六足机器人HITCR-I的研制及步行实验*
2012-07-31赵杰张赫刘玉斌陈甫
赵杰 张赫 刘玉斌 陈甫
(哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江哈尔滨150080)
环境和任务的复杂性要求六足机器人具备灵活的运动能力和自主的适应能力,并且由于其结构具有多自由度串并联混合的特点,所以六足机器人的结构优化和控制体系的规划显得尤为重要.目前,比较典型的六足机器人,如美国凯斯西储大学仿生机器人实验室研制的“Robot”系列[1],通过改进机器人的运动形式和驱动方式来提高其运动能力;日本大阪大学工程科技研究所研制的“Asterisk”[2-3],通过增加一个腿部自由度来提高灵活度,但同时也增大了控制的负担;由德国卡尔斯鲁厄大学的FZI研究所研制的“Lauron”系列[4-5]以及 DLR 基于机械手手指研制的六足机器人“DLR-Crawler”[6],侧重于系统的集成,并没有对结构的优化进行具体研究.在控制体系结构方面,Brooks 和 Gabmann 等[7-8]提出了基于行为的分布式步行控制体系“包容体系结构”,该结构具有易于扩展任务的优点.Celaya等[9]基于“包容体系结构”的思想设计了LAURON系列机器人的步态控制器;也有学者设计了基于功能规划的步态控制器,例如基于神经网络的“Walknet”控制器[10]、基于腿部局部约束的步行控制器[11]以及竹节虫网络控制器[12],基于功能的步态控制器具有便于对任务进行模块化分解的优点,并成功应用于机器人Tarry II的控制系统中.
笔者研制了六足机器人HITCR-I,它具有新颖的机械结构、完备的电气系统、集成的传感系统以及合理的控制体系.设计了以复合四连杆为基本传动机构的腿部结构,使六足机器人HITCR-I的质量主要分布于躯体,在使腿部转动惯量较小的同时具有较大的运动刚度,并且把腿部基关节轴线与躯干的夹角和各肢节的长度比例作为自变量,把躯干的六维运动量作为因变量,构建了描述六足机器人整体灵活度的表达式来对结构进一步优化.通过分析基于“行为”和“功能”思想的控制体系结构的优点,将较高层级和较低层级任务分别基于“功能”和“行为”进行规划,设计了基于“功能-行为”控制体系结构的步态控制器,结合适应非结构化地形腿部运动轨迹的规划和基于局部规则的自由步态生成,使六足机器人复杂的步行任务得以实现,并且通过实验对机器人HITCR-I非结构化地形的运动性能进行验证.
1 六足机器人HITCR-I的系统组成
六足机器人HITCR-I的系统组成如图1所示,它具备分布式的控制体系硬件结构,由基于运动控制芯片(ARM)的控制板和基于可编程门阵列芯片(FPGA)的驱动板组成,并且通过以太网与上位机进行通信;在足端集成了三维力传感器,用于感知腿部三维空间的接触;躯干集成了两轴加速度计,用于感知躯干的位姿;腿部具有3个自由度,分别由3个舵机通过四连杆传动链机构驱动3个关节.
2 机器人结构设计
如图1所示,机器人HITCR-I的躯体外形以及各肢体基关节分布的基本构型为椭圆形,这种设计不仅可以减少腿间运动干涉,而且使步行稳定性得以提高.

图1 六足机器人HITCR-I的系统组成Fig.1 System composition of hexapod robot HITCR-I
2.1 基于四连杆机构的单腿结构设计
机器人的肢体设计采用均一化和模块化的设计理念,目的是使机器人具有良好的互换性.每条腿由3个肢节构成,分别为基节、股节和胫节;具有3个自由度,分别由基关节、基-股关节和股-胫关节构成(如图2所示).
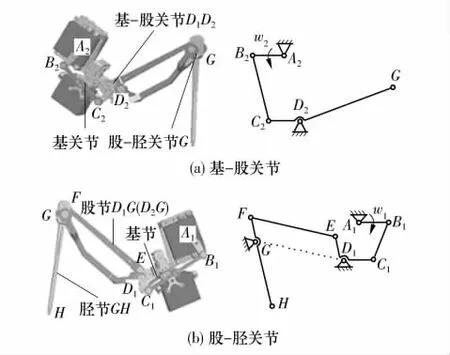
图2 基-股关节和股-胫关节的驱动原理Fig.2 Drive mechanism of coxa-femur joint and femur-tibia joint
为了减小腿部的转动惯量、增加机器人的刚度和运动的灵活度,采用了将占腿部比重较大的舵机集中设计在基关节的策略.因此,设计了传递效率高、刚度好的复合四连杆传动机构.基关节直接由电机驱动,基-股关节和股-胫关节由复合的四连杆机构传动,其驱动原理如图2所示.股节D2G及四连杆A2B2C2D2构成了一个传动链来驱动基-股关节D1D2;平行四连杆A1B1C1D1和D1EFG以及胫节GH组成了驱动股-胫关节的传动链,连杆C1D1与连杆D1E固定连接、胫节GH与连杆FG固定连接,驱动股-胫关节的电机转角输出等比例传递到基-股关节D1D2、再传递到股-胫关节,带动胫节运动.腿部传动链的整体结构如图3所示,该结构使腿部具有较大的活动空间,从而使机器人具备全方位的运动能力.
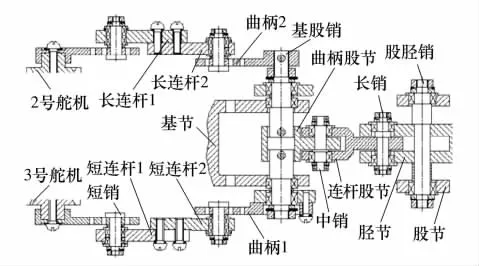
图3 股-胫关节和基-股关节传动链结构Fig.3 Drive chain mechanism of femur-tibia joint and coxafemur joint
2.2 HITCR-I腿部结构参数优化

式中,δ为目标优化函数,L 为腿的长度,Sx、Sy、Sz为躯体沿 x 轴、y 轴、z轴的位移区间,θx、θy、θz分别为躯体绕x轴、y轴、z轴的转角区间,ki为加权系数(0≤ki≤1,ki∈R,1≤i≤6,i∈Z).引入加权系数 ki的目的是通过改变其值来调节各因子对灵活度目标优化函数的影响程度.
2.2.2 约束因素
各参变量的约束因素有以下3方面:肢体的长度为272.5 mm;基关节的轴线与躯干平面的夹角0°≤φ≤90°;关节角的转动范围为基关节角∈[-45°,45°]、基 -股关节角∈[60°,180°]、股 -胫关节角∈[60°,180°].其中,肢体的长度主要根据机器人的功能需求决定,基关节的轴线与躯干平面的夹角由结构约束条件决定,关节角的转动范围由基本的运动需求和结构的限制因素确定.
2.2.3 优化计算
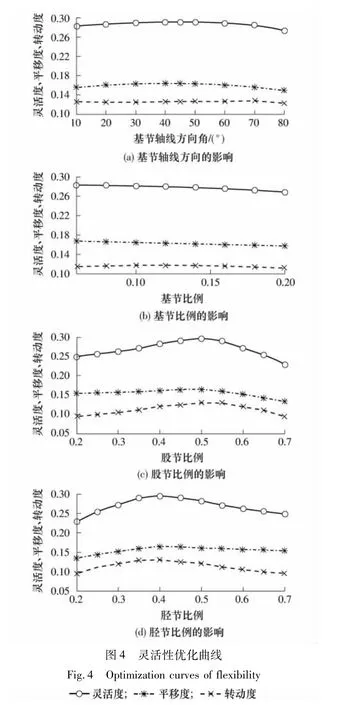
优化过程中,设定加权系数ki=1,综合考虑躯干的位移和转角6个参变量同时对灵活度目标函数的影响,利用ADAMS对六足机器人步行中的串并联混合结构进行运动学解算,得到多组数据,如图4所示.
计算结果显示,灵活度随着基节比例增大不断地减小,但由于电机尺寸和结构的限制,决定了机器人HITCR-I基节的最小长度为32.5 mm;当基节轴线与躯干平面夹角取值区间为[/6,/3]、股节比例在区间[0.40,0.55]、胫节比例在区间[0.30,0.45]时目标优化函数取得较优值,此时机器人具有较好的灵活度.由此,依照以上结论设计的六足机器人HITCR-I基节、股节和胫节长度分别为32.5、120和120mm,质量分别为 0.22、0.03 和 0.02 kg,躯干长260mm、宽 155 mm,质量为 0.62 kg,在实现小型化的同时具有较大的灵活度.
为了获得良好的运动灵活度,在机器人构型设计的基础上对腿部结构参数进行了优化.
2.2.1 目标函数的构建
构造的灵活度目标函数如式(1)所示,把各肢节的比例参数以及基关节的轴线方向作为参变量因数,以获得较大的躯干转向角和灵活度为目标,对结构尺度进行优化:
3 六足机器人HITCR-I的控制系统设计
为使机器人适应在非结构化环境中的步行,根据其结构参数及运动特点,人为将地形划分为重度崎岖和轻度崎岖两种情况,但在步行过程中机器人依靠足端力传感器信号来激发反射模式,无需对地形的类型进行辨识.轻度崎岖情况采用自由步态模式,通过自适应的步态平滑转换来适应地形的微小变化,从而快速前进;面对重度崎岖地形,则结合腿部反射策略来实现机器人稳定的步行.对机器人HITCR-I而言,障碍高度差约小于30 mm的地形为轻度崎岖,其能够翻越的重度崎岖地形最大障碍高度差约为40mm.
3.1 控制体系结构规划
六足机器人步行控制器的基本构架由两部分组成:“自由步态”[13]控制单元和“腿部反射”控制单元.“自由步态”控制单元实现腿间的协调,并且依照步行任务实现步态参数的自适应调整,当需要满足特殊地形的步行需求而触发反射模式时,则由“腿部反射”单元来执行步行控制.
由于六足机器人工作于非结构化地形,任务的多元性决定了其控制体系结构的复杂性,为满足其静态稳定、地形自适应、腿间协调等步行需求,设计了一种基于“功能-行为”控制体系结构的步态控制器.如图5所示为控制体系的基本结构.
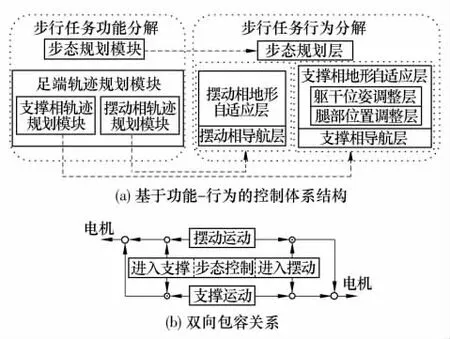
图5 控制体系结构Fig.5 Architecture of control system
步行控制器针对步行目标依照功能分解的思想分为腿部轨迹规划单元和自由步态生成单元.腿部轨迹规划单元除了满足基本的步行任务的需要,还实现适应非结构化地形的单腿轨迹生成,因此,基于行为分解的思想,进一步将其分解成“自适应层”和“导航层”.每一个控制单元都完成特定的任务:自由步态生成单元负责协调每一条腿在摆动控制模块和支撑控制模块之间切换,从而实现腿间的节律运动;腿部轨迹规划单元由摆动单元和支撑单元组成,并且两单元之间互相包容;摆动单元完成腿部的摆动并且实现落足点的选取;支撑单元实现机器人的前行以及姿态的调整.支撑单元的“自适应层”分别通过力控制的粗调和细调过程实现位姿调整和单腿的柔顺控制;摆动单元的“自适应层”实现落足点的选取以及激发腿部反射.支撑单元的“导航层”实现多支撑腿协调运动,按期望轨迹推进机器人行进;摆动单元的“导航层”实现腿部按规划的轨迹前摆.
3.2 自由步态生成
腿间相序的协调是六足机器人自由步态生成的核心问题,只有通过步态的平滑转换,实时地对腿间相序进行调整才能保证稳定的步行.针对自由步态生成问题提出了以下策略.
策略1:摆动腿通过在规定区间内延迟相邻腿的后转变点位置,来抑制其共同摆动.
策略2:到达后稳定点位置的支撑腿立即摆动,同时激励相邻的处于摆动相的腿进入支撑状态.
策略3:摆动腿进入支撑相的同时,通过在一定区间内将相邻腿的后极限点位置前置,激励相邻腿依次摆动.
基于以上一组局部规则,每条腿都描述为一个有限状态机系统模型(FSM),以“事件触发”的形式体现局部规则之间的激发和抑制关系,实时地调整腿间相序.
3.3 足端轨迹规划
图6为单腿一个步行周期轨迹的模型,设置了4个位置作为腿的状态转变的参考点,分别为前转换点(AEP)、后转换点(PEP)、前极限点(ASP)和后极限点(PSP),D'E'F'G'A'段描述了支撑相,A'B'M'C'D'段描述了摆动相.根据相对运动思想,以“基关节”转动中心为零点建立基本坐标系,在坐标系中建立连续的描述支撑相和摆动相的足端轨迹,这样不仅简化了模型,而且易于实现步态的控制.
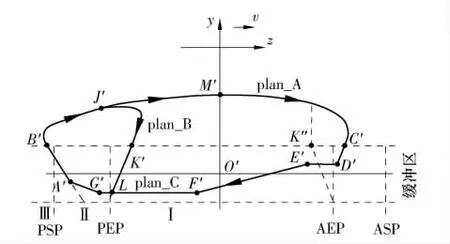
图6 腿部轨迹规划模型Fig.6 Trajectory planning model of leg
3.3.1 摆动相轨迹规划
摆动单元导航层的功能是:实现腿部前摆.缓冲区之上B'M'C'段(轨迹plan_A)与J'K'段(轨迹plan_B)曲线相结合完成了该腿部运动,其模型分别由多项式(2)、(3)来表示:


式中,splan_A、splan_B分别表示轨迹plan_A和plan_B中的足端位置,ca、cb为多项式系数,t为运动时间参变量.
为了满足机器人非结构化地形步行的需要,在足端轨迹的规划中设置了缓冲区,缓冲区中的轨迹曲线C'D'及K'L保证了摆动单元自适应层功能的实现,即落足点的选取以及激发腿部反射.
3.3.2 支撑相轨迹规划
支撑单元的“导航层”实现多支撑腿协调运动按期望轨迹推进机器人行进.公式(4)描述了“导航层”处于支撑相腿的足端轨迹D'A'段:

用sD'A'描述足端在轨迹D'A'中此刻的位置量,s'D'A'描述足端在轨迹D'A'中下一时刻的位置量,ΔsD'A'描述单位时间足端在轨迹D'A'中的增量,vD'A'y描述处于支撑相的腿运动速度y向的分量.
支撑单元的“自适应层”实现机器人行进中位姿的调整.位姿控制的目标是调整躯干的高度并且保持其与地面平行.支撑单元“自适应层”中的位姿控制D'A'段模型为

式中,h、h'分别为躯干几何中心的当前和下一时刻离地高度,Δh表示单位时间步长的躯干几何中心离地高度微增量,η、η'表示躯干的当前和下一时刻姿态角,Δη为单位时间步长的躯干姿态角微增量.
结合以上规划的足端轨迹与反射策略来实现复杂地形的机器人的腿部运动.
4 六足机器人HITCR-I仿真实验
为验证设计的步态控制器的有效性,模拟了在不规则路面上机器人的步行过程.采用正弦地形模拟崎岖地形,随机生成各足端的初始相位,并且给定机器人行进速度.其中,设定基本步长为0.05 m;前稳定位置与后稳定位置的间隔为0.08 m;行进速度为0.04m/s,机器人初始状态躯干距离地面0.06m,模拟的非结构化地形的最大高度为0.025m,为轻度崎岖地形,机器人能够在自由步态下快速行进.动态仿真截图如图7(a)所示,成功地实现了崎岖地形六足步行.得到步态节律如图7(b)所示,图中R1、R2、R3和L1、L2、L3表示六足机器人的左右各3条腿,通过对步态节律的分析可知,支撑腿的个数在整个崎岖地形行走过程中是变化的,但在任何时刻支撑腿的个数都不小于3,由零点力臂(ZMP)稳定判据[14]可知满足六足步行的首要稳定条件.此外,该控制器不仅克服了初始相位对腿间相序的干扰,而且很好地适应了变化的地形,腿间相序被很快平滑地调整到规则状态.由此可知,文中设计的控制器不仅能够有效地实现非结构化地形六足机器人的自由步行,而且具有很好的稳定性.
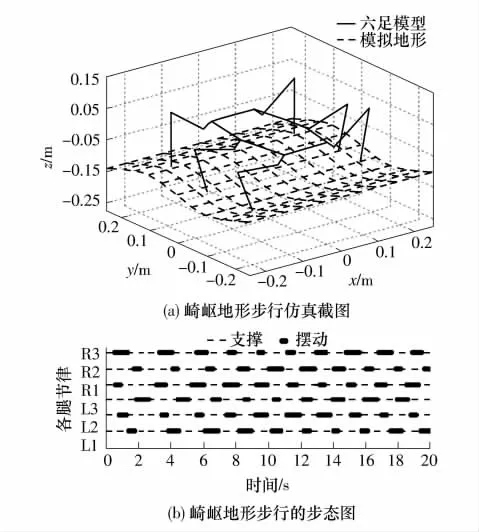
图7 崎岖地形步行仿真结果Fig.7 Simulation results of walking on irregular terrain
与传统的通过周期性加、减速过程来实现崎岖地形步行的控制方式(步行腿在前转变点处时机器人躯干的速度为零)相比,文中提出的方法可以使机器人在崎岖地形上以相对平缓的速度快速步行,从而克服了由于频繁的加、减速所导致的步行缓慢问题.如图8所示,虚线和实线分别为文中设计的控制器和传统控制器控制下六足机器人的行进距离随时间变化的曲线,可见在其他条件相同的情况下,文中设计的控制器可以使六足机器人具备更快的步行速度.
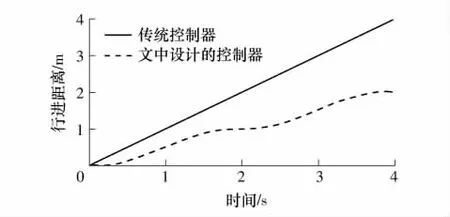
图8 两种控制方式的运动性能比较Fig.8 Comparison of motion performance of two control modes
5 非结构化地形步行实验
在人工非结构化地形环境中进行了机器人HITCR-I的步行实验,以验证其非结构化地形的步行性能.机器人初始位姿下躯干距离地面高度为65mm,障碍高度为37mm,地形为重度崎岖,障碍和躯干高度比为1.8.图9为该实验过程的视频截图.
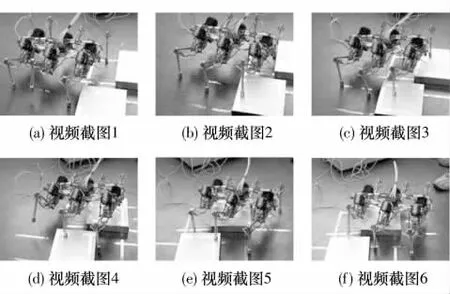
图9 非结构化地形六足机器人HITCR-I步行实验Fig.9 Experiment of hexapod robot HITCR-I walking on unstructured terrain
六足机器人HITCR-I在保持步行静态稳定的情况下,以0.03m/s(躯干长度为30 mm,行进速度与躯干长度比为0.1)的速度成功地穿越了非结构化的地形.步行过程中,当机器人在轻度崎岖路面行走时,工作在自由步态模式;遇到障碍后,立即激发反射模式,并且腿间相序由于障碍的存在而发生扰动,与此同时步态规划模块快速地对错乱的腿间相序进行调整,最终达到了稳定的步行节律.由此验证了步行控制器的有效性,以及六足机器人HITCR-I非结构化地形的步行能力.
6 结语
文中研制了一种满足非结构化地形步行需要的小型六足机器人HITCR-I.设计了基于复合四连杆传动机构的腿部结构,并且采用灵活度函数对结构参数进行了优化,使机器人本体具备良好的运动性能;设计了基于“功能-行为”的控制体系结构的步态控制器,实现了非结构化地形六足机器人有效且稳定的步行.最终通过实验验证了机器人非结构化地形下的步行能力.
为提高六足机器人非结构化环境的步行能力,下一步将进行六足机器人感知方面的研究,同时完善基于仿生学的机器人感知系统,并利用感知系统提高非结构化地形步态稳定性.
[1] Espenschied K S,Quinn R D,Chiel H J.Biologicallybased distributed control and local reflexes improve rough terrain locomotion in a hexapod robot[J].Robotics and Autonomous Systems,1996,18(6):59-64.
[2] Theeravithayangkura C,Takubo T,Mae Y,et al.Stair recognition with laser range scanning by limb mechanism robot“ASTERISK”[C]∥Proceedings of the IEEE International Conference on Robotics and Biomimetics.Bangkok:IEEE,2009:915-920.
[3] Fujii S,Inoue K,Takubo T,et al.Ladder climbing control for limb mechanism robot“ASTERISK”[C]∥Proceedings of the IEEE International Conference on Robotics and Automation.Pasadena:IEEE,2008:3052-3057.
[4] Gassmann B,Scholl K U,BernsK.Locomotionof LAURON Ⅲ in rough terrain[C]∥Proceedings of International Confe-rence on Advanced Intelligent Mechatronics.Como:IEEE,2001,2:959-964.
[5] Albiezl J,Berns K.Biological inspired walking—how much nature do we need[C]∥Proceedings of the International Conference on Climbing and Walking Robots.Madrid:IEEE,2004:357-364.
[6] Gorner M,Wimbock T,Baumann A,et al.The DLR-crawler:a testbed for actively compliant hexapod walking based on the fingers of DLR-hand Ⅱ [C]∥Proceedings of 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems.Acropolis:IEEE,2008:1525-1531.
[7] Brooks R A.A robust layered control system for a mobile robot[J].IEEE Journal of Robotics and Automation,1986,RA-2(1):14-23.
[8] Gabmann A,Zacharias F,Zollner J M,et al.Localization of walking robots.robotics and automation[C]∥Proceedings of ICRA 2005.Karlsruhe:IEEE,2005:1471-1476.
[9] Celaya E,Albarral J L.Implementation of a hierarchical walk controller for the LAURON III hexapod robot[C]∥Proceedings of the International Conference on Climbing and Walking Robots.Catania:IEEE,2003:409-416.
[10] Cruse H,Kindermann T,Schumm M.Walknet—a biologically inspired network to control six-legged walking[J].Neural Networks,1998,11(7/8):1435-1447.
[11] Fielding M R,Dunlop G R.Omnidirectional hexapod walking and efficient gaits using restrictedness[J].The International Journal of Robotics Research,2004,23(10/11):1105-1110.
[12] Quinn R D,Nelson G M,Bachmann R J.Parallel complementary strategies for implementing biological principles into mobile robots[J].The International Journal of Robotics Research,2003,22(3):169-186.
[13] Chen Fu,Zhao Jie,Zang Xi-zhe,et al.Free gait generation method for omnidirectional locomotion on abrupt terrain with multi-legged biomimetic robot[J].Journal of Harbin Institute of Technology,2011,18(2):101-106.
[14] 毕盛,闵华清,陈强,等.一种仿人机器人斜坡运动步态规划方法[J].华南理工大学学报:自然科学版,2010,38(11):148-154,160.
Bi Sheng,Min Hua-qing,Chen Qiang,et al.Simulation analysis of power of bootstrap tests in spatial econometric models[J].Journal of South China University of Technology:Nature Science Edition,2010,38(11):148-154,160.
