基于机器视觉的LED芯片检测方法
2012-08-08宋黎明袁秋林
宋黎明,袁秋林
(1.河南师范大学 计算机与信息技术学院,河南 新乡 453007;2.河南师范大学 物理与信息工程学院,河南 新乡 453007)
目前,LED芯片自动化生产设备主要依靠进口,价格昂贵,不利于行业的发展。一些中小企业的生产还停留在手动或者半手动的状态,效率低下。国内在LED芯片自动化生产设备领域还处于研制阶段,还没有完全自主知识产权的产品,因此,加快其关键算法的研究势在必行。
在LED生产过程中,LED芯片的检测定位是关键技术之一[1]。通过计算机自动定位LED芯片可以有效地降低工人劳动强度,并大大提高工作效率,从而节省大量的人力物力成本。在现有条件下,通过安装在生产线上的摄像头自动捕捉到LED芯片图像,对图像采用计算机视觉技术进行分析,可以精确地获得LED芯片定位信息(包括芯片的倾斜角和位置),用这些定位信息可以控制LED芯片的自动焊接。
本文讲述了基于机器视觉的LED芯片定位算法。首先,对采集的图像进行预处理,减少噪声,并定位出芯片区域和焊片区域;然后基于最小外界矩形定位出芯片的倾斜度;最后,通过直线检测算法定位出芯片区域边界直线和焊片区域边界直线,用这两条直线定位出芯片在传送带上的位置。实验结果表明,定位算法获得这些参数可以用于LED芯片生产的焊接控制。
1 预处理
由于在图像采集过程不可避免地产生随机噪声,因此在获取芯片定位参数前首先要对图像进行预处理,去除影响识别精度的噪声。此外,为了更好地获取芯片边界信息和焊片边界信息,需要通过预处理分别提取两者的区域。
原始图像中存在的噪声主要为小的裂纹和斑点,采用形态学开操作先对图像进行腐蚀操作以消除小的裂纹和斑点,然后采用膨胀操作得到边界光滑的目标图像。A被B腐蚀定义为[2]:

A被B膨胀定义为[2]:

结构元素B对集合A进行开操作定义为[2]:

去噪后的图像通过区域分割处理可以得到芯片区域和焊片区域,便于下一步获得定位信息。芯片区域和焊片区域由于材料的不同导致在图像中亮度也有很大的不同,因此采用局部阈值分割的方法[3-4]。首先设定阈值分割出前景图像,然后设定前景图像的局部阈值分割芯片区域和焊片区域,分割效果如图1(其中芯片区域阈值为0.2,焊片区域阈值为 0.5)。
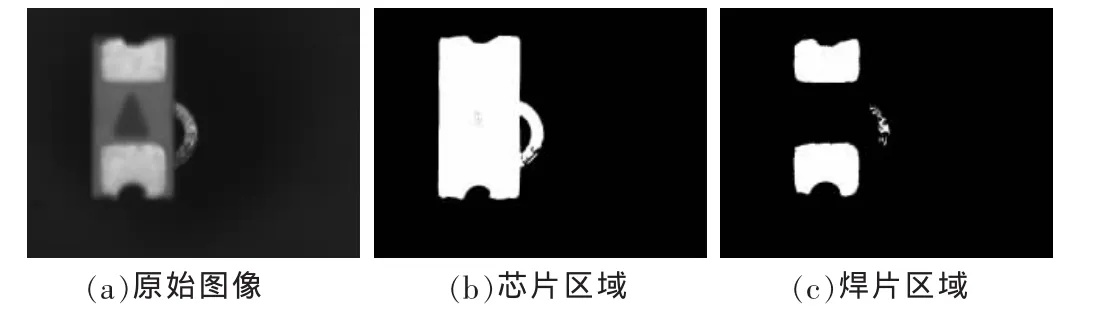
图1 预处理图像
2 LED芯片定位算法
2.1 基于最小外接矩形求倾角
芯片区域接近于矩形,芯片的倾斜角不同则外接矩形的面积也不同,当芯片垂直放置或水平放置时,外接矩形的面积最小[5]。因此,可以通过 0°到 90°旋转芯片区域图像,记录其外接矩形面积,当面积最小时即为芯片的倾角。算法如下:
(1)记录芯片区域外接矩形的面积;
(2)顺时针旋转芯片图像 3°;
(3)重复第(1)步和第(2)步,直到芯片被旋转 90°;
(4)查找外接矩形面积最小时,旋转的度数即为芯片区域的倾斜角。
图2为两幅根据预处理后芯片区域求得的最小外接矩形。两个芯片的倾斜角分别为0°和3°,与实际放置的结果相符合。
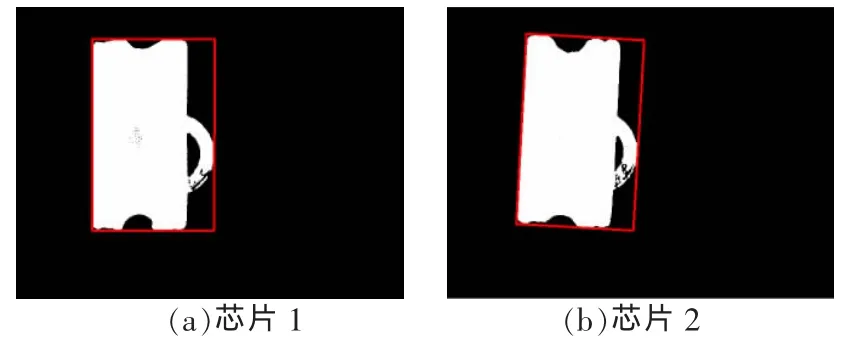
图2 基于最小外接矩形求倾角
2.2 基于霍夫变换求边界
霍夫变换的核心思想是将参数空间分割为累加器单元,在同一累加器单元中的点即为同一条参数曲线上的点。在定位LED区域边界时,使用式(4)的直线参数方程,统计 θ(取值±90°)和 ρ(取值D,D是图形对角线的长度)分割的参数空间累加器,点数最多的θ和ρ单元即对应定位所需的边界直线方程。同时,可以根据已经求得区域倾角对直线进行验证。

图3为区域边界定位的结果。图3(a)为芯片区域;图3(b)中直线为采用霍夫变换求得的芯片区域边界上的直线;图 3(c)为焊片区域;图 3(d)中直线为采用霍夫变换求得的焊片区域边界上的直线。根据矩形倾角和区域中心可以判断求得直线所代表的区域边界位置。
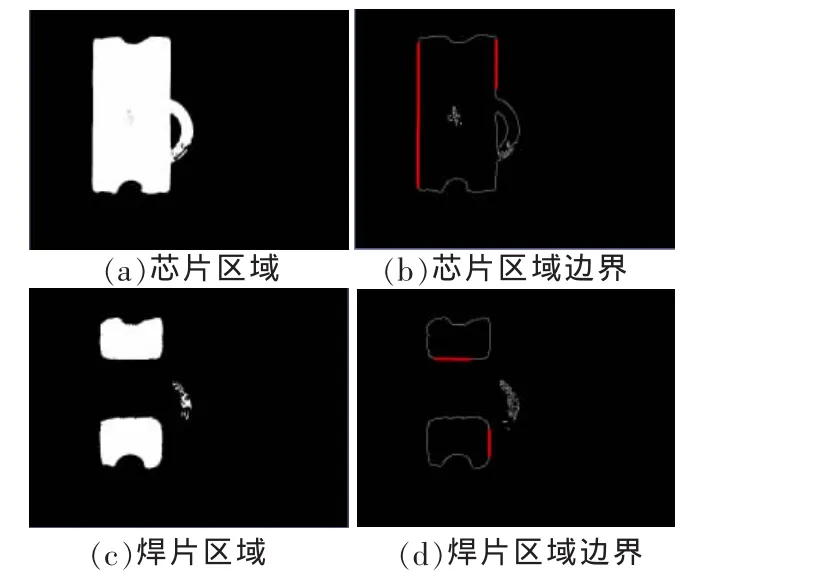
图3 基于霍夫变换求边界
3 实验结果
利用本算法对 254张 640×480的图像进行 LED芯片定位,并用求得的定位参数对LED芯片焊接进行控制,成功自动焊接247个芯片,7个芯片产生告警信号后由人工处理(对于由于图像质量过差无法处理的图像算法返回告警信号)。算法处理单张图像时间<100 ms,满足每秒控制3个芯片焊接的生产要求。
本文基于实时采集的LED芯片图像研究了LED芯片的定位问题。经过对图像的预处理、基于最小外接矩形求倾角、基于霍夫变换求边界,获取了LED芯片的定位参数,用这些参数可以控制LED芯片的焊接。实验表明该算法适用于LED芯片的生产过程。
[1]张碧伟.LED晶粒全自动分拣机的开发研究[D].西安:西安工业大学,2011.
[2]冈萨雷斯.数字图像处理(第二版)[M].北京:电子工业出版社,2008.
[3]杨军,吴晓娟,彭彰,等.基于多区域分割的步态表示与识别算法研究 [J].计算机学报.2006,29(10):1876-1881.
[4]彭兴邦,蒋建国.一种基于亮度均衡的图像阈值分割技术[J].计算机技术与发展,2006,16(11):10-12.
[5]JUNG C R,SCHRAMM R.Rectangle detection based on a windowed hough transform [C].Proceeding ofthe 17th Brazilian Symposium on ComputerGraphicsand Image,2004:113-120.