混合电动车能量回馈控制系统设计
2012-07-28高善铭
高善铭
(哈尔滨工业资产经营有限责任公司 哈尔滨 150001)
0 引言
HEV大巴采用燃油和电力两种驱动方式,然而,如何提高行驶能量效率,延长了续驶里程,是急需解决的一个关键问题。其中能量回馈是解决该问题的主要措施,能量回馈包括制动能量回馈与滑行能量回馈两种[1]。CAN通信在电动车中应用时,使用两根信号线就能实现对车速、发动机转速、加速度、刹车踏板、油门踏板、档位信号的共享和各个控制系统之间的通信[2]。该通信方式的设计使传输线束简洁可靠、节约铜材、维护方便。
文中重点研究基于CAN总线的混合制动能量回馈系统,将CAN总线引入到电动车的能量回馈系统当中,利用电机与逆变器的工作特点实现具有ABS机械制动和电机回馈制动相结合的能量回馈模式。要实现安全、高效的回馈减速制动,还要与传统的摩擦制动配合工作中,考虑大巴运行状态、刹车踏板位置、电池SOC状态、电池充电功率、电机发电能力等因素,才能节约电动车的电池能量[3],减少制动时的机械磨损。
1 整车系统的结构
随着安全环保节能要求的不断提高,以及车内设施的逐渐增多,电控系统原有的点对点控制方式将造成庞大的布线系统,加剧了粗大的线束与汽车有限空间之间的矛盾。同时导线的抗干扰性较差,特别是在大巴启动、刹车、高频电源充电的高噪声环境中传输数据时,会出现信号传输不稳定,甚至错误。
本系统由八个节点构成,包括:动力总成控制器、电机控制器、充电机控制系统、AMT、ABS、EPS、电池管理系统、组合仪表系统。总线通讯速率为250 kb/S,系统框图和节点SA地址如图1所示。
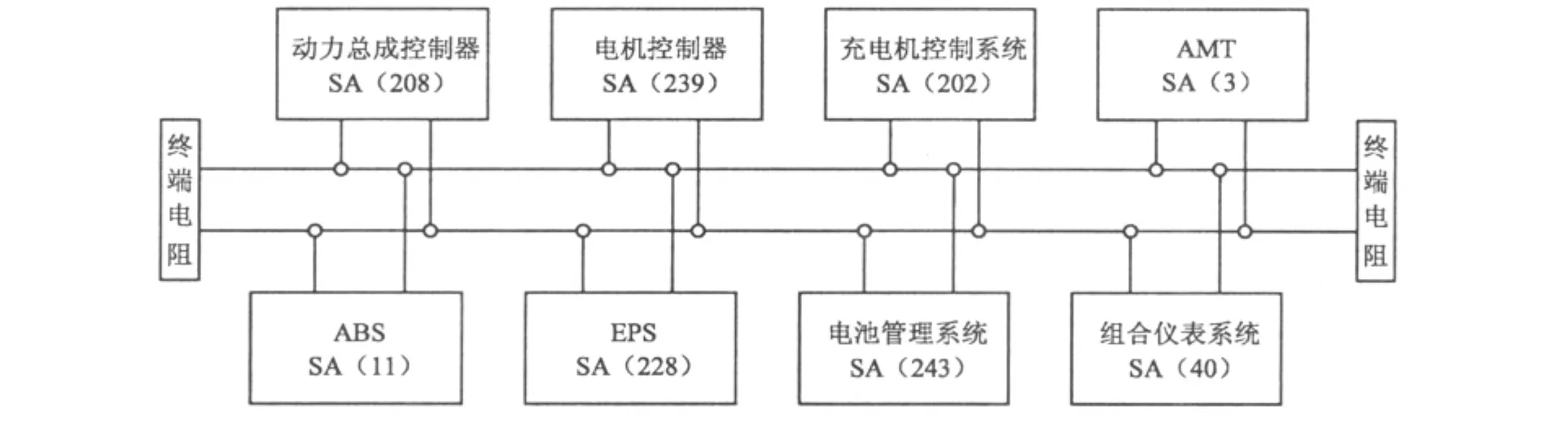
图1 系统结构框图
2 制动能量回馈系统
机械制动是由刹车气压系统来驱动闸片液,以摩擦制动片产生制动力矩。ABS制动是当车辆的减速度达到了ABS节点激活的门限值的时候,ABS系统被激活并独立调节车辆的刹车过程。电机的回馈制动分为高速制动和低速制动。高速制动是大巴在下坡时电机转速超过理想空载转速,电机控制节点控制电机发电;低速制动是制动时将大巴的机械能转化为电能,产生制动力矩,并将能量回馈到动力电池组中。
在车辆制动能量回馈工况中,保持制动踏板的感觉及驾驶柔顺性是首先要考虑的,因此根据运行状况分为电机能量回馈和后轮机械制动、电机能量回馈和前后轮同时机械制动、ABS防抱死制动。
系统采用锂动力电池,此电池具有高倍率充电特性,可以提高回馈制动的比例。电动车广泛应用于城市公交车,在公交路线中有频繁的制动动作,但只有很小部分需要很大制动力矩。当动力总成节点检测到刹车信号时,通过CAN网络与电机控制节点电池管理系统节点共享信息,来确定能量回馈制动和后轮机械制动力矩的比例;动力总成节点检测车速,如果未能满足要求,前轮的机械制动启动;车速较高时,前后轮同时制动可能出现抱死,车辆打滑,大巴不易控制,这时通过ABS 节点完成回馈制动[4-5]。
3 系统硬件设计
系统中电机转速、车速、加速度、刹车踏板位置由电机控制节点和动力总成节点检测,并将运行信息通过CAN总线实现共享[6]。
3.1 相关信号检测设计
电机转速由脉冲编码器测量。电机每转一周产生1 024个相位差90°的A,B路方波信号,经74HC14施密特触发器整形后接到TMS320LF2407的QEP单元,确定转速和旋转方向。用MEMS加速度计测量加速度,并通过I2C方式送入动力总成节点μPDF70F3239控制器中。
刹车信号是由安装在刹车总泵中的阀门开度传感器检测。阀门开度传感器与踏板位置有线性关系,且送出电压信号,送入到动力总成节点μPDF70F3239控制器12位A/D转换器。
3.2 CAN 网络设计
本系统的核心是CAN网络设计。以电机控制器节点为例,详细介绍网络接口的硬件设计。
在电机控制器节点中,选用TI公司推出的带有片上CAN口的TMS320LF2407,其核心采用哈佛结构,具有专门的硬件乘法器,利用其可编程带死区PWM实现电机的矢量控制。选用低功耗SN65HVD230为控制器和物理总线之间的驱动芯片,提高在过压、高温、高共膜等恶劣环境中总线的差动发送能力和CAN控制器的差动接收能力。
增强电机控制器的抗干扰能力,TMS320LF2407通过高速光耦HCPL600与SN65HVD230相连,实现了总线上各CAN节点之间的电气隔离,光耦两侧独立供电,实现完全隔离。
原理图如图2。SN65HVD230的 CANH和CANL引脚各自通过一个5Ω的电阻与CAN总线相连,起到限流的作用,免受过流的冲击。CANH和CANL之间与地并联二个30PF的小电容,起到滤除总线上高频干扰和一定电磁辐射的能力。CANH和CANL与地之间分别反接一个保护二极管,当CAN总线上有较高的复电压时能够起到一 定的过压保护的作用。
3.3 动力总成节点设计
系统的中心处理器采用汽车级别32位控制器μPDF70F3239,带有4路CAN口,是控制系统的枢纽—网关。通过CAN通信和直通方式接收来自不同ECU的信号并按照预设的控制策略发送控制信号,以完成HEV大巴不同工作状态的切换和切换过程的协调控制。
系统的ABS控制器采用了带有CAN接口的32位控制器TMS320F28016。负责驱动制动分泵,实施机械制动和ABS制动并能完成自身的故障诊断。

图3 动力总成网络拓扑图
4 能量制动回馈系统程序架构设计
文中系统是一个由多个控制器组成的大系统,为增强程序的可移植性和多个嵌入式工程师协同工作,采取模 块结构。整个架构包括主程序、模拟量采样子程序、数字量采样子程序、数据发送子程序、数据接受子程序、节点自检程序、中断子程序等模块[7]。
车速信号由电机转速信号推到得到。电机控制器定时器T0定时打包车速数据帧发送到总线。节点自检程序由上电时自动检测和定时器定时自动检测两部分构成,确保各个单元工作正常。为了程序的实时性和可靠性各个节点嵌入实时操作系统 μC/OS-II。

图4 系统软件设计流程
5 节点电磁兼容设计
考虑到HEV大巴工作在恶劣,干扰严重,多种噪声的工况中,各个节点除具有完善的功能外,还应具有强的抗干能能力。硬件抗干技术是节点设计中首选的抗干扰措施。
①精心挑选元器件
②混合动力电动汽车上电机设备中的IGBT和功率二极管工作时,会产生很强的电磁干扰,尤其是共模干扰较为严重。因此有必要在电池组与整车之间连接高频旁路电容,抑制干扰源。
③采用光电耦合器将外部通信接口与内部CPU电路隔离开来,可以阻止电路性耦合产生的电磁干扰。
④汽车中输入信号的频率比较低,加低通布线尽可能的短和直,滤波器切断高频干扰的传播。
⑤PCB中的高频信号(如晶振的时钟信号)的布线尽可能的短和直。
⑥数据线地址控制线要尽量的短,减少对地电容。
⑦地址线长度尽可能的一致,以免造成各线的阻抗差异过大。使地址信号传输过程中到达终端的波形差异过大,形成控制信息的非同步的干扰。
⑧根据解耦电容的工作原理,芯片尽量从储能电容吸收能量,减少从电源线上吸收的能量。人为增加解耦电容。
⑨采用DC/DC变换模块,提供稳定的隔离电源,对不同节点分别供电,可以有效地消除电源干扰和共地产生的干扰。
⑩多层板能偶减小共模阻抗和感性耦合。
因为文中系统通信频率较高故采用抗电磁干扰性能强的双绞高温屏蔽电缆。再加上CAN总线本身强有力的纠错能力,使整个系统更加稳定。
6 结论
文中系统是在大巴的制动系统的基础上发展而来,在HEV大巴运行阶段,数据传输可靠、稳定。实际运行所做的统计数据表明,该系统能够使城市HEV大巴的续使里程增加20%。能量回馈效率的优化是个动态寻优过程,算法非常复杂,无法通过离线试验得出一劳永逸的经验公式,因此在动力总成节点建立一个模型参考自适应系统,对重要参数进行在线辩识。
[1]张毅,杨林等.电动汽车能量回馈的整车控制[J].汽车工程,2005(1):25-27.
[2]陈显奎.CAN总线在大中型客车中的应用[J].电子技术.2007(z3):52~63.
[3]肖玉萍.混合动力电动汽车电池管理系统[D].北京工业大学硕士学位论文,2005.6.
[4]过学迅,张靖.混合动力电动汽车再生制动系统的建模与仿真[J].武汉理工大学学报,2005(1):116-120.
[5]万佳,黄菊花,等.ADWI80B在混合运动汽车运动造型及参数匹配上的应用[J].森林工程,2008(1):41-44.
[6]Jean J.Labrosse著,邵贝贝等译.嵌入式实时操作系统μC/OS-II[M].北京:北京航空航天大学出版社,2003(8).
[7]任哲.嵌入式实时操作系统μC/OS-II原理及应用[M].北京:北京航空航天大学出版社,2005(8).
