基于三相旋转变换与极坐标变换的电机矢量控制
2012-07-25苏翀,韩兵
苏 翀,韩 兵
0 引言
根据交流电机矢量控制基本原理,对电机动态模型作3/2变换和旋转变换后,按转子磁链定向控制可以得到良好的控制效果,这种矢量控制是目前最为先进的电机控制方案。但是在实际实现该矢量控制时,采用了交流电流跟随器,这给设计实现非线性系统的完全跟踪带来了困难,或者需要计算逆旋转变换,所以这种矢量控制系统,实际上是一种非常复杂的,对控制变量检测、计算和实现,都要求性能非常好的控制系统,如果实现方案对这些2/3变换、旋转变换的参数计算精度得不到满足,就难以保证矢量控制的理论性能。为了得到矢量控制系统良好的系统性能,需要研究矢量控制新的设计的方法,并且考虑将 SVPWM 和交流电机的动态模型复合对象的控制模型。
1 电机3相同步旋转变换
根据三相异步交流电机矢量控制的动态数学模型,采用3/2变换和同步旋转变换的方法得到方程公式(1)、(2)


ψr得公式(6)

可知按转子磁链定向时,电机模型得到了降阶,矢量控制系统原理结构图,如图1所示:

图1 矢量控制系统原理结构图
由于要实现电机交流电流的完全跟随控制,这种非线性跟踪控制器的实现是非常困难的。为了简化实现方案论文引入3相旋转变换,

得到的实现,如图2所示:

图2 采用3相旋转变换的矢量控制方案
2 电机变换动态模型
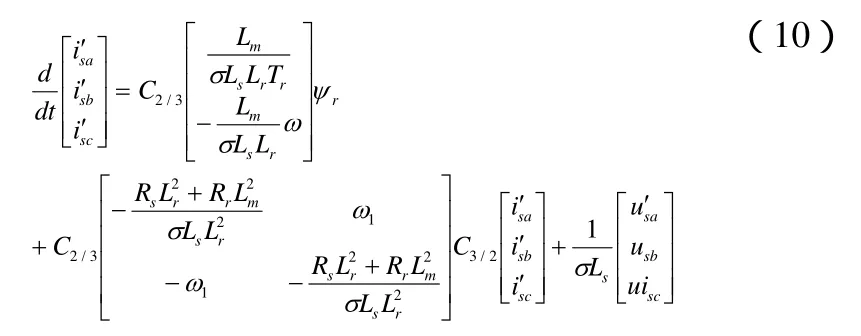
于同步旋转变换的转子磁链与按转子磁链定向的磁链仅相差一个固定的角度,因此转子磁链ψrd,ψrq与ψr满足旋转,见公式(7)、(8)、(9)、(10)

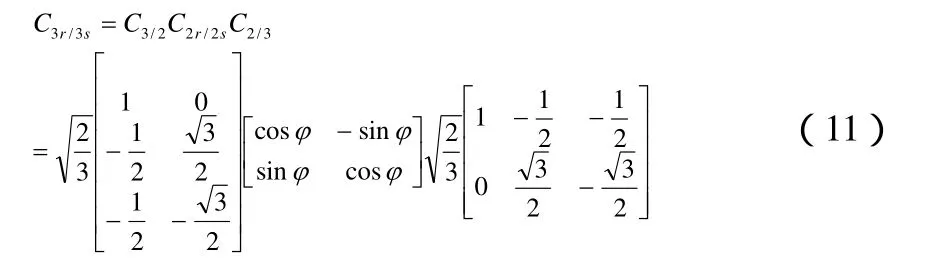
3 相逆旋转变换
见公式(11)
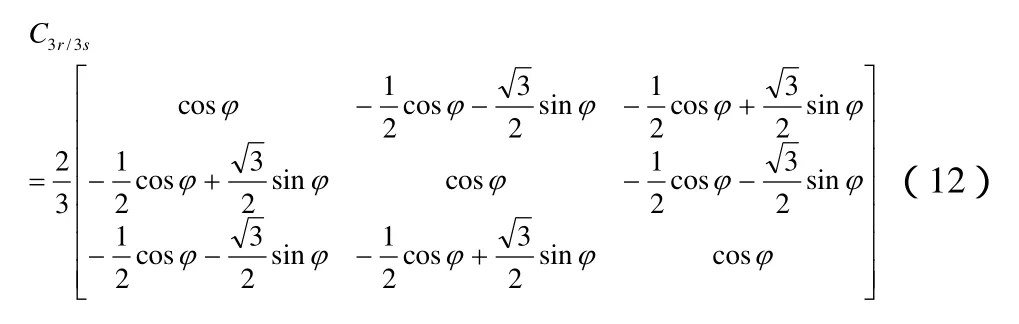
得公式(12)
电流的逆旋转变换,见公式(13)、(14)、(15)


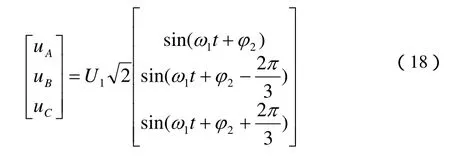
同理,电压3相逆旋转变换整理的公式(18)
由公式(13)得到公式(16)、(17)、(18),是电流由逆旋转变换到极坐标的变换结果,如图3所示:

图3 电压矢量的极坐标表示
可以利用U1、1ω和2φ计算SVPWM的矢量电压,这样就可以实现按转子磁链定向的矢量控制。
3 逆3VR/极坐标变换的矢量控制实现
由电机逆3VR/极坐标变换模型公式(8)、(9)与公式(16)、(17)、(18),可实现新的交流异步电机的矢量控制方法与SVPWM结合的实现方案,实现方案,如图4所示:
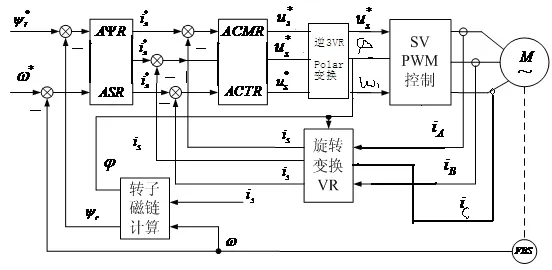
图4 逆3VR/Polar变换与SVPWM的矢量控制实现方案
将逆3VR与极坐标变换合并,加入到ACR中矢量控制实现得到了良好简化和改进,如图5所示:

图5 简化和改进的矢量控制实现方案
4 结论
交流异步电机采用矢量控制方案,可以得到良好的性能,采用3相同步旋转与极坐标变换的方法,可建立新的电机旋转变换和极坐标矢量电压控制模型。由于这个模型具有直流电流调节器提供的矢量电压模和旋转角,显然方便SVPWM进行变频变压控制。分析变换使得电流跟随控制器为直流调节器,可在直流线形电压电流模型条件下设计电流反馈环,简化和改进的方案为矢量控制的实现提供了新的手段。
[1]阮毅,陈维钧; 运动控制系统[M].北京:清华大学出版社,2006:195-196.
[2]祝晓辉,李颖晖,陈亚滨.基于非线性状态观测器的永磁同步电动机无位置传感器矢量控制[J].电工技术学报,2010,1:50-57.
[3]郝双晖,唐梓力,郝明晖,刘杰.高速电机高精度伺服控制[J].天津大学学报,2010,5:411-416.
[4]郭瑞,王庆贤.按转子磁链定向的矢量控制系统仿真研究[J].黑龙江科技信息,2010,9:40-41.
[5]陈中,顾春雷.基于 Matlab按转子磁链定向矢量控制系统的仿真[J].合肥工业大学学报(自然科学版) ,2009,9:1332-1334.
[6]刘璇,刘忠举.基于转子磁场定向的直接转矩控制[J].船电技术,2011,2:26-29.
