单柄DP控制系统设计
2012-08-10陈相友
陈相友
(日照港轮驳公司,山东日照 276826)
0 单柄DP全回转设备控制系统基本原理
单柄DP全回转设备控制系统基本原理是由操纵台上单柄倾倒、带动操纵台下X轴方向电位器(或同步马达)和Y轴方向电位器(或同步马达)产生位移,变换成X和Y轴上的电信号,而后把信号送入控制计算机,进行运算、比较、放大,控制电磁阀动作,使液压马达旋转,再通过蜗轮杆带动导流管螺旋桨按设定方向运转[1]。单柄DP全回转设备控制系统原理图如下:

图1 单柄DP全回转设备控制系统原理图
1 系统设计步骤
由于装置是船舶航行的操纵装置, 必须具有极高的可靠性和抗恶劣环境能力, 为此采取了下述有效步骤:
1.1 硬件没计
1) 计算机采用“软”总线结构,使计算机内核部分和外围通道隔离,外围通道设备一旦发生故障或损坏,对计算机内核部分的影响或损坏减小到最低。
2) 使用可靠性高的半导体存储器。
3) 采用有源滤波器,减少各种各样干扰引起的伪信号。
4) 低阻抗的线路设计,使电路在湿度大的情况下也能正常工作。
5) 采用二阶无差度伺服系统的同步三相模拟量到数字量转换的先进技术。
6) 控制系统抗强干扰接口。
1.2 软件设计
1) 采用数字滤波技术。
2) 采用较强的容错技术,它对外界干扰引起的差错和自身偶然差错必须有自动纠正能力,以保证装置正常工作。内容包括:自动复位技术;对各种数据、控制字和命令的自动检测技术,自动纠错技术;三次检查后不能纠错的自动报警技术,堆栈混乱自动修正技术,输入 输出快速刷新技术。
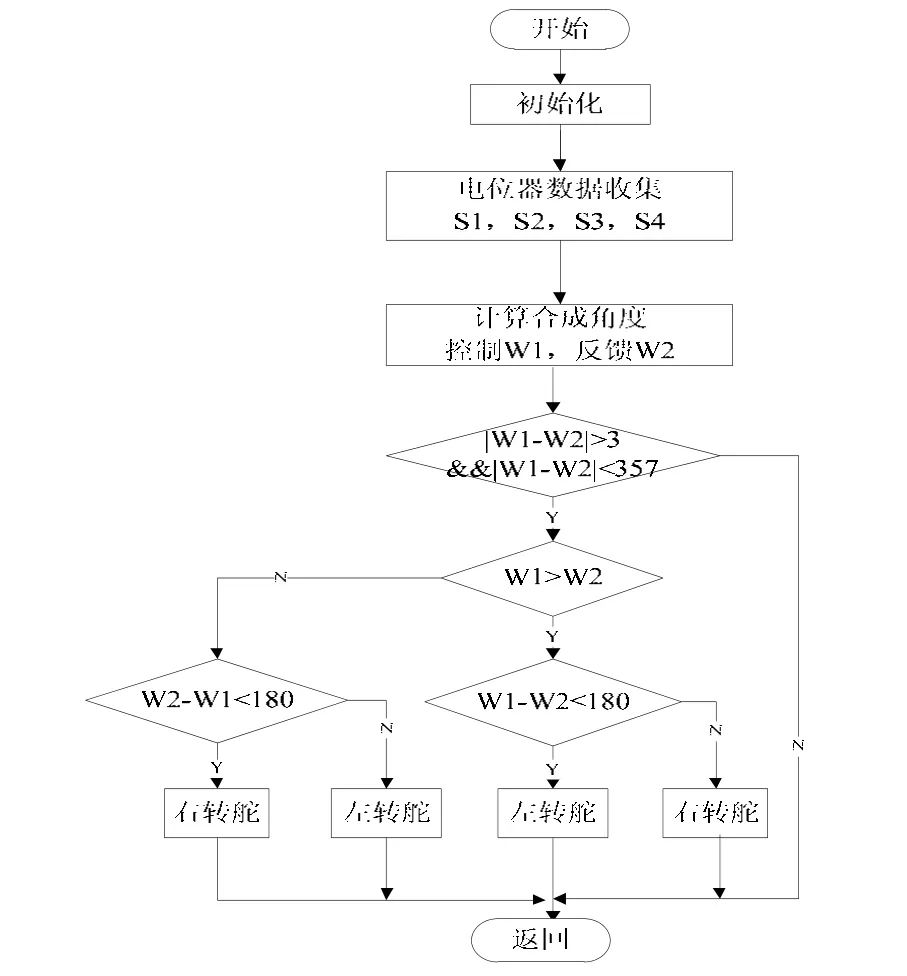
图2 软件流程图
2 系统设计原理分析
舵桨回转控制系统的核心是微机控制系统[2]。微机控制系统包括发送控制信号的传感器和发送反馈信号的传感器,微机控制器,多路转换器,以及舵桨转角指示装置。微机控制系统的控制对象是液压系统的三位四通电磁阀(控制舵桨的转动方向和转动/停止),以及二位三通电磁阀(控制舵桨的快慢速转动):微机与电磁阀之间的连接就是通过多路转换器实现的[3]。微机的多路转换器安装在驾驶室的操纵台内。为了抗干扰,在系统中设置了“看门狗”,在位置信号传输过程中采用了V/F转换。输入输出电路中采用了光电隔离。
为了实现一只手柄操纵左右两台舵桨。设置了一套单手柄操纵器,它包括一组单手柄操纵头和装于左右舵桨上的两套检测设备。操纵头实际上是一组结构简单的万向机构,在操纵头内按X轴和Y轴方向布置4只传感器:其中两只(X轴方向的1R1和Y轴方向的1R2)接微机,另两只(X轴方向的2R1和Y轴方向的2R2)接微机。各只传感器的转动轴,均由安装在万向机构轴伸端的小模数齿轮驱动,借助这套机构,可将操纵手柄朝各个方向的位置移动,变化成各只传感器的角位移。当手柄前后倾斜时1R1和2R1转动;而手柄左右倾斜时,1R2和2R2转动。当手柄转向任意时,四只传感器都将转动。手柄自垂直位置向任意方向倾斜的最大角为30度。

图3 单手柄原理示意图
CPU控制板(简称主板),接口为160pin管脚。详细由:8086CPU,程序存储器(EPROM),数据存储器(RAM),串口驱动器,中断控制芯片,时钟芯片,译码器和锁存器,以及12bit-ADC、74系列逻辑变换电路,参考电压源、运放调理电路等组成。
输入输出接口板(简称I/O板),接口为160pin管脚。详细由:运放振荡电路,运放比较和放大电路,运放跟随电路,光耦隔离驱动电路,达林顿驱动电路,LED逻辑指示电路,SDC模块(自整角机到数字转换模块),保护电路和电源组成。
单手柄操纵器的手柄被扳动时,它所联接的两个传感器就分别输出电压信号,它们被传送至“指令信号转换板”,将电压信号转换为频率信号(即V/F转换),然后再输送到微机控制系统。控制系统对频率信号计数和运算,就得到了两个传感器转轴的角度位置,经过运算得出操纵手柄的当前位置。再查表根据“控制规律”进行运算,结合反馈的信号舵角信号进行判断,确定左、右舵桨应该转到什么角度位置。
同时,传感器根据舵桨的当前位置输出电压信号,送到集成的反馈信号“IO板”,将电压信号转换为12 bit并行数字信号,然后传入控制系统中。此信号经微机计数和运算后,得到反馈信号传感器转轴的当前位置,同时也得出了左、右舵桨的当前位置。再将左、右舵桨的当前位置与应该转到的位置分别进行比较,即可得出每一舵桨应该转动的角度和应该转动的方向单片机的运算部件得出左、右舵桨应该转到的角度和转动方向后,立即通过输出接口的大功率三极管(达林顿管),向三位四通电磁换向阀中的相应电磁铁输出电流,使滑阀朝着所要求的方向移动,接通液压马达油路,由它驱动舵桨回转。
舵桨带动检测箱中的反馈传感器转动,随时改变着输入微机的信号:单片机不断地算出舵桨转动中的瞬时位置,并将此位置与应该转到的位置进行比较,一旦这两种位置相同了(实际上是两者的差值小于一个预定的误差值时,即认为两者相同了),输出给电磁换向阀的电流就被切断了,于是滑阀在弹簧的作用下回到中间位置,舵桨就停在所要求的位置。上述控制过程的程序动作是:左,右舵桨同时开始转动,谁先到达所要求的位置,谁就先停;另一台则继续转动,达到所要求的位置后才停下来。

图4 单手柄控制规律图
上图中所示的左桨和右桨反馈值分别为:Pf和Sf。左、右桨转角(位置)与其对应的反馈值Pf和Sf的关系,设手柄在Y轴上从中心推到正车全速。
给出对应的电压值PTy从0 V~10 V。相应的桨转动的角度为0°- 90°,左桨对应的反馈电压值为5 V~7.5 V。所以螺旋桨每转过1°,反馈值变化(2.5 V/90°=0.0277 V。手柄位PTy与螺旋桨应转角度反馈电压值Pf(Sf)的关系为:

若手柄推到第一象限任意位置时,由单手柄位置与左右桨转角的关系可以得出公式:

左、右桨转过的角度应为如下两部分之代数和:

该系统是带有反馈装置的闭环控制系统,控制电位器安装在由驾驶人员操纵的手柄上,舵角反馈电位器安装在全回转舵桨上,与舵桨本体同步回转。控制电压和反馈电压经滤波处理后送入单片机。在单片机内进行A/D转换和角度运算,然后由单片机输出左转或右转(即左舵和右舵)的控制信号,经过隔离驱动电路,控制液压电磁阀,最终由液压执行机构驱动舵桨回转。
选用精密导电薄膜旋转电位器作为控制和反馈传感器,由于全回转舵桨360匠死区连续回转,而一般的旋转电位器都有死区,因此选用双联同轴电位器,上下联错开精确的角度,互相覆盖死区,上下联的输入信号通过软件计算为连续的角度,实现无死区的控制。
隔离驱动电路。由于电磁阀属于电感性负载,为避免其干扰,在实际控制中采用光耦和大功率固态继电器进行隔离放大驱动。转舵控制信号由单片机的口输出,经光电耦合器隔离后,送入固态继电器K1和K2,由固态继电器直接驱动电磁阀。
3 结论
本系统研发设计在国内领先,系统研发过程中突破了多项关键性技术,如:计算机采用“软”总线结构,采用二阶无差度伺服系统的同步三相模拟量到数字量转换的先进技术,采用数字滤波技术,自动复位技术;对各种数据、控制字和命令的自动检测技术,自动纠错技术;三次检查后不能纠错的自动报警技术,堆栈混乱自动修正技术,输入、输出快速刷新技术等。研发试验成功后,可以有效取代对日本技术的依赖,可以缩短备件采购周期、节省费用、保障船舶设备安全,可以达到国内领先水平,创造广泛的社会效益和经济效益。
:
[1]Niigata Instruction manual. Japan, 2010.
[2]姜锦范. 船舶电站及自动化. 大连:海事大学出版社,2005.
[3]孙旭清 何吉庆. 船舶电机与电气控制系统. 大连:海事大学出版社, 2009.
