交通信号灯智能控制算法研究
2012-07-25叶尔江哈力木曼苏乐张秀彬
叶尔江·哈力木,曼苏乐,张秀彬
0 引言
交通信号灯的智能控制关键在于交通信息的获取。当前,尽管获取交通信息的方法多种多样,如:通过分析城市道路交通流量变化的特点,提出一种基于数据融合的监测方法[1];基于不同相位的动态最小时间需求,并以相位通行需求时间为研究对象,以动态相位时间差为状态转换控制目标,建立了单路口交通信号控制的一种动态智能控制方法[2];使用云理论的基本算法处理公交车辆反馈信息,对含有不确定性的多维度公交信号综合处理,并综合各种道路信息以决定交通信号灯的通行时间长度方案[3]。然而,这些方法均未涉及到自动采集、处理与分析路口交通流量信息的核心技术问题。
就信息传感技术而言,目前大多数城市交通信号灯控制方法基本上还是采用感应线圈等设备来获取交通信息。由于这种交通量检测设备需要埋设在道路下面,使得安装与维护都很不方便,经济成本高、抗干扰性差而且感应范围极为有限,难以普遍推广。
随着“电子警察”应用的日益普及,在城市的许多交叉路口早已装配采集交通流量的摄像装置。尽管配置这些摄像装置的初衷是用于人工监控,但是,这些摄像装置无疑可以成为拾取道路车流图像信息的硬件基础。显然,基于图像信息的视感技术必将成为获取交通(车流)信息的重要手段之一,特别是在城市交通信号灯的智能控制中能够起到越来越重要的作用。然而,要实现交通系统智能化,却不是一项简单的技术,关键在于如何充分、有效和实时地获取交通信息。
1 系统构成
本文所提出的交通信号灯智能控制算法,如图1、图2所示:

图1 系统组成框图

图2 摄像头现场配置与平面坐标设置图例
以单交叉路口为例,该系统包括:四个CCD摄像头、信号处理器和控制器,其中:四个CCD摄像头分别安装在路口的四个来车方向上且距地面的高度为H(H取值范围为8m~10m),四个CCD摄像头的输出端分别与信号处理器的输入端相连以传输图像信号,信号处理器的输出端与控制器的输入端相连以传输控制指令,控制器的输出端与交通信号灯的继电开关电路相连以传输电压驱动信号。
2 控制算法
控制算法由8个运算步骤组成。
步骤1:建立世界坐标系,如图3所示:

图3 算法坐标系
将世界坐标系中的Zj轴与直行/左转行车方向分界线重合且指向行车的方向为正方向,令Xj为零,将原点设置在停车线与行车方向分界线的交点上,Yj轴与停车线重合且以行车的左侧为正方向。
每个摄像头均各自根据计算机图像坐标系像素点坐标(u,v) 和世界坐标系空间三维坐标(Xj,Yj,Zj) 之间的关系标定其内、外参数值[4]。
步骤2:对摄像头得到的车流图像依次进行畸变校正、锐化和透视变换处理[5],如图4所示:

图4 校正、锐化和透视变换处理
步骤3:采用Canny边缘算子检测方法提取上一步得到的车辆图像的边缘,并根据数学形态学滤波法滤除边缘检测图中的杂线条,即去除图像中的非车辆边缘线的车道线和交通标志箭头,见图5所示:

图5 边缘检测与处理示意图
步骤4:对步骤3获取的图像按照道路行车类型进行切割,如将图像中的每个方向上等待通行的机动车道路分别按右转、直行和左转三种类型沿着行车类型分界线进行切割,得到三幅分别为右转、直行、左转行车类型的车辆边缘检测子图,如图6所示:

图6 行车类型切割示意图
步骤5:分别对三幅车辆边缘检测子图进行边界像素投影,即每种类型车道上车辆的边界像素分别向Zj轴所对应的计算机图像坐标系进行直线投影且累加边界点得到每种类型车道上边界像素点累加分布图,如图7所示:
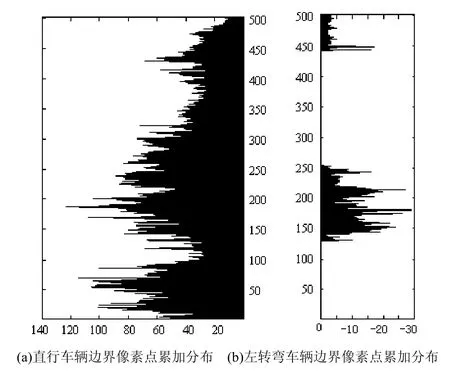
图7 边界像素投影图
进而得到计算机图像坐标系下每个方向每种类型车道上等待通行车辆排队长度的像素分布。每种类型车道上等待通行车辆排队长度即为该类型车道上边界像素点累加分布图上所对应的最后一个边界像素点的坐标参数值。
步骤 6根据计算机图像坐标系图像中等待通行车辆排队长度的像素分布和计算机图像坐标系与世界坐标系的转换关系,得到世界坐标系中每个方向每种类型车道上等待通行车辆的排队长度。
步骤 7根据车速和车辆的排队长度,得到每个方向每种类型车道上车辆全部通行所需的时间,即其中,表示第j个方向第i种类型车道上车辆全部通行的时间,表示第j个方向第i种类型车道上车辆实际的排队长度,i=1, 2, 3,i=1代表“直行”、i=2代表“左转弯”、i=3代表“右转弯”;j代表道路编号,对于十字路口,j=1,2,3,4,j=1代表由东向西的路口,j=2代表由西向东的路口,j=3代表由南向北的路口,j=4代表由北向南的路口;V代表车辆通过路口的规定车速,τ为车辆从停车线开始通过路口所需要的时间。
步骤 8 根据得到的每个方向每种类型车道上车辆全部通行的时间,控制交通信号灯的开启和关闭。当第j个路口第i种类型车道上车辆全部通行的时间时,将该车道的绿灯时间设为Tm;否则,将该车道的绿灯时间设为其中,Tm是设定的单向最长通行时间阈值。如:V=6kmh,直行车辆排队长度τ=3s;则该直行“车队”全部通过路口所需要的时间T=28.2s。
从此,多条机动车道以及人行横道红、绿、黄灯的切换规律能够根据上述提供的车辆实际排队长度判定方法予以优化。
3 实验效果
上述算法已经加载于现有城市路口的多处“电子警察”系统。
CCD摄像头采用MV-VS142FM/FC高分辨率工业数字CCD摄像机,采用连续采集图像。该系列型号摄像机以IEEE 1394作为输出通信协议,直接输出数字图像信号而且信号稳定,CPU 资源占用少,一台嵌入式系统同时连接若干台摄像机,十分适合交通路口的车流图像信息采集。
4 总结
实测结果已经证实,本文算法与现有技术相比具有如下有益效果:(1)能够对交叉路口的车流状况及其车辆排队长度进行自动检测,包括:右转、直行、左转三种行车方向的车辆排队长度;(2)能够根据车辆排队长度准确计算出车辆通过路口所需要的时间,因此能够高效、节能地控制交通信号灯的启闭时间,为最终实现城市智能交通提供科学的信息基础。
[1]陈佳,闾立新. 数据融合技术在智能交通系统中的应用[J]. 微型机与应用,2011,30(8):83-85
[2]马跃峰,王宜举. 一种基于Q学习的单路口交通信号控制方法[J]. 数学的实践与认识,2011,41(24):102-106
[3]罗金玲. 云控制器在智能交通信号灯控制中的应用研究[J]. 计算机测量与控制.2011.19(4):842-844
[4]张秀彬、应俊豪. 视感智能检测[M]. 北京:科学出版社,2009:81-89
[5]张秀彬、应俊豪. 智能视感学[M]. 北京:中国水利水电出版社,2010:26-79
