永磁同步电动机在电动舵机伺服系统中的应用
2012-07-23李兵强兰根龙
吴 春,齐 蓉,李兵强,兰根龙
(西北工业大学,陕西西安710129)
0引 言
舵机是飞行器飞行控制系统中的执行机构,控制舵面的运动,实现飞机器的升降、滚转、偏航。目前广泛使用的液压舵机具有出力大、灵敏度高、工作安全平稳的特点,但整个系统结构复杂、质量大、成本高。而随着电力电子器件、高性能数字信号处理芯片、稀土材料的发展,电动舵机系统结构简单、体积小、质量轻、成本低等优势越来越突出,日益引起人们的重视[1]。
永磁同步电动机转子上无绕组,结构简单、可靠性高,与传统电励磁电机相比,在同等功率条件下具有明显的体积、质量、性能优势[2-5],非常适用于航空航天领域。本文主要研究永磁同步电动机在电动舵机伺服系统中的应用。
1永磁同步电动机数学模型
假设磁场在气隙中呈正弦分布,忽略磁场谐波和磁路饱和影响,不计磁滞、涡流损耗,定子绕组为Y型连接,绕组电流为对称的三相正弦波电流,在两相旋转的上,建立永磁同步电动机d-q坐标系的数学模型[5]。PMSM电压方程:

PMSM磁链方程:

PMSM转矩方程:

PMSM运动方程:

式中:ud、uq分别为定子在 d、q轴电压;id、iq分别为定子在d、q轴电流;Ld、Lq分别为定子在 d、q轴电感;ψf为永磁体励磁磁链;ψd、ψq分别为定子在 d、q轴上的磁链;r为定子电阻;Te、TL分别为电磁转矩、负载转矩;J为转子转动惯量;p为电机极对数;ω为转子电角速度,ωr为转子机械角速度,ω=pωr;B为摩擦系数。
2系统总体设计方案
本系统采用三闭环矢量控制策略。三环依次为位置环、速度环、电流环,均采用PID控制,永磁同步电动机空间矢量控制采用id=0控制策略[5]。永磁同步电动机伺服系统三闭环矢量控制结构图如图1所示。
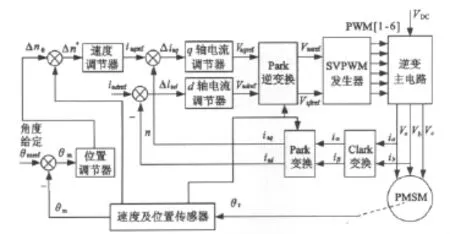
图1 永磁同步电动机三闭环矢量控制结构图
3系统硬件设计
整个系统由永磁同步电动机、三相逆变电路、转子位置速度传感器、舵面位置传感器/控制驱动电路、通信接口、电源变换电路等组成。系统结构框图如图2所示。

图2 系统结构框图
本系统母线电压为115 V(DC),控制器电源为28 V(DC),隔离芯片选用数字隔离芯片 ADUM1401;功率器件选用分立 IGBT,型号为IRG4PSC71UD;减速器的减速比为256∶1。
3.1转子位置速度采集
这里采用旋转变压器实现转子位置与速度的检测,选用 Tamagawa公司的 Singlsyn系列型号为TS2223N12E102的磁阻型旋转变压器,如图3所示。该型旋转变压器体积小、安装使用方便、工作温度范围宽、可靠性高,并可与电机一体化设计。
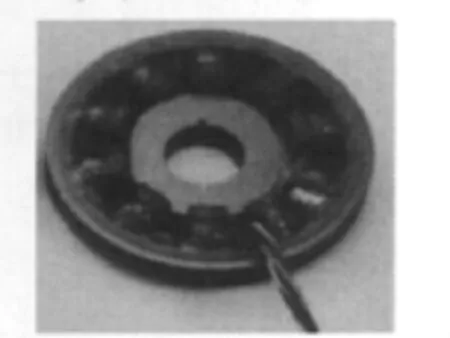
图3 旋转变压器
解码芯片选用 AD2S1210。AD2S1210输入为旋转变压器的正弦信号,输出为被测旋转体的转轴位置和角速度数字信号,该数字信号可以通过DSP的外部数据总线或SCI通信接口直接读入,使用方便、测量精度高、动态响应快,被广泛用于现代伺服控制系统中[6]。AD2S1210的分辨率可由外部引脚设置,有 10、12、14、16 bit四种模式,这样的设计扩大了测速范围和提高了测量精度。在激励频率为8.192 MHz时,对应的最大跟踪速率分别为1 50 000 r/min、60 000 r/min、30 000 r/min、7 500 r/min。由于永磁同步电动机是2对极的高速电机,最高转速可达14 000 r/min,因此选用12 bit的分辨率,1LSB对应位置的0.087 9°和机械转速的14.652 0 r/min。AD2S1210还可以实现并行或串行两种输出模式,本系统采用并行输出,即DSP通过16外部数据总线,一次型读入转子位置和速度信息,从而缩短了读取时间。图4为AD2S1210芯片的外围电路。
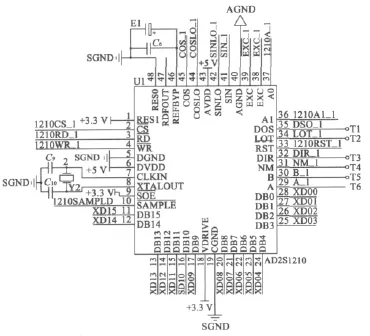
图4 AD2S1210芯片的外围电路
3.2舵面位置信号采集
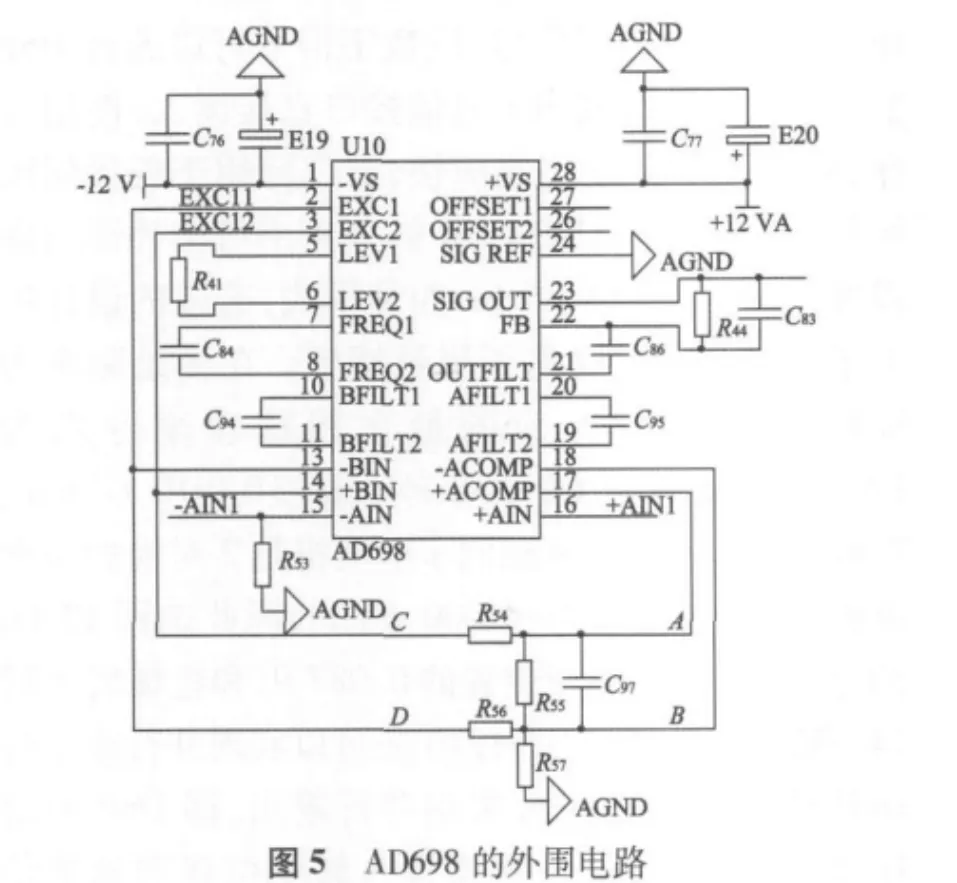
舵面位置通过测量滚珠丝杠的直线移动位置来间接测量。测量的传感器选用UD19-±50mm型线性位移差分变压器(LVDT),相应的驱动与检测芯片采用AD698[7]。AD698将LVDT的位移信息转变为单极性或双极性的直流电压,该电压经调理、滤波、限幅后进入DSP的ADC通道。图5为AD698的外围电路。
3.3驱动电路设计
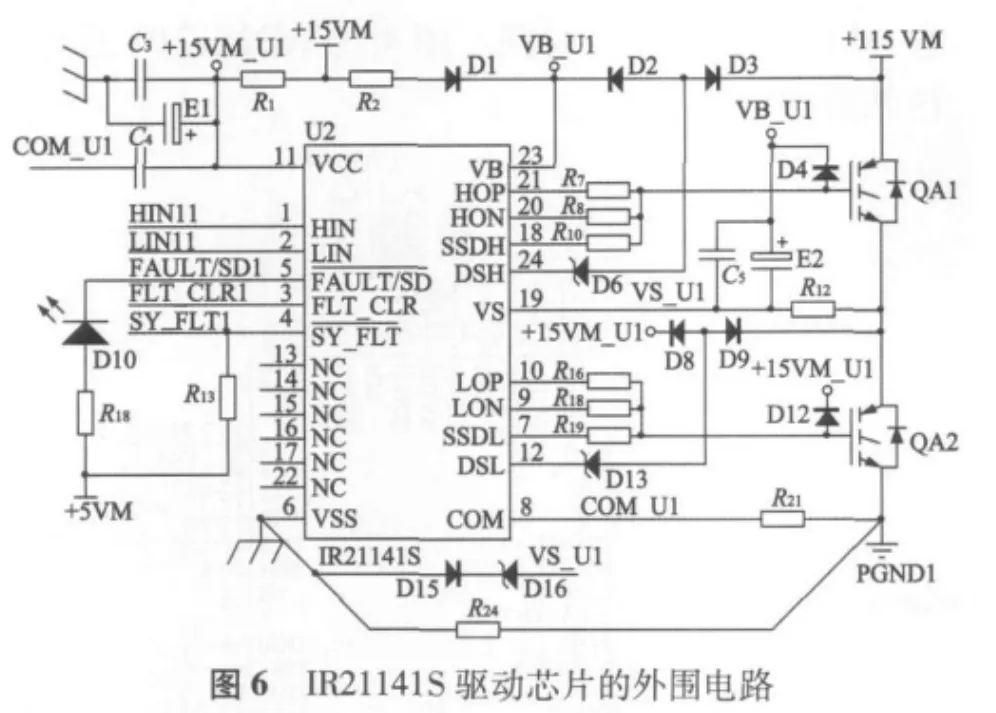
驱动与保护电路由隔离电路和电机驱动电路组成。DSP控制信号先通过8数据总线传送器SN74LVC245ADW,再经磁隔离芯片ADUM1401,传至IGBT驱动与保护芯片IR21141S,驱动永磁同步电动机运转[8]。图6为IR21141S驱动芯片的外围电路。
4实验结果分析
本系统包括一台2.2 kW、额定电压115 V、额定转速12 000 r/min,极对数为2的永磁同步电动机,位置环、速度环、电流环三环的中断频率分别是200 Hz、1 000 Hz、10 kHz。当断开位置环,仅调试电流环,验证电机的高速和低速特性,分别如图7、图8所示。
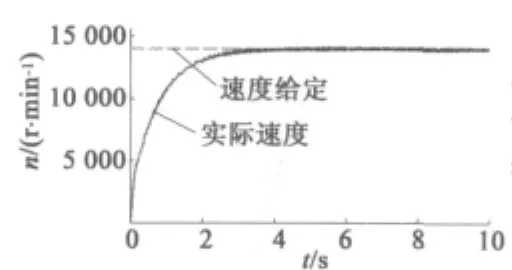
图7 速度给定为14 000 r/min响应图
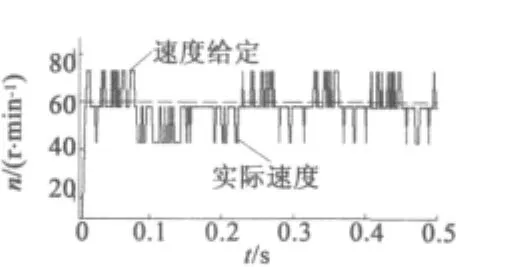
图8 速度给定为60 r/min响应图
从图7、图8可以看出,电机具有较快的响应速度,稳态跟踪平稳。图8中速度在60 r/min上下波动,是由于传感器的最小分辨率为14 r/min,并且其自身有±1LSB的误差,因此在60 r/min附近有±14 r/min的波动。如果设置AD2S1210的输出为14 bit或16 bit,分辨率提高,低速跟踪性能将更好,波动更小。
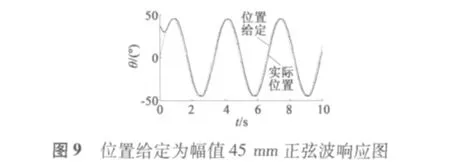
在模拟舵面的负载台上,加上额定1.8 N·m负载,系统的位置跟踪如图9、图10所示。可以看出,电机具有良好的位置跟踪性能,响应速度快,稳态跟踪平稳。图11为该系统永磁同步电动机和控制驱动器实物图。


5结 语
基于DSP 2812和驱动芯片IR21141S,设计了永磁同步电动机电动舵机伺服系统。实验结果验证了本套伺服系统速度、位置都具有较好的动态性能和稳态精度,完全可以满足电动舵机性能要求。
[1] 汪军林,解付强,刘玉浩.导弹电动舵机的研究现状及发展趋势[J].飞航导航,2008(3):42-46.
[2] 李永东,张猛.高性能交流永磁同步电机伺服系统现状[J].伺服控制,2008(1):34-37.
[3] 金如麟,谭茀娃.永磁同步电动机的应用前景[J].上海大中型电机,2001(3):9-13.
[4] 褚立新,林辉.空间变速扫描用高精度永磁同步电动机伺服系统仿真研究[J].微电机,2009,42(6):59-62.
[5] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[6] 邓力,卢刚,李声晋.基于AD2S80A的双路RDC测角系统及接口设计[J].微特电机,2009,37(8):12-14.
[7] 王敬亭,廖力清,凌玉华.AD698型LVDT信号调理电路的原理与应用[J].国外电子元器件,2005(9):63-64.
[8] 陈志强,宋凡峰.基于IR2214芯片的大功率IGBT晶体管驱动及保护电路的设计[J].江苏电器,2008(7):10-14.