基于容错逆变器的永磁同步电动机矢量控制
2012-07-20李小川李艳玲
李小川,王 明,李艳玲
(1.西安长庆科技工程有限责任公司,陕西西安710018;2.长庆油田公司第七采油厂,甘肃环县745700)
0 引 言
随着永磁同步电动机(PMSM)广泛应用于风机、水泵、数控机床、船舶推进、工业机器人以及航空航天等交流调速应用领域,人们在提高系统控制性能的同时也进一步提出了系统具有故障时的可持续运行能力。目前,对于交流电机调速系统故障检测、诊断及容错运行的研究已受到人们的广泛关注。研究人员不仅对电机、逆变器及传感器的故障诊断进行了深入研究,同时也对调速系统的容错控制策略进行了大量的研究。Jason D.Ede[1]研究了一种容错永磁同步电动机并针对其单相绕组故障提出了最优转矩控制策略,Silverio Bolognani[2-3]针对永磁同步电动机驱动控制中逆变器功率器件发生故障时的一种四桥臂容错逆变器控制策略,可以保证在不同桥臂故障时电机产生平稳转矩输出。R.L.A.Ribeiro等人[4-5]研究了交流电机控制系统逆变器故障后,通过双向晶闸管使逆变器拓扑结构转换为四开关逆变器,简化后的四开关逆变器不增加系统硬件成本,而且可以保障容错后的系统运行稳定。ZHANG Lanhong[6]研究直接转矩控制下的交流电机控制系统容错策略,并且分别对常规的直接转矩和使用空间矢量调制的直接转矩进行了容错策略分析,提出的容错策略均能有效控制电机系统在故障下的持续运行并能保持直接转矩控制优良的动态特性。
本文由分析永磁同步电动机数学模型和一种容错逆变器入手,并根据常规六开关三相永磁同步电动机电流特性,提出一种永磁同步电动机矢量控制逆变器容错运行策略,该策略可以在逆变器发生故障时有效控制电机稳定运行,并可以保持原系统的运行特性。最后通过MATLAB仿真软件对本文方法进行验证。
1 容错逆变器结构及其工作原理[5]
1.1 逆变器结构
图1(a)为本文研究的容错逆变器本体结构,由六个功率开关管(S1、S2、S3、S4、S5、S6)、4 个双向晶闸管(TRa、TRb、TRc、TRn)、3 个快速熔断丝(Fa、Fb、Fc)、两个“劈相”电容(C1、C2)组成。其中S1 和S2构成A相桥臂,S3和S4构成B相桥臂,S5和S6构成C相桥臂。

图1 容错逆变器容错前和容错后的拓扑结构
容错逆变器如图1(a)所示,在正常工作期间,六个功率开关正常工作,与电机绕组相连接的四个双向晶闸管处于关断状态。在电机正常运行状态中,其定子电压矢量可以表示:

在逆变器发生故障时,容错控制策略由实时故障检测结果进行故障诊断,然后根据故障诊断结果进行相应的故障容错处理。逆变器侧故障主要包括逆变器开关器件短路和开路故障。例如当逆变器C相桥臂短路或开路时,容错控制策略由检测和诊断结果迅速隔离逆变器故障相(C相)桥臂,逆变器以四开关状态运行,故障相定子绕组切换到电容中点。此时,过大的电流将熔断丝Fc烧断,容错控制发出指令,停止故障相两个开关的触发信号同时发出导通晶闸管TRc的触发信号。逆变器A相和B相桥臂故障处理与以上分析相似。由此,在逆变器某个开关故障下,系统具有正常工作的能力。其中,双向晶闸管TRn主要用于电机侧绕组故障处理,考虑在实际应用中逆变器侧故障较为频繁,本文对电机侧故障不作讨论。
1.2 容错后的四开关三相逆变器
容错逆变器不同相桥臂分别发生故障后,经容错策略驱动,逆变器转换为容错后的四开关三相逆变器拓扑结构。图1(b)为C相桥臂故障后的新逆变器拓扑结构。A相、B相和C相桥臂容错后的逆变器电压矢量方程分别:

逆变器A相、B相和C相桥臂分别故障后,容错后的逆变器电压矢量如表2所示。

表2 逆变器在三种容错方式下的电压矢量
正常逆变器和三种容错方式下的逆变器的电压矢量在定子静止坐标系αβ下的空间分布如图2所示。

图2 正常逆变器和三种容错方式下的逆变器的四个电压矢量空间分布
由图2可以知道,在逆变器正常工作状态下,逆变器发出八个常规电压矢量,其中包含两个零矢量,其它六个矢量在空间平面上呈60°对称分布。当逆变器故障后,不同相的故障后发出的电压矢量分布是不同的,四个不同幅值的电压矢量在空间平面呈90°对称分布。四开关逆变器调制出的最大电压幅值为正常逆变器的一半。
2 容错控制方案
由以上分析知道,当容错逆变器发生故障时,逆变器拓扑结构由六开关三相结构切换到四开关三相结构,电机仍然具有持续工作的能力。当逆变器C相开关故障前和故障后,电机三相定子绕组的C相电流可以表示:

由式(5)可以知道,只要同时控制住A相和B相定子电流,C相定子电流就可以得到有效控制。这样,当容错逆变器C相桥臂故障时就可以实现对电机三相定子电流的有效控制。对于容错逆变器A相和B相容错的分析与以上分析相同。综上所述,对于容错逆变器下的永磁电机矢量控制,当任意一相逆变器开关故障时,控制其它两相电流并切换逆变器拓扑结构仍然可以实现电机的三相绕组持续工作能力。
图3为提出的容错逆变器下的永磁同步电动机矢量控制方案结构框图。控制方案采用参考直轴电流=0的速度和电流双闭环控制方式。系统基本控制结构和常规的永磁同步电动机矢量控制相同,不同之处在于系统采用了容错逆变器和相应的容错策略。系统主要有PI转速控制器、dq/abc坐标变换、滞环电流控制器等,参考交轴电流()可以通过转速PI控制器得到。
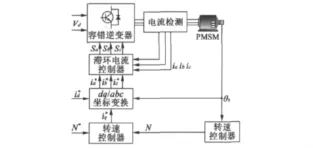
图3 控制方案结构框图
3 仿真结果
为了验证所提出的控制策略,本文在MATLAB中进行了仿真研究。仿真中使用的电机参数如表3所示。图4(a)为逆变器在正常运行状态和三种故障状态下的电压矢量轨迹。在正常工作状态下,系统工作于六开关逆变器模式,在故障状态下,系统工作于四开关运行模式,输出的电压矢量幅值减小。而且,不同故障下的逆变器输出电压空间矢量轨迹是不同的,它们的轨迹空间分布和前文中的理论分析一致。图4(b)为逆变器C相桥臂在0.2 s时发生故障时的系统瞬态响应。在0~0.2 s,系统工作在常规的六开关逆变器供电模式,在0.2 s以后,逆变器C相桥臂开关管发生故障,整个C相桥臂退出运行。此时,C相绕组连接至劈相电容中点,A和B相桥臂开关联合两个劈相电容进入四开关容错工作模式。逆变器输出电压幅值下降,但电机转速保持不变。系统仍然保持正常运行。图4(c)、图4(d)为逆变器分别为A相和B相桥臂在0.2 s时发生故障时的系统电流瞬态响应。

表3 永磁同步电动机参数表
由图4可以知道,所提出的容错逆变器驱动的PMSM电机策略,可以有效实现PMSM电流控制策略中逆变器开关故障状态下的可持续运行。仿真结果符合理论分析。当系统进入容错模式下运行后,系统仅由控制非故障相的两相电流来实现持续控制,由于逆变器发出的电压控制矢量峰值降为原来的一半,逆变器的输出功率和电机所能实现的最高转速都会将降低。虽然系统的性能指标降低,但是保证了系统的可持续运行能力,这对系统性能要求不高的电机控制应用领域,逆变器容错控制策略仍然具有较大的经济价值和应用前景。

图4 所提出控制方案仿真结果
4 结 语
本文研究了一种容错型逆变器并将该逆变器应用于永磁同步电动机矢量控制中。该策略的提出可以有效解决实际应用中需要保证电机控制系统在逆变器发生故障时的持续性运行的问题。其中,分析了容错逆变器不同容错方式下的三相四开关逆变器电压矢量特性,并根据永磁同步电动机三相电流的控制特性提出了容错逆变器下的永磁同步电动机控制系统方案。通过对所提出种策略进行的仿真研究,确认了该方案具有优良的静态和动态特性,是一种具有实用前景的电机控制系统容错策略。
[1] Ede J D,Atallah K,Wang J,et al.Effect of optimal torque control on rotor loss of fault-tolerant permanent-magnet brushless machines[J].IEEE Trans.On magnetics,2002,38(5):3291 -3293.
[2] Bianchi N,Bolognani S,Zigliotto M,et al.Innovative remedial strategies for inverter faults in IPM synchronous motor drives[J].IEEE Trans.Energy Conversion,2003,18(2):306 -312.
[3] Bolognani S,Zordan M,Zigliotto M.Experimental fault- tolerant control of a PMSM drive[J].IEEE Trans.Ind.Eletron,2000,47(5):1134-1141.
[4] Welchko B A,Lipo T A,Jahns T M,et al.Fault tolerant three -phase AC motor drive topologies:a comparison of features,cost,and limitations[J].IEEE Trans.Power Electron,2004,19(4):1108-1116.
[5] 林海,严卫生,李宏.无刷直流电机驱动控制容错方案研究[J].西安交通大学学报,2009,9(2):53 -57.
[6] Zhang Lanhong,HU Yuwen,Huang Wenxin.Research on direct torque control of tolerant type four switch three phase converter induction generation system[J].Proceedings of the CSEE,2005,25(18):140-145.