外转子无刷直流电动机无位置传感控制技术研究
2012-07-23姜卫东汪正玲
姜卫东,赵 勇,邢 栋,汪正玲
(合肥工业大学,安徽合肥230009)
0引 言
无刷直流电动机运行时需要采用位置传感器检测转子磁场位置信号[1],并利用其输出信号,通过电子换相电路,按照一定的逻辑顺序去导通功率器件,驱动电机的正常运转。传统的位置传感器件如霍尔元器件、旋转变压器等需要装配在电机内部来检测转子位置信号,由于特殊的电机结构设计,其安装和维修都极其的不方便。因此无刷直流电动机无位置传感技术的研究日益受到人们的关注,而反电势法是诸多无位置传感控制技术中比较成熟的一种方法,本文提出的改进的反电势法所需的硬件简单,控制精确、稳定,通过实际的实验证明该方法是正确、有效的。
1无刷直流电动机运行原理
本文以星形连接、两两导通三相六状态无刷直流电动机为研究对象,图1为无刷直流电动机控制原理框图,逆变器件以PWM调制方式工作,控制器以Freescale 56F8013为核心。
对于三相六状态120°导通方式,各功率管的导通顺序是 S0S3、S0S5、S2S5、S2S1、S4S1、S4S3,当导通功率管S0S3时,电流经S0管从A相流入,从B相流出,经S3管回到电源的负母线,此时在电机定子绕组中产生旋转磁场,使转子旋转,这样在上述六个状态的循环轮流导通下,转子不断的连续旋转。改变各功率管的导通顺序就可以改变电机的旋转方向。

图1 无刷直流电动机控制原理框图
2“反电势法”位置检测的实现
2.1“反电势法”无刷直流电动机控制原理
对于两两导通三相六状态的无刷直流电动机来说,当给任意两相的绕组通电后,定子绕组中的电流将会产生合成磁场,合成磁场将会使电机的转子在某个方向产生一定角度的转动。而当转子产生转动的时候,由于无刷直流电动机定子绕组的存在,将会因切割导体磁力线的作用而产生感应电动势,且方向与绕组中流过的电流方向相反,所以称之为反电动势或反电势。对于理想状态下的电机磁场波形基本上为方波,如图2所示[2]。

图2 方波气隙磁场分布
如果无刷直流电动机的气隙磁场的波形为方波且定子绕组为集中整距绕组时,在不考虑其他因素的情况下,电机的感应电动势为梯形波,如图3所示[2]。

图3 梯形波反电势与方波电流
在不考虑其他因素的情况下,反电势过零点出现后的π/6电角度即是无刷直流电动机的换相时刻。理想状态下无刷直流电动机三相反电势波形图如图4所示。
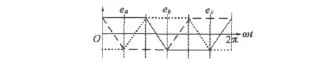
图4 理想状态下无刷直流电动机三相反电势波形图
由图3和图4可知,如果想准确地判断出转子的位置,反电势过零点的检测就必须准确及时。当检测到过零点信号后,通过软件将过零点信号延时π/6电角度后,就可获得电机的换相信号,根据换相信号导通相应的功率管就可以实现无刷直流电动机的换相,驱动无刷直流电动机的正常运转。此即为反电势过零点法实现的依据。
2.2传统“反电势法”控制原理
传统的“反电势法”是搭建虚拟的电机中性点,然后将电机的三相相电压分压后与虚拟中性点比较,输出的信号即为反电势的过零点信号。但分压后的相电压信号不可避免地带入了控制系统中功率管开通和关断时产生的毛刺、PWM斩波、电磁噪音等干扰,如果不处理,将会使输出产生虚假的过零点信号,所以需对输入信号进行低通滤波,传统的“反电势法”过零检测电路如图5所示。

图5 传统“反电势法”过零检测原理框图
传统“反电势法”方法原理和检测电路都比较简单,因而较容易实现。但是在开关管高频PWM时,容易引入很高的共模电压和高频噪声,且由于引入了低通滤波,易使在不同的转速下产生不同的信号移相,位置检测不准确。并且由于在转速较低、反电势很小的情况下,检测电路很难准确地检测出反电势过零点,所以电机的调速范围有一定的限制。
2.3改进的“反电势法”控制原理
改进“反电势法”的控制原理与传统“反电势法”是基本相同的,都是检测反电势过零点信号,只不过它将传统“反电势法”中的分压电阻改为反并的二极管,通过二极管的正相导通、反相截止原理可以准确地将绕组反电势过零点检测出来,检测原理图如图6所示,图中,R为串入的限流电阻,r为电机内阻。

图6 改进的“反电势法”过零检测原理框图
将分压电阻改为反并的二极管后,可以不用考虑在不同反电势下的电阻分压比,流入比较器的电压始终是一个二极管的压降,避免了因为反电势电压变化而带来的精度不准确的误差。而传统的“反电势法”阻值分压比一般是按照最高反电动势来设计的,这就不可避免地出现在转速低、反电势小的情况下位置检测难实现、不准确的问题,而采用的反并二极管可以很好地避免这个问题,在很低转速下都可以准确地实现位置检测的功能,所以可以实现大范围的调速功能,转速n=40 r/min的实测的三相检测信号如图7所示。需要注意的是,在实际的实验过程中发现在串入反并的二极管后,由于二极管压降的存在,会导致检测到的位置信号比过零点信号滞后一个固定的电角度,在软件延时时需要做一定的补偿。

图7 转速为40 r/min下实测的三相检测信号
3系统软件的设计
由于本控制系统采用的是无位置传感器设计方案,因此检测电路正确及时地检测到转子位置信号是非常重要的。系统的程序设计思想主要分为转子定位、开环起动、闭环控制三个步骤。电机的起动是通过发固定脉冲,按逆时针转动方向轮流的导通开关管使电机旋转,当获得电机的过零点信号后电机切换为自同步运行,实现电流转速双闭环,驱动电机稳定工作,主程序流程图如图8所示。

图8 主程序流程图
4实验结果
以一台额定电压三相380 V、额定功率1.7 kW、额定转速1 200 r/min、额定转矩14 N·m,八极外转子无刷直流电动机为样机进行了实验,利用MAGTROL测功机给无刷直流电动机做负载性试验,通过实验证明采用上述无位置传感控制技术,电机系统起动平稳,无振动和失步现象,调速范围为20~1 200 r/min,样机和控制器测试平台以及实验波形如图9~图12所示。

图9 样机和控制器测试平台

图10 三相检测信号与反电势波形

图11 电机空载运行时电流波形

图12 电机额定负载运行时电流波形
5结 语
实验过程中观测到的波形与理论分析基本符合一致。由实验结果可以看出,整个控制系统较好地实现了对无位置传感器无刷直流电动机的起动和稳定调速,电机在满载情况下的运行情况也比较理想。无位置传感器无刷直流电动机可在恶劣的工作环境下工作,受干扰比较小,可靠性高,成本较低,具有广阔的市场前景。
[1] 黄玉,王剑,陈瑜.无刷直流电机的新型转子位置检测方法[J].山东大学学报(工学版),2003,33(3):287-291.
[2] 郑许峰.“直接反电势法”无刷直流电机控制系统的设计和研究[D].南京:东南大学,2006.
[3] 陈新,吴崇理.DSP56800E控制器原理及其应用[M].北京:电子工业出版社,2007.
[4] 王兴华,励庆孚.永磁无刷直流电机空载气隙磁场和绕组反电势的解析计算[J].中国电机工程学报,2003,3(23):126-130.
[5] 陈磊,高宏伟,柴凤.小型无刷直流电动机振动与噪声的研究[J].中国电机工程学报,2006,26(24):148-151.
[6] Cifuentes A O,Kalbag A.A performance study of tetrahedral and hexahedral elements in 3-D finite element structural analysis[J].Finite Element in Analysis& Design,1992,12(3-4):313-318.
[7] 黄平林,胡虔生,余莉.集中绕组永磁无刷直流电机电枢反应及绕组电感的解析计算[J].中国电机工程学报,2005,25(12):127-132.
[8] Yamazaki K.A Quasi formulation for analyzing characteristics of induction motors with skewed slots[J].IEEE Transactions on Magnetics,1998,34(5):3624-3627.
[9] Valtonen M S M,Parviaiene D S A,Pyrhānen J.Electromagnetic filed analysis of 3D structure of axial-flux solid-rotor induction motor[C]//International Symposium on Power Electronics,Electrical Drives,Automation and Motion.Taormina,Italy,2006.
[10] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
