;③大型有效载荷的进入、下降及着陆;④本地资源的应用,如氧气、水和甲烷;⑤先进的在轨推进技术;⑥低温液体(H2、O2、CH4、Xe)的长期存储和管理;⑦表面移动性,包括常规的舱外活动能力。
(2)“小行星优先”方案需验证的关键技术
· 近地轨道区域:①进一步验证在轨长期居住能力;②分系统的高可靠性、适应性以及保证最低级别的维修;③进一步验证舱外活动和机器人能力;④低温液体的长期存储和管理技术;⑤火星任务运行概念的模拟。
· 地月空间区域:①在适当的辐射环境中长期居住的能力;②辐射防护及措施技术;③近地轨道以远再入速度验证;④系统的自主交付和部署能力;⑤分系统的高可靠性、适应性以及保证最低级别的维修,在轨生活不具备持续的供给链;⑥低温液体的长期存储和管理技术;⑦近地小行星任务运行概念的模拟。
· 近地小行星区域:①验证长期的在轨居住能力;②先进在轨推进系统的验证;③低温液体的长期存储和管理技术;④系统的自主交付和部署能力;⑤分系统的高可靠性、适应性以及保证最低级别的维修,在轨生活不具备持续的供给链;⑥火星任务运输运行概念的验证。
(3)“月球优先”方案需验证的关键技术:
· 近地轨道区域:①进一步验证在轨长期居住能力;②分系统的高可靠性、适应性以及保证最低级别的维修;③进一步验证舱外活动和机器人能力;④低温液体的长期存储和管理技术;⑤运行概念的模拟。
· 月球区域:①表面居住能力;②火星表面探索方案、运行和技术:长期的可移动性、自主部署;③在灰尘环境中长期运行的能力和技术;④近地轨道以远再入速度的验证;⑤如可获得,利用月球表面先进的能源;⑥极端的表面移动性;⑦鲁棒、定期的舱外活动能力;⑧精确地着陆和风险规避。
· 近地小行星区域:①验证长期的在轨居住能力;②验证先进的在轨推进系统;③低温液体的长期存储和管理技术;④系统的自主交付和部署能力;⑤分系统的高可靠性、适应性以及保证最低级别的维修,在轨生活不具备持续的供给链;⑥火星任务运输运行概念的验证。
主要载人探索活动及能力
(1)利用ISS为空间探索服务
ISS在探索准备过程中起着基本的作用,ISS上基本的技术和运行验证包括:①高可靠的居住和生保系统;②人体健康和工作能力;③验证探索能力;④促进通信和空间网络互联能力;⑤运行概念和技术。
(2)机器人任务
机器人探测任务通常是载人探索任务的先驱任务,如阿波罗计划中的“勘测者”、“月球轨道器”等机器人先驱任务为载人月球任务提供了月球环境、限制条件等信息,同时这些机器人任务为后续的载人探索和科学考察任务识别了潜在的风险,并确定了计划到达区域的特点。同样,近些年也发射了几个火星探测任务,包括遥感轨道器、着陆器和火星漫游车等,这些任务获取了有关火星表面和大气环境关键的数据,将指导探索系统的开发和运行概念。
2010-2020年10年间将实行数次机器人探测任务,将为了解月球、小行星、火星及其卫星作出重要贡献。同时,机器人探测与未来载人活动的持续协调开展,既有利于将人类文明扩展至近地轨道以远,又可以使人类更好地了解宇宙。
(3)先进技术开发
在全球空间探索活动中,技术开发重点领域被划分为14个,参与各方共同开发相关技术:
· 发射推进系统(美、俄、欧、日、英、韩、乌克兰参与);
· 空间推进技术(美、俄、欧、日、英、法、意参与);
· 空间能量存储(美、俄、欧、日、英、意、德参与);
· 机器人、远程机器人和自主系统(美、俄、加拿大、欧、日、英、法、德、韩参与);
· 通信和导航(美、俄、加拿大、欧、日、意、法、德、韩、乌克兰参与);
· 人体健康、生命保障和居住系统(美、俄、加拿大、欧、日、意、法、德、韩、英参与);
· 载人探索目的地系统(美、俄、加拿大、欧、日、德、英参与);
· 科学仪器、观测和传感器系统(美、俄、加拿大、欧、日、意、德、韩、英、乌克兰参与);
· 再入、下降和着陆系统(美、俄、加拿大、欧、日、意、法、德、英参与);
· 纳技术(美和欧参与);
· 模拟、仿真、信息技术和处理(美、俄、欧、日、法、德、英参与);
· 材料、结构、机械系统和制造(美、俄、加拿大、欧、日、意、乌克兰参与);
· 地面和发射系统处理(美、俄、乌克兰参与);
· 热管理系统(美、俄、欧、日、意、法参与)。
(4)开发新的空间系统和基础设施

NASA研制的用于探索月球表面的机器人
北京空间科技信息研究所派出两人参加全球空间探索大会
新的空间系统和基础设施包括:重型运载火箭;具有行星际间返回速度的乘员运输能力;可运输关键系统和基础设施到达深空的足够大的空间推进级;服务和支持系统,包括舱外活动和机器人系统。
(5)模拟活动
美国、加拿大等几个国家在独立开展或合作开展模拟活动。这些活动不仅可以模拟环境来试验探索技术、概念系统及其互操作性,以及探索运行的概念。也可以为公众参与提供重要的机会。各航天机构可以共享他们的规划和经验教训,促进探索的准备活动。
3 启示
(1)多国合作探索是载人深空探索的发展趋势
2007年《全球探索战略:合作框架》的签订以及2011年《全球探索路线图》的公布,使多国合作载人探索的意向、途径和方案更加清晰。以火星为长期目标的载人深空探索活动技术复杂,耗资巨大,任何国家都无法独立实现该宏伟目标,多国合作是必然选择,是发展趋势。
(2)该全球合作探索活动实为美国主导,旨在建立新的空间联盟
虽然ISECG秘书处设在ESA,《全球探索路线图》也是由NASA和ESA共同领导制定,但由于美国在载人航天技术领域的领导地位,欧洲也没有全面掌握载人探索的核心能力,显然多国合作探索的目标和方案都是以美国为主导制定的。不难看出,无论是合作框架还是路线图,语气和做法都充分体现了美国的意图,是与其之前反复强调的空间新秩序相一致的。因此,全球探索战略也是美国建立空间新秩序,构建新的空间联盟,保持其航天领导地位的措施之一。
(3)中国在“全球合作空间探索”活动中地位孤立,需积极应对
2007年《全球探索战略:合作框架》的签订是有中国参与的,但2011年公布的《全球探索路线图》中12个参与国却没有包括中国。美国2011年初的《美国国家安全空间战略》将中国说成是不负责任的国家。2011年的国务院文件和2012年出台的1248号报告,对中国航天技术出口全面封锁。同时《全球探索路线图》中指出,要依据“信任机制”逐渐吸纳新的参与者,这是否意味着意在排斥中国,孤立中国?
面对美国有意孤立中国的情况,中国应积极应对,建议采取以下措施:一是加强多部门协调,拟定我国空间探索领域中长期发展规划,并开展相关配套政策研究,加强载人航天和空间探测的协同发展,指导我国载人航天和空间探测可持续发展;二是发布我国空间探索领域中长期规划,增加透明度和信任度,树立我国作为负责任大国的形象,为开展国际合作创建更好的政治环境;三是制订国际合作的政策和策略,协调中美、中俄、中欧以及与亚洲国家的航天合作,尤其在空间探索领域,积极努力参与全球空间探索活动的协调和讨论,利用国外先进技术,加速我国空间探索领域技术的发展。
