汽车电器系统结构的全分布式设计
2012-07-30张新丰杨殿阁连小珉
张新丰,杨殿阁,连小珉
(1.同济大学 汽车学院,上海201804;2.清华大学 汽车安全与节能国家重点实验室,北京100084)
20世纪初德国博世公司陆续发明了高压磁电机点火系统、起动机、直流发电机,随后电动雨刮器、前照灯等各种电器在汽车上开始广泛使用,20世纪50年代汽车上开始安装电子管收音机和晶体管收音机,1960年硅整流交流发电机开始在美国克莱斯勒汽车公司和日本日产汽车公司应用,不久便迅速推广到全世界,20世纪60年代发动机电子控制技术开始使用,80年代后期总线通信技术开始大量使用.据统计,到21世纪初国外汽车各种电气电子设备已经占汽车总成本的30%[1],汽车已经变成一个由许多控制器和电器构成的非常复杂的分布式控制系统.
1 汽车电子电器系统结构演变与创新
汽车电器指对汽车上的电路进行接通和分断、对电路参数进行变换以实现对电路或用电设备的控制、调节、切换、检测和保护等作用的电工装置、设备和元件.现代的汽车电器由于功能、用电量、外观造型等因素差异很大.为了便于对汽车电器进行统计,这里对独立的汽车电器进行定义.可通过线束与汽车电器系统实现电气分离的车载用电设备称为一个汽车电器.
随着汽车性能提升、电子技术的发展,汽车上电器的数量逐年增加,并出现了许多集成数字电路、能控制电器工作状态改变的控制电路.功能上完整、物理上独立并通过导线与汽车电器相连的成片数字逻辑电路称为控制器,控制器也是一种电器.
按上述定义,可对汽车上的电器和控制器进行统计,并定义分布指数i,i=c/d,式中:c为控制器数目;d为电器个数.比如一个独立的网关控制器,既是一个电器,同时也是一个控制器;具有网关功能1个车身控制模块(body control module,BCM)也只能算做1个电器和1个控制器;普通的汽车组合前灯可以算1个电器,但不是控制器.分布指数i为0~1之间的正实数,0表示没有控制器,系统为点对点连接系统结构,1表示全分布式电器系统结构,所有电器中均含有控制器.i能综合反映汽车电器系统中控制器相对于电器的控制水平和控制器的分布程度:分布指数越小,表明控制器所占比重越少,分布设计程度不高,反之则系统结构分布程度高.
汽车电子电器系统结构不断演化与发展创新,其典型的结构有点对点连接系统、集中式控制系统和分布式控制系统等,如图1所示.

图1 汽车电器系统结构Fig.1 Automoitve electrical system architecture
图1 a~1c所示的系统结构,i分别为0,0.05和0.36.最早的汽车电器导线互相连接,直到20世纪80年代初期所有汽车均使用这样的电器系统结构,如图1a所示.80年代中后期开始,基于单片机的电子控制技术大量使用,中央集中式控制器开始应用[2],90年代后期车载网络技术大量应用,分布式控制系统开始出现,汽车电器系统分布指数大为提高.比如飞思卡尔、恩智浦和沃尔沃都提出自己的汽车电器系统结构[3],斯堪尼亚卡车[6]、大陆汽车、沃尔沃[7]等都采用了多总线结构,其分布程度及发展趋势如图2所示.
由图2的发展趋势可以看出,如果采用分布指数来指示,则从20世纪90到现在,其分布指数从不足0.10逐步增加到0.20,表明汽车电子电器系统的分布程度越来越高,张新丰提出的智能电器系统[8]是一种近似全分布式的控制系统.

图2 汽车电器系统分布控制发展现状Fig.2 Development trend of automotive distributed system
2 全分布式汽车电器系统构架
全分布式结构中所有电器均为智能电器,系统连接由2个独立的部分组成,即数字信号网络和供电网络,其结构如图3所示.图中,δi,j为局域电器;di为骨干电器,γj为第j个网关;Lj为第j个局域网;为第j个复合智能电器;C为骨干网络;E为电网络;L为局域网络集;CCCU为中央协调器(central coordination control unit).如图3所示,数字信号网络具有分层结构,是由C和L构成,并且所有车载电器都具有数字化接口,并通过C或L网络连接起来.骨干网是整车范围内数字通信的唯一网络,目前的主流技术为高速CAN总线;而局域网主要用于分担整车网络负载,并以位置空间或功能需求进行电器划分.

图3 全分布式汽车电器系统构架Fig.3 Completely distributed electrical system architecture
全分布式汽车电器系统中引入电源网络E,电源网由多个独立的 “电源通道”构成,并且:①为所连接的电器提供电源并且在汽车停机状态下控制静态电源消耗;②监控蓄电池状态,以减小蓄电池因长期电力消耗导致亏电的可能性;③检测通道上的电流,当电流超过合理范围时关闭通道以达到整车安全用电目的.
与骨干网络C相连的中央协调器用于执行整车的控制逻辑并协调整车电器正常工作.电器通过数字接口与中央协调器进行指令和信息的交换.在全分布式汽车电器系统中,对整车电器的控制指令都从中央协调器中发出,如图3中指令流所示.指令流进入骨干电器di或通过网关γi进入局域电器δi,j,同时从电器中发出的状态信息都在数字信号网络(C及L)上实现共享.驾驶员的输入控制操作被诸如组合开关、控制面板、车载电脑等电器接收,并通过数字信号网传递到中央协调器,中央协调器检查相关电器的状态,并根据控制逻辑发出控制指令,然后由相应的执行电器执行指令.由于中央协调器,系统中的电器只保留最基本的控制及诊断功能,与其他电器建立了间接的逻辑关系,实现了相对独立性,提高了系统的可扩展性.
与现有的分布式系统相比,全分布式系统结构具有如下优势:①数字化全分布式的系统对每个电器进行单独控制和诊断,并在车载电脑、控制面板和操作按钮的帮助下很容易实现多模式操控;②具有很大的可配置、可维护与可升级性,标准化的电气接口能够在不改变上述系统结构和线束的前提下衍生出多个汽车型号的配置;③由于全分布式系统中电器的相对独立性,全分布式汽车电器系统便于对故障电器隔离,提高了系统的可靠性.
3 全分布式系统数学描述与设计
全分布式系统结构通过数字信号网络和电源网络实现信息与能源的传递并使用不变线束实现系统连接.
3.1 分布式数字信号网络
为达到减小网络复杂度和网负载的目的,整车电器被分为2类,即骨干电器和局域电器,并被分配到骨干网和局域网.骨干电器与局域电器的分类原则如下:①有较高时效性信息交换要求;②有大量信息交换的要求;③在原车电器系统中有较高安全性相关要求.
局域电器根据实际空间位置、功能需求和布线约束组成局域网络.局域网组合需要考虑以下几点:①实现局域网所用技术对网络节点限制;②权衡增加节点和新建网络所需的费用;③潜在的扩展性(系统配置升级)要求.
数字信号网络由骨干网C和若干局域网Li组成式中:bC为骨干网线束,比如CAN总线等;D为骨干电器集,包括2类:单型骨干电器和复合型骨干电器式中:di为单型骨干电器,i=1,2,…,N;N和M分别为单型骨干电器数和复合型骨干电器数.局域网络集为局域网络数.Lj=式中:bj为局域网线束,比如LIN总线等;Δj为局域电器集;m(j)为局域电器集Δj中电器数.
骨干网C和局域网Lj通过网关γj相连,网关的作用是过滤并转发与之相连2个网络间的消息.网关γj和局域网Lj构成式(3)中所述的复合型智能电器=(Lj,γj),j=1,2,…M.
3.2 分布式电源网络
全分布式控制电器系统中电源需求分为2个部分:低压弱电电流消耗和高压强电电流消耗.低压弱电流消耗指电器内部控制器和数字信号网络等电子电路的用电,电压一般可采用12V或5V甚至更低;高压强电电流消耗指电器负载部分的消耗(新能源汽车上的动力驱动用电源暂时不在本系统考虑范围之内),其电压有12V(轿车)或24V(客车),甚至有向42V系统推广的趋势[9].低压弱电流需要1个不受电器系统工作干扰的稳定电源,并有很小的功率消耗;高压大电流则对电源电压质量要求不敏感,并有很大的功率消耗.
全分布式汽车电器系统中的电源网络E包括弱电电源Ef和强电电源Ep两个部分,E=(Ef,Ep).弱电电源用于给电器中的控制器、总线等供电,包括3个电位线.Ef=(es,et,ed),式中:es为常通电源,用于驻车后不间断工作的电器,比如钥匙进入系统、时钟及中央协调器等;et为可控电源;ed为前述电源地线.强电电源用于给电器功率消耗部分供电,并且监控用电,保持发电机、蓄电池的电量平衡.强电电源Ep包括2个部分式中:Q为电源通道集;G为接地(也称车身搭铁)点集.电源网络E可采用智能电源管理系统,该系统也是由1个网关和若干局域电器组成.其中1个局域电器管理1个电源通道q,利用电流检测器和继电器及电流保护电路等方法实现电源开关控制、电流检测和过流保护等功能[10].
3.3 不变线束系统
根据有人统计,21世纪初一辆高档汽车拥有多达400个的接插件和多达3 000个的接线端子[11],线束电缆总长度长达1 500~2 000m[11].线束制作的材料和劳动成本占零部件费用相当的比例.全分布式汽车电器系统的一个重要的特征就是简化汽车线束.全分布式汽车电器系统的线束结构为H=(HC,HL,HP),式中:HC,HL,HP分别为骨干网线束、局域网线束和电力线束.为简化安装,骨干网线束和局域网线束在物理上都包含3个部分,如图4所示的干线、支线及延长线.

图4 骨干网线束和局域网线束Fig.4 Backbone network harness and local network harness
骨干网线束HC定义了标准化的物理接插件及与插件端子对应的导线集WC,WC=(cH,cL,es,et,ed,qc,gc),式中:cH和cL为CAN 信号双绞线;es,et,ed为弱电电源线;qc和gc为强电电源.局域网线束HL定义了标准化的物理接插件及导线集Wj,Wj=(et,ed,nj,qj,gj).
电力线束用于给骨干网线束和局域网线束供电,其包括干线和诸多分支,如图5所示.电力线束只包括由单线构成的电源通道,其导线集WP={qj|j=1,2,…,Q}.
利用不变线束进行整车的线束三维布置则变得相当简单,比如根据电器的排列可采用鱼骨型或门型布局[12],二维工程图纸则更加简化.

图5 电力线束结构Fig.5 Power network harness structure
4 基于关联子系统的整车协调控制
中央协调器最关键的任务是根据数字信号网上的信息产生正确的控制指令,因此关键是整车协调控制算法.利用关联子系统的方法来分析全电子汽车系统中电器的协调控制逻辑关系.
关联子系统Ψ=(xe,DX,DY,ce,Λe),DX,DY⊂D,式中:xe为协调控制指令;DX为受指令xe控制的电器集;DY为协调控制用信息来源电器集;ce为协调信息集;Λe为协调函数.
中央协调器最重要的问题是设计协调函数Λe.协调函数Λe定义为从协调信息集ce(含从Ψ(x)个信号)到控制指令xe的映射:Λe:xe=Λ(ci),ci∈ce,i=1,2,…,Ψ(x).为了便于使用代数工具来计算Λe的值,定义,式中:c为一个可以使用与(∧)、或(∨)、非(⇁)等算子的逻辑表达式;T与F表示真假值;m,n为数值.协调函数的设计原则为:①行驶安全优先设计;②驾驶员意图优先设计;③最少电器状态改变.
由于中央协调器是整车电器系统最关键的部件,除了保证其自身的可靠性外,还可采用对其进行冗余备份及监控的方法,提高全分布式汽车电器系统的可靠性[13].
5 全分布式电器系统样车验证与分析
对一辆国产大型客车的电器系统进行了改造设计,以验证全分布式汽车电器系统的可行性.实际设计过程中,对发动机管理系统、防抱死系统等涉及到汽车动力及安全相关的电器子系统仍保留原来的控制器,并作为骨干电器添加网络通信接口,所有车身电器实现了全分布式控制.
5.1 系统设计
对骨干网和局域网数字信号网络分别采用CAN总线和LIN总线技术加以实现.由于全分布式汽车电器系统其网络拓扑结构、供电方式、线束布置及协调控制逻辑等都已被大幅简化,因此实现该系统主要的工作量在于电器的智能化.如图6a所示,通过分别对每个电器设计控制器达到电器的智能化目的.
第1步先根据3.1节所述电器分类及组网原则将原车所有电器分为骨干电器和局域电器,其中单型骨干电器如表1所列,共14个,其余72个局域电器构成7个局域网,即7个复合型骨干电器.
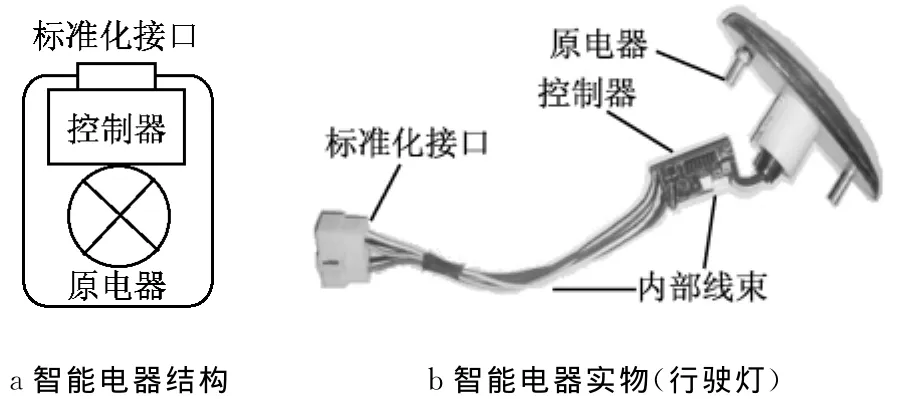
图6 智能电器结构及样机Fig.6 Smart device structure in automotive
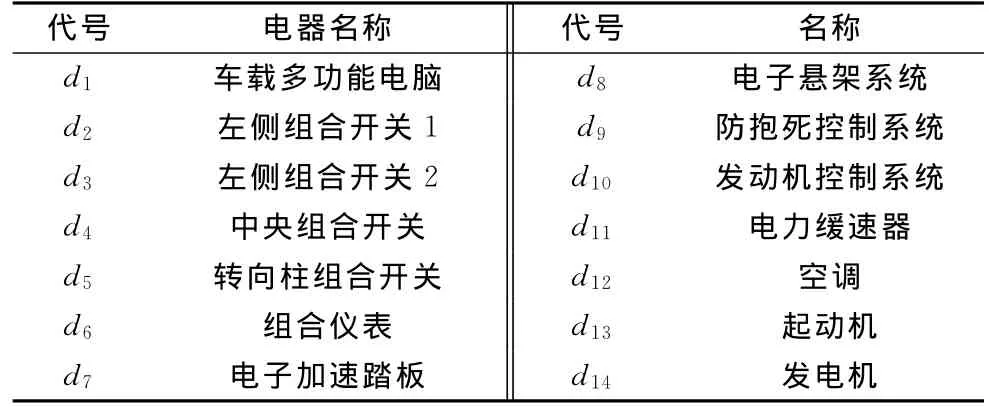
表1 单型骨干电器Tab.1 Single backbone devices
第2步将所有原车电器中所含的电器件负载按电气特性进行分类和整理,得到其智能化控制所需控制指令、状态信号以及硬件驱动电路,得到如表2所示10类基本电器件.
表2中的基本电器件基本上能涵盖现有车载电器所有的负载类型,即通过上述基本电器件组合可得到所有原车电器.也就是说,每个电器可能只包含上述1个基本电器件(比如行驶灯),或多个基本电器件(比如前组合灯).其中具有控制指令x的基本电器件可由电气动作,具有状态信号y的电器件则定义该基本电器件输出的状态.

表2 基本电器件分类Tab.2 Classification for basic devices
第3步对所有电器进行智能化设计,使得电器能进行数字化控制,并具有标准化接口.智能化设计可采用模块化设计方法,针对上述基本电器件设计电路模块,然后进行模块组合,开发出电器智能化所需控制器.智能电器原型样机如图6b所示.其中出现的内部线束只有在原理样机中出现,可通过将电器与控制器的集成化设计最终退化为印制电路(甚至芯片)内部的导线.
最后进行整车协调控制设计并完成全分布式汽车电器系统的集成,全分布式汽车电器系统的整车原理如图7所示.
在图7所示基于全分布式汽车电器系统的客车整车电器系统原理图中共有单型骨干电器14个,局域电器72个,组成7个局域网,其中L1~L6分布在车前、车中前、车中中、车中后、车尾及车顶,智能电源局域网络LPSN下有8个局域电器,7个用于控制电源通道,1个用于监测蓄电池状态.
5.2 结果分析
原车电器系统经过全分布式汽车电器系统改造后的大型客车在保持原有功能的基础上增加了如电器自我诊断、多模式操作等新的功能,在不同的温度、气候及道路环境下对所有电器进行了测试,证明系统是可靠的.全分布式汽车电器系统所用不变线束与原车线束相比导线和接插件定义具有不变特性,与电器种类和数量无关,因此大为简化,其结果如表3所述.

表3 不变线束与原线束对比Tab.3 Comparison between invariant and traditional harness
全分布式电器系统中控制器数量大幅增加而线束大幅简化,在提高整车性能的前提下,对于全分布式设计的附加总成分析如下:
(1)电器智能化所需控制器可以标准化,并可采用专用芯片,成本会大幅降低,计算机和内存价格走势能说明这个问题,如图8所示.

图8 全分布式设计附加成本主要因素价格变化Fig.8 Price of key factor for the additional cost of completely distributed system
(2)汽车线束生产是目前汽车工业中自动化程度最低的环节,因此线束成本主要包括铜材和人工成本,铜材成本可参考伦敦金属交易所公布的国际铜价,人工成本可参考《中国统计年鉴》中按细行业分城镇单位就业人员平均劳动报酬中的交通运输设备制造业职工年收入,其年均变化规律如图8所示.线束简化的节约必然会平衡由于控制器增加带来的开销.从长时间看不仅能平衡控制器增加的成本,且经济性会越发凸显.
6 结论与展望
全分布式结构利用独立的数字信号网络与独立的电源网络实现整车智能电器的数字化控制,并能提供稳定的弱电电源和安全的强电电源,基于电器的标准化接口实现了汽车的不变线束,不变线束节省了导线,简化了布线设计,使得线束简化.系统利用中央协调器实现了整车协调控制,实现了智能电器的独立控制.
全分布式汽车电器系统目前主要的问题及未来的工作:① 实现全分布式设计的附加成本主要集中在电器智能化所需控制器上,至少当控制器成本增加与线束成本减少维持平衡时,系统才能推广;②全分布式系统结构是一种理想体系结构,可将上述全分布式系统结构作为基准方案,对现有电器系统结构以可靠性、可配置性、标准化、经济性等为设计目标进行优化.
[1]John G Kassakian.Automotive electrical systems:the power electronics market of the future[J].Applied Power Electronics Conference and Exposition,2000,1:3.
[2]Leen G,Heffernan D,Dunne A.digital networks in the automotive vehicle[J].Computing & Control Engineering Journal,1999,10(6):257.
[3]Kang,X.Body electronics solutions[C]//China International Automotive Electronics and Technology Seminar.Beijing:AES China,2005:13-17.
[4]Zhou L.CAN bus application solutions[EB/OL].[2010-04-05].http://www.zlgmcu.com.
[5]Froeberg J,Sandstroem K, Norstroem C, et al.A comparative case study of distributed network architectures for different automotive applications[R].IEEE Press and CRC Press,2004.
[6]Johansson K H,Toerngren M,NielsenL.Vehicle applications of controller area network[R].Boston:Birkhauser Boston,Inc,2005.
[7]Volvo.Body building instructions [EB/OL].[2009-02-01].http://www.volvo.com/bus/global/en-gb/products /bodybuilding+instructions.
[8]张新丰.汽车智能电器系统[D].北京:清华大学,2009.ZHANG Xinfeng.Automotive intelligent electrical and electronic system[D].Beijing:Tsinghua University,2009.
[9]J G Kassakian,J M Miller,N Traub.Automotive electronics power up[J].IEEE Spectrum,2005,37(5):34.
[10]张新丰,杨殿阁,陆良,等.车载电源管理系统设计[J].电工技术学报,2009,24(5):189.ZHANG Xinfeng,YANG Diange,LU Liang,et al.Automotive electrical power management system design[J].Transaction of China Electrotechnical,2009,24(5):189.
[11]Leen G,Heffernan D,Dunne A.Digital networks in the automotive vehicle[J].Computing & Control Engineering Journal,10(6):257.
[12]张新丰,薛雯,陆良,等.汽车电器不变线束连接系统[J].清华大学学报:自然科学版,2009,49(2):281.ZHANG Xinfeng,XUE Wen,LU Liang,et al.Invariant wiring harness for vehicle electrical device connection[J].Journal of Tsinghua University:Science &Technology,2009,49(2):281.
[13]Gu Z M,Yang D G,Zhang X F,et al.Distributed vehicle body electric/electronic system architecture with central coordination control[J].International Journal of Automotive Engineering,2010,224(2):189.
