高速列车横向振动自适应神经模糊控制的仿真
2012-08-03成新明唐启志
成新明,唐启志
(中南大学 信息科学与工程学院,湖南长沙410083)
随着列车速度的提高,铁道车辆振动也逐渐增大,并将做多自由度的随机振动,从而列车运行的安全性、平稳性和舒适性也随之下降。传统铁道车辆的被动悬挂方式虽然能在一定程度上满足铁道车辆动力学性能的要求,但局限性在于其悬挂特性仅与连接悬挂元件的局部相对运动有关,且其悬挂特性在车辆运行过程中不能随激励的变化而任意进行调整,这就限制了机车车辆性能的提高,同时也使得列车不能适应复杂的运营线路。半主动悬挂系统结构简单,无须力源,成本和维护费用较低,能有效地改善机车车辆横向动力学性能,目前是列车提速并改善其横向平稳性的有效方法[1-2]。迄今为止,国内外学者在半主动悬挂控制策略方面做了大量的工作。而选择合理的控制策略实现减振器阻尼的调节是控制的关键。应用于车辆半主动悬挂控制系统的控制策略主要有线性最优控制、鲁棒控制、自适应控制、预测控制、模糊控制和神经网络控制等[3]。对于这些控制方法,都有自己的优缺点。就模糊控制和神经网络控制来说,模糊控制的缺点是控制精度低、控制规则难建立,当控制规则确定后又不会改变,这就导致了模糊控制的自适应能力差。而尽管神经网络能够逼近任意非线性函数,在半主动悬挂系统中用做控制器和辨识器具有自适应能力和较强的学习功能,但神经网络算法比较复杂,收敛速度无法很好地保证,实时性不好。
本文提出了把模糊控制和神经网络控制相结合的方式,充分利用模糊控制的强推理能力和神经网络控制的强自学能力。神经模糊控制被视为神经网络和模糊控制之间的灰盒技术,它可以有效的解决非线性强,精确模型难建立的问题[4]。神经模糊控制应用于半主动悬挂系统,这在一些文献中也有所研究,如文献[5]就是把神经网络根据振动响应的方差递推结果来辨识车体的振动情况实时调节模糊控制器的量化因子,使模糊控制器对路面的变化具有自适应能力,但研究结果对于轮轨突变的激励控制效果不是很明显。而在本文中,神经网络是对动态采集的数据进行训练,在训练过程中不断调节模糊控制的控制参数,从而来改变控制规则,使控制规则能够随着路面的变化而变化。这种设计不仅可以减少列车的振动,而且还能适应模型建立不精确、传感器测量不准确等情况,不断提高控制器的自适应能力。
1 列车半主动悬挂的数学模型
本文研究的是1/2车辆模型横向振动的半主动悬挂控制系统,因此将车辆模型进行简化[6]:忽略车轮和轨道的非线性蠕滑作用,车体的弹性模态、钢轨的弹性、轮对的扰动等因素,只考虑车辆的横向振动,即考虑列车的车体,转向架和轮对的横移运动,分别用yc,ya,yt来表示。其横移微分方程为:
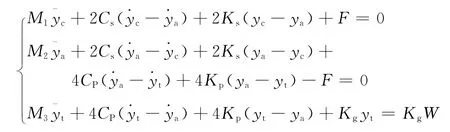
各参数如图1所示。其中M1为整个列车车体质量的一半;M2为一台转向架的质量;M3为两对车轮的质量;CP,CS分别为一系悬挂和二系悬挂横向阻尼系数;Kp,KS分别为一系悬挂刚度和二系悬挂刚度;Kg为车轨刚度;F为控制器输出的可变阻尼力;W为轮轨的输入激励,包括轨道的方向不平顺和水平不平顺。
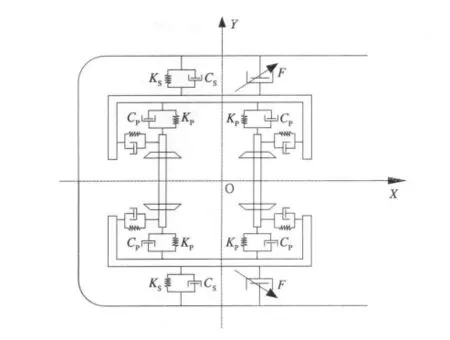
图1 列车半主动悬挂模型
2 列车半主动悬挂自适应神经模糊控制策略的设计
在半主动悬挂控制方法的研究领域,大多数的研究人员并不是长期在现场调试减振器的操作专家,因此并不能根据经验和直觉制定模糊规则。即使是经验丰富的操作专家,对于一些复杂的操作系统,也不能仅凭直观经验制定控制规则,并且凭经验得到的模糊规则含有很多的主观因素,不一定能够满足控制的要求。
在列车半主动悬挂系统中,针对模糊控制的控制规则建立难这一难题,提出了把神经网络嵌入到模糊控制器中,在通过神经网络对理想数据进行自我学习的基础上,调节模糊控制器的隶属函数和输出参数,来得到列车半主动悬挂系统的模糊控制器。为了让模糊控制器能使列车在不同的激励下产生合适的阻尼力,设计的神经网络一直对列车车身的横向加速度和半主动悬挂的动挠度(车身和转向架之间的速度之差)进行采集,采集的数据经过模拟仿真得到合适的阻尼力,然后把加速度、动挠度和阻尼力这三者数据输入到神经网络中进行训练,通过反馈传播神经网络控制改变模糊控制的控制规则,最终得到车辆半主动悬挂控制系统的自适应神经模糊控制器,其中控制原理图如图2所示。
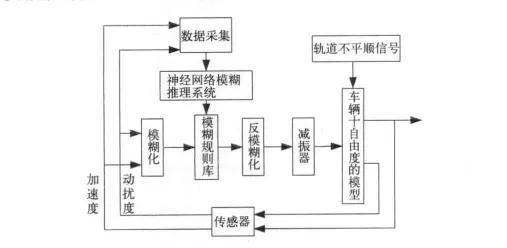
图2 自适应神经模糊控制的原理图
2.1 自适应神经模糊推理系统的设计
针对于普通的模糊控制规则建立难和需要靠人的思维一次一次调整隶属函数才能达到减小误差、增进效能的缺点,本文借助于神经网络的自学习功能对模糊控制器进行改善,利用神经网络的反向传播算法和最小二乘法来完成对输入—输出数据对的训练,从而建立起一套if-then的规则,慢慢调配出适当的隶属函数来满足所需推论中输入输出的关系,但此自适应神经模糊控制只适用于Sugeno型模糊控制。自适应神经网络模糊推理系统(ANFIS)的结构图如图3所示[7-8],其中X1,X2是系统的输入,y是推理系统的输出,均为提供的数据对。网络同一层的每个节点具有相似的功能,用Y li表示第1层第i个节点的输出,依此类推。此结构分为5层:
第1层为输入信号模糊化,其中Ai,Bi为模糊集,μA i(x i)是模糊集的隶属函数,每个节点对应的输出可表示为:

第2层为实现规则运算,输出规则的适用度,规则运算采用乘法:

w i为每条规则的激励强度。
第3层为节点进行各条规则适用度的归一化计算。
第4层用于计算各条模糊规则的输出:

式中y i为一阶的Sugeno型模糊控制的输出,p i,q i,r i为结论参数。
第5层的单节点是一个固定节点,计算输入信号的总输出:

在自适应神经模糊算法的混合学习过程中,前向学习到第4层,推论的参数p i,q i,r i由最小二乘估计法求得,通过反向学习的最大梯度法,返回误差变化率以更新参数p i,qi,r i。在改变这些参数的过程中,各种对应A i与B i的隶属函数参数就随之改变,从而使控制器具有自适应能力。
图3 自适应神经网络的模糊推理系统结构图
2.2 数据的采集及训练
在列车半主动悬挂自适应神经模糊控制器中,训练数据的采集是很重要的一步,首先建立轨道不平顺输入(包括水平不平顺和方向不平顺)和半主动悬挂仿真模型,然后构造评价函数,本文的评价函数是车身的加速度和动挠度这两个性能指标值进行组合得到的,它们满足以下公式:

其中J为评价函数;β为权值参数,是介于[0,1]之间的实数,其值大小直接反映对加速度和动扰度的加权程度,在本文中β值取0.6;a为车身的加速度;νc-νa为动扰度。评价函数确定之后,然后就是对数据采集进行编程。数据采集的程序有两个嵌套的循环构成,外层循环控制仿真的步长,在本文中设置的步长为0.01 s。在仿真时间为10 s的时间内,总共得到1 000个有效的数据。内层循环是得到一个合适的阻尼力,阻尼力从最小值(Fmin)开始变化,一直变化到最大阻尼值(Fmax),把每一次阻尼值输入到车辆半主动悬挂模型进行仿真,得到的输出结果由评价函数进行比较,把评价函数值最优的阻尼力保存下来,作为在当前激励下的最优阻尼力,程序的流程图如图4所示。把采集的数据输入到ANFIS进行训练,通过ANFIS的逆向学习方式不断调节一阶T-S模糊系统的输出参数,从而来达到随着路面变化来改变模糊控制器内部规则的目的,使模糊控制器对路面情况具有一定的自适应能力。
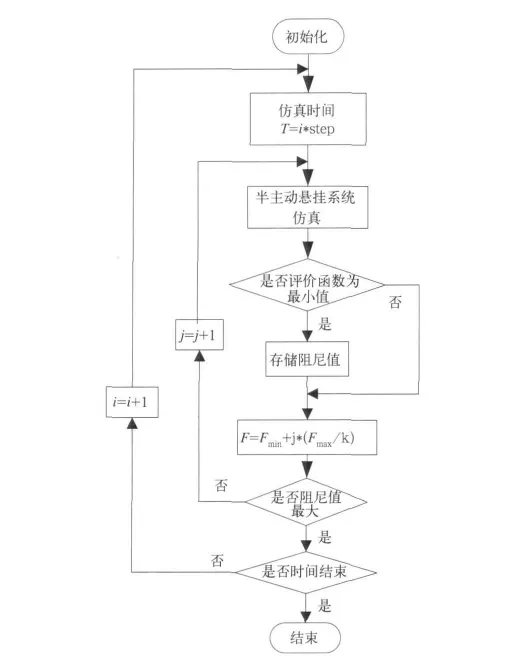
图4 数据采集程序流程图
3 车辆性能评优标准
乘客乘坐车辆时,车辆在做连续的振动,时间一长会使乘客感觉疲劳,还有可能引起乘客的身体不适,经过大量研究数据表明,人对于低频振动很敏感,就横向振动而言,人体对频率在2 Hz以下的振动最敏感;为了建立一个标准来对车体的振动进行评估,提高乘车舒适度和平稳性,本文采用一种比较直接的方式——求加速度均方根的方法来对乘坐的平稳性进行评估,具体的计算公式如下:

ave为加速度均方根值;a(t)是在时间T1和时间T2段内采集的列车车身的加速度。
同时对车辆的性能进行评价时,除了加速度的大小这一因数外,加速度的振动频率也是一个很重要的因数。为了更好的对仿真结果进行对比评优,本文还采用了国际上对高速列车悬挂性能评估的常用指标——斯佩林(Sperling)指标,用W表示其指标,计算公式为[9]:

式中H为振动加速度;f为振动频率;F(f)为与振动频率相关的修正系数,其值如表1所示[9]。

表1 频率修正系数
根据每一组的平稳性指标Wi得到整个波形的平稳性指标W∑:

由指标W∑的值来评价平稳性的等级如表2所示[10]。
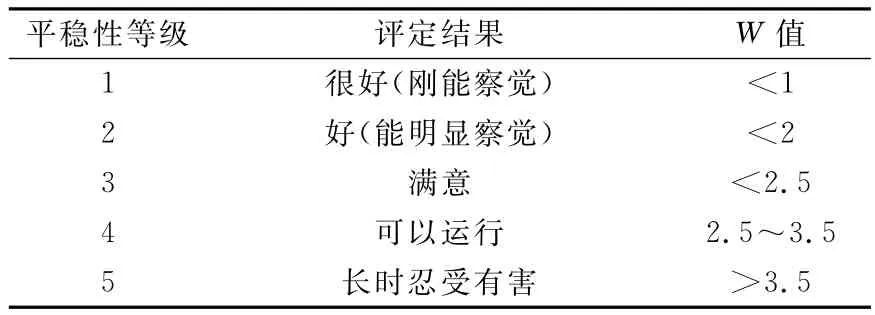
表2 车辆运行舒适度指标与等级
4 仿真结果
控制系统设计时,为了和实际系统相吻合,仿真时考虑了如下3点:
①对于控制系统而言,时滞是不可避免的,所以在建立模拟系统时设置了控制系统的延迟时间Δt为10 ms;
②根据实际情况,列车半主动悬挂系统中的阻尼值有一个范围,即在仿真时设置了阻尼器的最大阻尼Fmax和最小阻尼Fmin,阻尼器的阻尼值在这两者之间进行不断的变化。
③在列车半主动悬挂系统中,根据天棚阻尼原理(阻尼力的方向总是和车身振动速度的方向相反),使产生的阻尼力总是对半主动悬挂系统做负功。但我们测得的是列车的转向架和车身的相对速度,所以只能设计接近于天棚阻尼控制器的阻尼力,在仿真时设计的阻尼力的控制规则为:

F为阻尼力;vc为车身的速度,va为转向架的速度。当vc(vc-ca)>0时,阻尼控制器做负功,能够减弱车身的横向振动,当vc(vc-ca)≤0,为了不使阻尼控制器做正功,所以关闭阻尼控制器,使阻尼力为最小值。
通过MATLAB对整个系统进行仿真,同时考虑以上3点,仿真结果如图5至图9所示,各类型的性能值如表3所示。从图5、图6可以看出,基于神经网络模糊控制的半主动悬挂系统的横向振动加速度明显小于被动悬挂系统。由表3可以看到,车辆横向振动加速度的峰值由1.045 8 m/s2降低到0.580 8 m/s2,改善了44.5%,其均方根由0.258 99 m/s2下降到0.105 66 m/s2,改善了59.2%。平稳性也从2.07下降到1.56,从表2可以看出平稳性等级由2级变为了1级。从图7和图8可知,经过控制后的半主动悬挂的动扰度有所增加。这是因为半主动悬挂的阻尼器所提供的阻尼力与动扰度成正比,方向与相对振动速度成反比,由于动扰度是振动加速度的积分做差求得,因此动扰度的相位滞后振动加速度相位90°,当振动加速度减小时,动扰度却有稍微的增加。图9为被动控制和半主动悬挂控制车体中心加速度的功率谱对比图,从图中看出半主动控制减振装置在1~20 Hz的振动成分明显低于被动控制的减振器,而这段频率包括了影响列车乘坐舒适度比较大的频率段。

表3 列车横向振动的性能参数
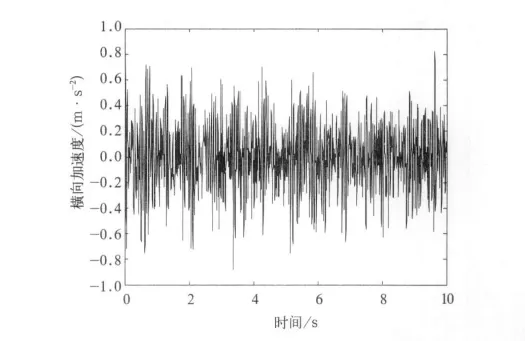
图5 被动悬挂系统横向振动加速度

图6 神经网络模糊控制的半主动悬挂加速度
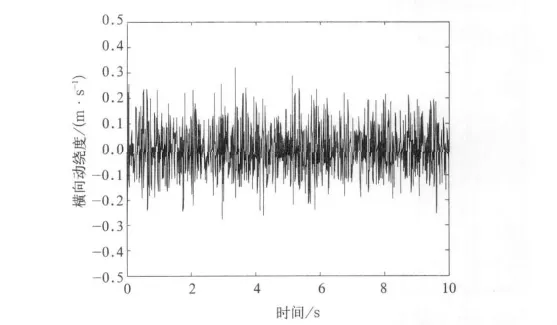
图7 被动悬挂车体横向振动动扰度

图8 半主动悬挂车体横移振动动扰度
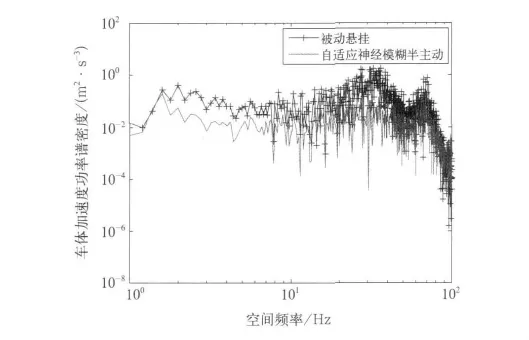
图9 车体横向加速度功率谱
5 结束语
本文针对高速铁路车辆横向二系半主动悬挂系统,提出了基于神经网络的自适应模糊控制。对于列车车辆轮轨关系的不确定性以及本身的强非线性特性和一定范围内的参数时变性,这种控制方法表现出很大的优势。针对模糊控制的控制规则难建立的缺点,运用神经网络对采集数据进行训练,得到适合列车在不同轨道谱平稳运行的模糊规则,使列车对轮轨激励的变化具有自适应能力。结果表明,采用基于神经网络的模糊控制器的半主动悬挂相对于被动悬挂来说,半主动悬挂能够更有效的衰减车体振动,表现出很强的自适应能力,大幅度提高了车辆的乘坐舒适度。
[1]姚建伟,嘎 尼.采用主动悬挂技术是改善机车横向动力学性能的有效途径之一[J].铁道机车车辆,2002,22(12):177-179.
[2]H.R.O’Neill,G.D.Wale.Semi-active Suspension Improves Rail Vehicle Ride[J].Co mputing &Contr ol Engineering Jour nal,Aug 1994,Vol.5:183-188.
[3]丁问司,卜继玲,刘友梅.我国高速列车横向半主动悬挂系统控制策略及控制方式[J].中国铁道科学,2002,4(23):1-7.
[4]Babuska R,Verbvruggen H.Neuro-fuzzy methods for nonlinear system identification [J].Annual Reviews in Control,2003,27(1):73-85.
[5]管继富,侯朝桢等.基于神经网络的半主动悬架自适应模糊控制[J].汽车工程.2003.(6):586-590.
[6]陈春俊,王开云.高速列车横向半主动悬挂系统建模研究及分析[J].振动与冲击,2006,25(4):151-154.
[7]顾秀萍,自适应神经模糊推理系统(ANFIS)及其仿真[J].火力与指挥控制,2010,35(2):48-49.
[8]Cheng-Tao Wu,Tsu-Tian Lee.Neural-Network-Based Optimal Fuzzy Control Design for Half-Car Active Suspension Systems[J].IEEE,2005:376-381.
[9]倪纯双,王悦明,浅析平稳性指标和舒适度指标[J].铁道机车车辆,2003,23(6):1-3.
[10]万里翔,许明恒.铁道车辆运行平稳性评价方法的研究[J].铁道机车车辆,2001,21(1):8-11.
