基站距离对lidar高程精度影响的探讨
2012-08-06黄华平林国庆刘建军缪志修
黄华平 林国庆 刘建军 缪志修
(中铁二院测绘工程设计研究院,四川成都 610031)
1 概述
机载激光雷达测量技术是一门集激光测距、GPS测量、IMU姿态测量技术于一体的主动式测量技术,已广泛应用在公路、铁路和石油管道勘测设计,以及电力巡线、三维数字城市等方面。
机载激光雷达测量技术之所以能够快速获取地面物体精确的三维真实坐标,主要是依靠GPS(机载GPS+地面GPS基站)测量出飞机的飞行轨迹,IMU测量出飞机的瞬时飞行姿态参数,然后利用卡尔曼滤波技术对差分GPS数据和IMU姿态测量数据进行联合数据处理,得到每一个激光脚点的精确坐标。基于IGS参考站精密星历和精密钟差改正的PPP(Precise Point Positioning)解算技术可以省去地面GPS基站的架设和测量,而且可以节省不少成本,是近年测绘界研究热点。但采用PPP解算技术可能导致精度降低和不稳定,在工程中还是很少有人敢于使用。因此,地面GPS基站的布设就显得非常重要。利用工程项目中的真实数据进行统计分析,就实际生产中地面GPS基站架设距离对Lidar测量高程精度的影响进行探讨,希望对特殊情况下Lidar测量中地面GPS基站架设距离设定有一定的参考作用。
2 影响Lidar测量高程精度的因素
Lidar系统是一个复杂的集成测量系统,影响精度的因素非常复杂。正常情况下,影响高程精度的主要因素包括激光测距误差、GPS动态定位误差、IMU姿态测量误差、系统集成误差以及由于平面误差引起的二类高程误差等。
激光测量的精度本身就很高,加上Lidar系统在通过厂家检校消除大的误差后,在常规测量中的精度基本可以达到厘米级。IMU测角误差以POS AV510为例,可以达到0.008度,对于高程精度的影响在1 500 m飞行高度的情况下处于亚厘米级的水平。系统集成误差主要是IMU、激光传感器、机载GPS等安装完成后各自的参考坐标系坐标轴不平行引起的,通过检校场检校可以有效消除。GPS动态定位误差主要受对流层和电离层延迟、多路径效应、钟差等引起。在众多影响高程精度的误差来源中,GPS动态定位误差是目前影响机载激光雷达测量精度的最主要的误差来源之一,一般为厘米级到分米级[1]。
当前主要采用的GPS差分技术是通过GPS相对定位方式,构建差分观测量来消除对流层、电离层、卫星钟差等误差的影响,从而获得高精度GPS定位结果。随着地面GPS基站距离的增加,对流层延迟、电离层延迟等误差的相关性减弱,GPS差分结果的预期精度将会逐渐降低。GPS测量的高程方向误差一般是平面的2倍,也就直接导致机载激光雷达测量数据高程精度的急剧下降。
3 基站距离对高程精度影响的工程案例分析
3.1 工程案例1
(1)GPS地面基站布设
本项目位于重庆万州地区,整个区域属于低山地区,最大高差约为400 m。摄影采用新引进的加拿大Optech Gemini机载激光雷达系统,实验飞行高度为相对航高1 100 m,激光发射频率为100 kHz,地面激光脚点密度为2~3 dots/m2。
考虑到地面GPS基站距离对Lidar高程精度的影响,直接关系到获取数据的精度能否满足项目要求和项目成本,结合目前国内外实施Lidar摄影时基站距离的经验数据,布设了64 km、36 km、11 km和7 km四个基站。
(2)精度统计分析
为确保精度统计的正确性,在测区内选择了一条1 km长的平整道路,利用全站仪每隔20 m左右测量出高程点的准确高程,测量精度优于5 cm,共测量569个高程点。精度统计见表1。
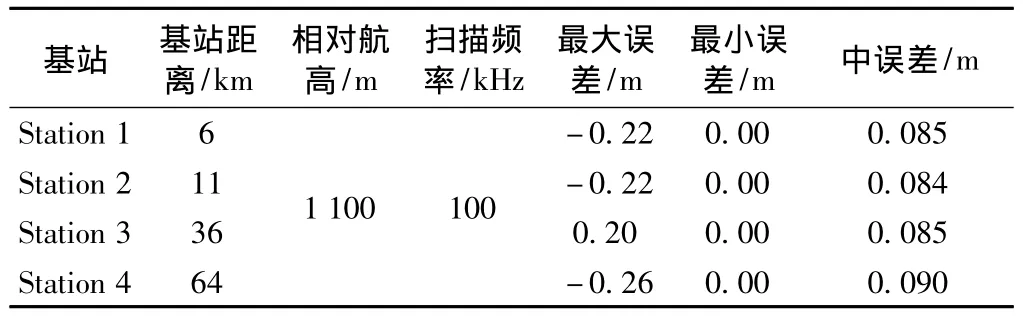
表1 万州项目不同基站距离Lidar高程精度统计
(3)结论
由统计结果可以看出,本项目基站距离为64 km和10 km左右时Lidar高程精度的变化不大,都在同一个数量级,而且都小于10 cm,精度远高于预期精度。分析原因是摄区位于城市区域,Lidar摄影范围内基本为裸露的地面、道路和房屋,没有太多的植被,点云数据经滤波、分类后的高程精度高。同时,检查控制点也都选取在地面明显的地物点上,测量和辨认精度也非常高。
3.2 工程案例2
(1)GPS地面基站布设
本项目位于东南亚地区,全线320余公里区域内植被比较发达,热带灌木丛非常多,地形等级从Ⅰ级到Ⅳ级(山区Ⅳ级地形居多),最大高差约为1 500 m。摄影采用Leica ALS50II机载激光雷达系统,实验飞行高度为相对航高800~1 000 m,激光发射频率为125 kHz,地面激光脚点密度为3~4 dots/m2。
由于地形条件所限,很多地方属于荒无人烟的原始森林地区,基站距测区距离40~60 km(最远处约63 km),全线共布设7个地面GPS基站。
(2)精度统计分析
由于本项目Lidar摄影过程中现场勘测工作正在进行,检查控制点选用了勘测中实测的线路中桩点成果,全部成果均使用GPS RTK测量,高程精度优于5 cm,检查点在不同的两个区域。精度统计见表2。
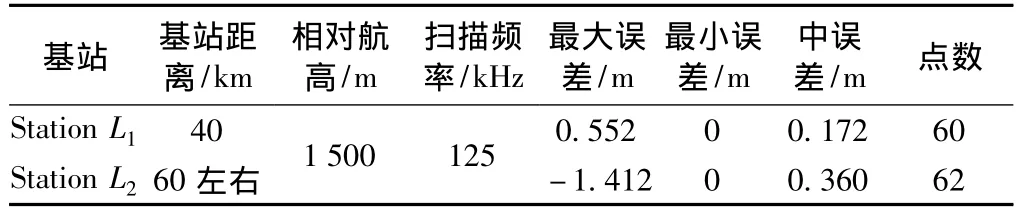
表2 东南亚项目不同基站距离lidar高程精度统计
本项目中精度统计是成果转换至正常高后进行的,误差中包含大地高至正常高的转换误差。同时,测区内植被覆盖严重,Station L2检查范围内最大误差-1.412 m出现在树林内,滤波分类精度较差,而且高程较差小于1倍中误差的为67%,小于2倍中误差的占95%。
(3)结论
从统计结果来看,当地面GPS基站距离达到60 km以上后,精度有明显下降,排除植被影响,仍然在可以接受的范围内,大部分可以满足铁路勘测设计的精度要求。当然,对于植被覆盖茂密的区域,Lidar成果还需要现场核实和修测,以保证最终成果满足要求。
3.3 工程案例3
(1)GPS地面基站布设
本项目位于我国新疆天山地区,全线200余公里区域内基本没有植被,属于沙漠戈壁地区过渡到山区,地形等级从Ⅰ级到Ⅳ级,最大高差约为1 400 m。摄影采用Optech Gemini机载激光雷达系统,飞行高度为相对航高1 500 m,激光发射频率为100 kHz,地面激光脚点密度为1~2 dots/m2。
(2)精度统计分析
本项目在测区内选择了平坦河道区域,利用GPS快速静态方法测量了多处检查散点(每处约30点左右),外加沿线高等级控制点,高程测量精度均优于5 cm。精度统计见表3。
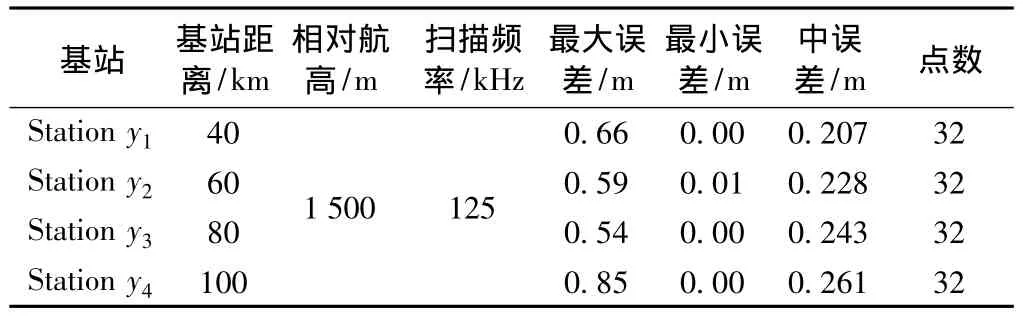
表3 新疆项目不同基站距离Lidar高程精度统计
本项目统计均采用gps大地高成果,误差不含高程转换误差,统计检查点范围无植被覆盖,点云滤波分类精度较高。在距离达到100 km的时候,高程较差小于1倍中误差的为64%,小于2倍中误差的占94%。
(3)结论
从统计结果可以看出,本项目中当基站距离在40~100 km范围变化时,Lidar点云的高程精度的虽然有所下降,但不太明显,都在同一数量级,而最大误差值有0.2 m的变化。单纯从中误差的角度来看,仍然满足铁路勘测设计的要求。
4 结束语
各品牌Lidar系统厂家推荐的测区至基站距离都在30 km左右,目前各单位在进行Lidar摄影时普遍采用30~40 km的基站控制范围,以确保Lidar摄影成果能够达到1∶2 000甚至1∶500成图的精度要求。但是,出于成本考虑或者在特殊情况下基站布设困难时,适当加大基站的距离,Lidar摄影成果的高程精度仍然能够满足工程项目对高程精度的要求。当基站距离较远时,为提高lidar成果的高程精度,建议在Lidar系统完成初始化进入测区时,选择靠近基站端进入,然后开始摄影,确保POS系统初始化精度高,利于提高摄影成果的整体精度。
适当加大距离对于高程精度的影响不会太大,但各地地形条件以及GPS信号好坏等因素复杂多变,在基站距离选择上要根据具体应用要求和现场实际情况而定,摄影的时间也要选择避开GPS信号不好的时段,争取最好的预期精度和合适的项目成本。
[1]张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007
[2]刘经南,张小红,李征航.影响机载激光扫描测高精度的系统误差分析[J].武汉大学学报,2002(2)
[3]刘基余,李松.机载激光测深系统测深误差源的研究[J].武汉大学学报,2000(6)