基于解耦设计的积分分离控制器在协调控制系统中的应用
2012-07-28东朝阳张明智
郑 清,东朝阳,张明智
(华北电力大学电站设备状态监测与控制教育部重点实验室,河北 保定 071003)
近年来,随着电力工业自动化水平的提高,电网综合自动化对单元机组协调控制系统的设计和控制品质提出了越来越高的要求。但是,由于单元机组协调控制系统是一种多变量控制系统,受控过程是一个多输入多输出的过程,在输入和输出之间存在着交叉的关联和耦合。协调控制系统设计的理想目标就是实现多变量的完全解耦[1-2]。本文对协调控制系统进行了解耦且对积分分离控制器进行了仿真试验,经过与常规PID控制进行比较,积分分离控制器可应用于机侧控制器。
1 机组协调控制对象的动态特性分析
汽包锅炉单元机组可简化为一个具有双输入和双输出的被控对象,机组的输出功率N和机前压力Pt只为被控量;主汽门调节阀开度量μ和燃料量B为控制量[3-4]。这种合理简化的前提是:
(1)送风量和燃料量相适应,保持燃烧稳定。
(2)引风量与送风量相适应,保持炉膛压力。
(3)给水量通过保持汽包水位进行控制,使给水流量与蒸汽流量相平衡。
(4)主蒸汽温度相对独立。
在此基础上,单元机组协调控制系统的对象原理图如图1所示。

图1 协调控制系统对象简化模型
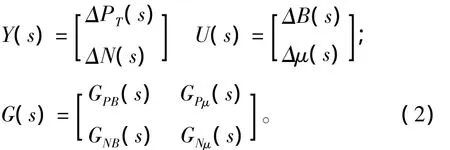
在此基本假设条件下,单元机组受控过程动态特性可由线性常系数多变量传递函数描述:

式中:Y(s)、U(s)分别为被控量和控制量矢量;G(s)是系统的传递函数矩阵。
对于图1所示的单元机组受控对象,有:
求取G(s)各元素的传递函数表达式要建立单元机组动态特性数学模型,本文采用前人己经建立的成熟数学模型[5]:
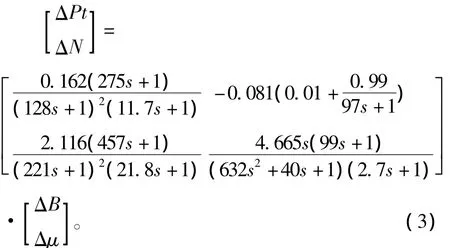
使用的量纲为:ΔPt,MPa;ΔN,MW;ΔB,t/h;Δμ,%。
2 机炉动态特性的基本特征
构成单元机组受控对象的设备是锅炉和汽轮发电机组两大部分。协调控制系统设计时,主要针对一个双输入、双输出的受控对象,其动态特性方面有以下基本特征:
(1)在锅炉控制量ΔB作用下,输出被控量ΔPT和ΔN的响应是一个慢速的惯性过程;而在汽轮机控制量Δμ的作用下,输出被控量ΔPT和ΔN的响应则是一个快速的过程。
(2)由于锅炉的热惯性比汽轮发电机组的惯性大得多,使得输出被控量ΔPT和ΔN对于ΔB的响应速度十分接近,表现为传递函数矩阵中GPB(s)与GNB(s)之间十分相近的特性。
(3)利用汽轮机调节门开度Δμ作为控制量,可以快速的改变机组的被控量ΔPT和ΔN。其实质是利用了机组内部的蓄热,主要是锅炉内部的蓄热。机组容量越大,相对地这种蓄热能力越小。因而,利用汽机调节门控制机组输出功率的方法只能是一种有限的、暂态的策略。这样限制体现在对机前压力ΔPT变压范围与变化速度的限制。因为PT直接反映了锅炉能量输出与汽轮机功率之间的平衡关系。
3 协调控制系统控制对象的解耦设计
解耦设计是多变量系统控制中的有效手段,其实质是针对多变量受控对象各输入与输出之间存在关联与耦合的基本特征,设计补偿网络来消除或消弱其间的关联与耦合,把多变量问题转化为多个单变量控制问题来处理。在工程实际中,常用静态解耦、单向解耦和近似解耦三种较为实用的解耦网络简化结构[6]。
本文采用前馈补偿解耦,该方法原理和结构简单,易于实现。解耦网络结构如图2所示。

图2 前馈补偿结构
由图2可得两输出分别为(不考虑反馈闭环):
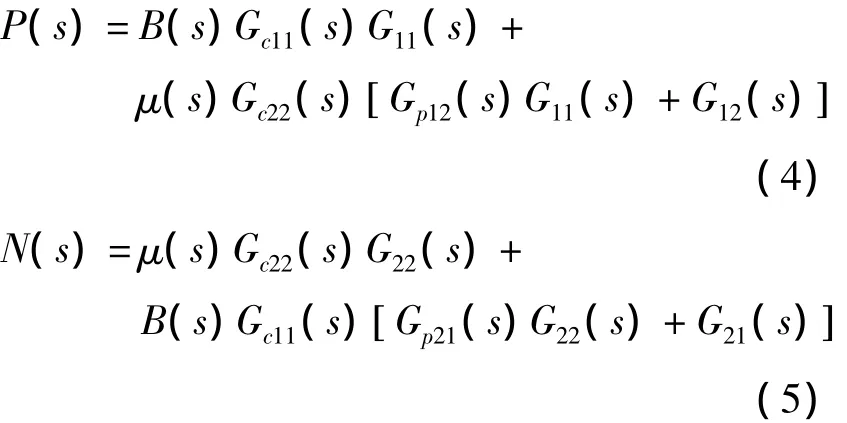
要实现系统的解耦,由式(4)和式(5)可得两个前馈补偿器分别为:

由前面提到的数学模型式(3)将得到:

四个式子代入公式(6)和(7)即可求出Gp12(s)和Gp21(s)从而实现系统的完全解耦。解耦后的系统等效为两个控制回路:汽机侧控制回路和锅炉侧控制回路,针对汽机侧调节速度快的特点,将积分分离PID控制器应用于汽机侧控制器。
4 积分分离控制器在汽机侧控制器中的应用及仿真
普通PID控制中引入积分环节的目的,主要是为了消除静差,提高控制精度。但在过程的启动、结束或大幅度增减设定时,短时间内系统输出有很大的偏差,会造成PID运算的积分积累,致使控制量超过执行机构可能允许的最大动作范围对应的极限控制量,引起系统较大的超调,甚至引起系统较大的振荡,这在生产过程中是绝对不允许的。引进积分分离PID控制算法,既保持了积分作用,又减小了超调量,使得控制性能有了较大的改善。
积分分离控制的基本思路是:当被控量与设定值偏差较大时,取消积分作用,以免由于积分作用使系统稳定性降低,超调量增大;当被控量接近给定值时,引入积分控制,以便消除静差,提高控制精度。
取数学模型式(3)做阀门开度阶跃扰动的内扰仿真试验:
(1)汽机侧积分分离PID的参数kp=2,ki=0.0625,kd=0.01。
(2)汽机侧传统的PID控制器的参数:kp=1.2;Ti=180;Td=0.1。
静态工况下,仿真时间为700 s时在汽机侧加入1%的阀门扰动量,其仿真结果如图3所示。

图3 汽机阀门开度扰动下功率响应曲线
图中实线是使用积分分离控制算法得到的输出,虚线是常规PID控制的输出。可以看出,积分分离控制能明显的减小超调量和振荡次数,改善控制品质。
5 结束语
文中采用的是以炉跟机为基础的协调控制系统。对于以炉跟机为基础的系统来说,汽机调节器本身就具有很强的消除汽机侧扰动的能力。机前压力偏差信号引入汽机调节器可以补偿来自锅炉侧扰动对汽机调节器的影响,使锅炉输入能量能够快速与外界负荷要求相适应。锅炉侧扰动由锅炉控制器消除,不会对输出功率产生严重影响。仿真结果表明,将积分分离PID控制算法应用于汽机侧控制器使得控制性能有较大的改善。
[1]王东风,韩璞.单元机组协调控制系统的发展和现状[J].中国电力,2002,35(17).
[2]曾德良,刘吉臻.单元机组智能协调控制系统的发展和应用[J].电力情报,1998(3).
[3]张玉译.热工自动控制系统[M].北京:水利电力出版社,1985.
[4]李遵基.热工自动控制系统[M].华北电力大学,1999.
[5]刘吉臻.协调控制与给水全程控制[M].北京:水利电力出版社,1995.
[6]刘晨辉.多变量过程控制解耦理论[M].北京:水利电力出版社,1984.
[7]时杉杉,姜雪松,傅灵玲.地源热泵空调控制系统的变频改造[J].森林工程,2008,24(6):25 -28.