作战指挥系统无源协同定位的一种设计与实现
2012-07-19王剑波丁文优
王剑波 丁文优
1华中科技大学 控制科学与工程系,湖北 武汉430074 2中国舰船研究设计中心,湖北 武汉430064
作战指挥系统无源协同定位的一种设计与实现
王剑波1,2丁文优2
1华中科技大学 控制科学与工程系,湖北 武汉430074 2中国舰船研究设计中心,湖北 武汉430064
无源定位是舰艇作战指挥系统获取战场态势的有效途径。现有的无源定位技术均局限于单平台无源机动定位或同型无源探测设备单机单控多平台协同定位,缺乏系统顶层设计理念。提出一种针对舰艇作战指挥系统无源协同定位功能的集成设计和实现方法,通过系统功能部署设计、明确系统配置组成、信息交互需求分析3个步骤,实现了多平台同型无源探测设备从系统层面开展协同定位的能力。以多平台同型无源探测设备的协同定位为例开展模拟试验,验证了该设计的有效性和可行性。研究表明,所提出的方法较单机单控协同定位方式定位收敛时间缩短,定位精度有所提高,理论上还可以支持不同舰艇之间异型无源探测设备的协同定位。
无源定位;测向交叉定位;作战指挥系统;顶层设计
1 引言
在现代海战场中,保持无线电静默是舰艇根据作战需要所采取的战术隐蔽措施。在舰艇保持无线电静默过程中,无源定位是舰艇作战指挥系统获取战场态势的有效途径。无源定位技术通常指的是工作平台不向外辐射电磁波,通过接收目标电子设备发射的电磁信号测定辐射源位置的一项技术。通过被动接收声波、红外特征信号等测定辐射源位置也属于无源定位技术范畴[1-2]。无源定位具有一定的超视距探测功能,可以先敌发现,从而先敌攻击、争取主动。而且,由于无源探测和定位系统(设备)本身不辐射射频能量,因此不易被敌方电子侦察系统探测到,隐蔽性好,具有极强的雷达反侦察、反对抗、反ARM(反辐射导弹)攻击、反隐身等能力[3]。因此,舰艇作战指挥系统无源定位技术在现代海战中具有很大的军事应用价值。
目前,无源定位技术主要有测向交叉定位、时差无源定位[4]、多普勒频率定位[5]、测相位差变化率定位、方位-到达时间联合定位、方位-频率联合定位、“平面外”多路径反射信号无源定位[6]等。其中,时差定位和频差定位技术在工程实现方面面临若干技术难题和局限性。在国外现役装备中,采用测相位差变化率定位的系统较多,典型的有捷克的“塔玛拉改进型”薇拉(VERA)系统、俄罗斯的VEG-A85V6-A 3坐标无源定位系统、美国的AN/TRQ-99移动式无源定位系统、乌克兰的“铠甲”空情监视系统等[7]。而测向交叉定位是一类经典的定位技术,其基本原理是通过高度精确的测向设备在2个以上的观测点对目标进行测向,各个测向线的交叉点就是目标的位置,该项技术在现代海战中同样也得到了广泛的应用。
然而,现有的无源定位技术均局限于单平台无源机动定位或多平台同型无源探测设备协同定位,均属于单机单控模式,缺乏系统顶层设计理念。单平台无源机动定位需要用于定位的舰艇严格按照规定的航路和运动参数进行航行机动,限制因素较多,并且定位解算收敛时间长、定位精度低、适用性较差。多平台同型无源探测设备协同定位虽然实现了利用多艘舰艇进行协同定位,但该技术仍处于舰艇间设备级的协同。事实上,基于无源交叉测向定位原理解决多平台同型无源探测设备协同定位,还需要导航定位、通信、时间对准等多方面的信息保障,显然较单设备而言,舰艇作战指挥系统能够更好地提供这些保障。
本文从系统总体的角度开展无源定位设计和实现方法研究,该方法不仅可以从系统级协同的层面实现多平台同型无源探测设备的协同,理论上还可实现舰艇间异型无源探测设备的协同定位功能。利用舰艇作战指挥系统装备的被动雷达、电子侦察设备、被动声呐、红外设备等具有无源探测能力的设备,通过自顶向下地开展舰艇作战指挥系统无源协同定位集成设计,可进一步拓展作战指挥系统功能和作战适应性,为作战指挥系统研制提供技术支撑。
2 功能设计与实现
舰艇作战指挥系统无源协同定位集成功能设计,按照以下3个步骤展开:
1)系统功能部署设计。舰艇作战指挥系统无源协同定位功能由1艘定位舰和1艘或多艘辅助定位舰协同完成,各舰指控系统通过无源探测设备采用测向交叉定位获取目标的测向信息,定位舰指控系统通过战术数据链无线信道与辅助定位舰互相发送协同控制命令和目标数据信息,指控系统通过协同定位算法软件模块计算得出目标的位置信息,产生目标综合态势。
2)明确系统配置组成。由系统功能分解部署,进一步明确作战指挥系统在每艘舰艇平台上无源协同功能分解及配置组成需求,如表1所示。

表1 作战指挥系统无源协同定位功能分解及配置组成需求Tab.1 Function decomposition and demand for configuration on combat command system passive cooperative location
3)信息交互需求分析。在明确作战指挥系统配置组成需求后,根据各配置组成系统(设备)在作战指挥系统无源协同定位功能部署,确定作战指挥系统各配置组成系统 (设备)的信息交互需求。在作战指挥系统进行无源探测时,无源探测设备将探测到的原始目标角航迹数据输出至指控系统,指控系统将本舰无源探测设备发送的原始目标角航迹数据、经通信系统接收的协同舰待协同定位信息(包括无源探测设备原始目标角航迹、平台导航信息、无源探测设备操控参数、协同就位点位置参数等信息)进行定位解算和融合处理,输出融合目标航迹数据,生成综合目标态势。导航系统、时间基准设备、通信系统、网络设备提供作战指挥系统运行所必需的信息支援保障,其中导航系统、时间基准设备为指控系统、无源探测设备分别提供本舰导航信息(包括艏向角、舰姿、舰位、航速等信息)、时间信息,通信系统保障本舰与协同舰之间相关业务信息的传输,网络设备保障作战指挥系统内各配置组成系统(设备)之间信息的传输、交换和分发。作战指挥系统无源协同定位信息交换需求如表2所示。
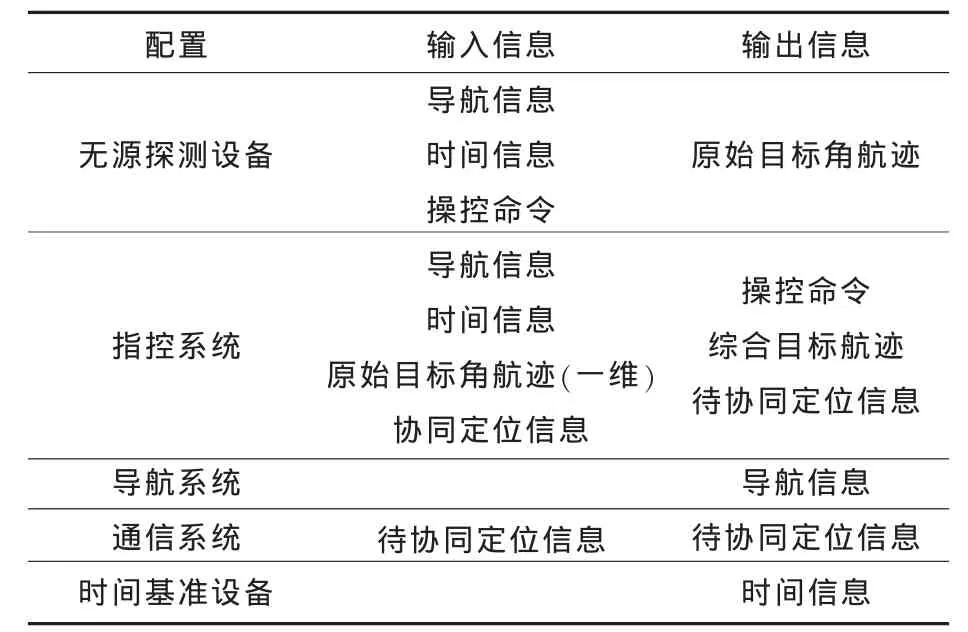
表2 作战指挥系统无源协同定位信息交换需求Tab.2 Requirements of message exchange on combat command system passive cooperative location
3 流程设计与实现
在完成系统无源协同定位功能设计后,开展作战指挥系统无源协同定位信息流程设计。
遂行无源协同定位的舰艇可互为协同舰,一般约定以发起协同定位指令的舰艇担任主舰,协同舰作为从舰。下面以双舰作战指挥系统无源协同定位为例,来说明作战指挥系统无源协同定位的流程,如图1所示。
主舰的无源探测设备被动探测发现目标后产生原始目标角航迹,指控系统将无源探测设备输出的原始目标角航迹数据、导航信息、无源探测操控参数、协同就位点位置参数等信息组合成待协同定位信息后由通信系统向从舰发送。
从舰的通信系统在接收到主舰发送的协同定位信息后转发至从舰指控系统,从舰指控系统接收并显示相关待协同定位信息。从舰作战人员将根据待协同定位信息提示完成从舰机动,并操作从舰无源探测设备进行搜索。从舰到达指定位置并按要求搜索到同一目标后将目标角航迹数据上报至从舰指控系统,同样也形成待协同定位信息。从舰指控系统将根据主、从舰的待协同定位信息计算出待定位目标的距离和方位。之后,作战指挥系统按正常情报流程进行处理。
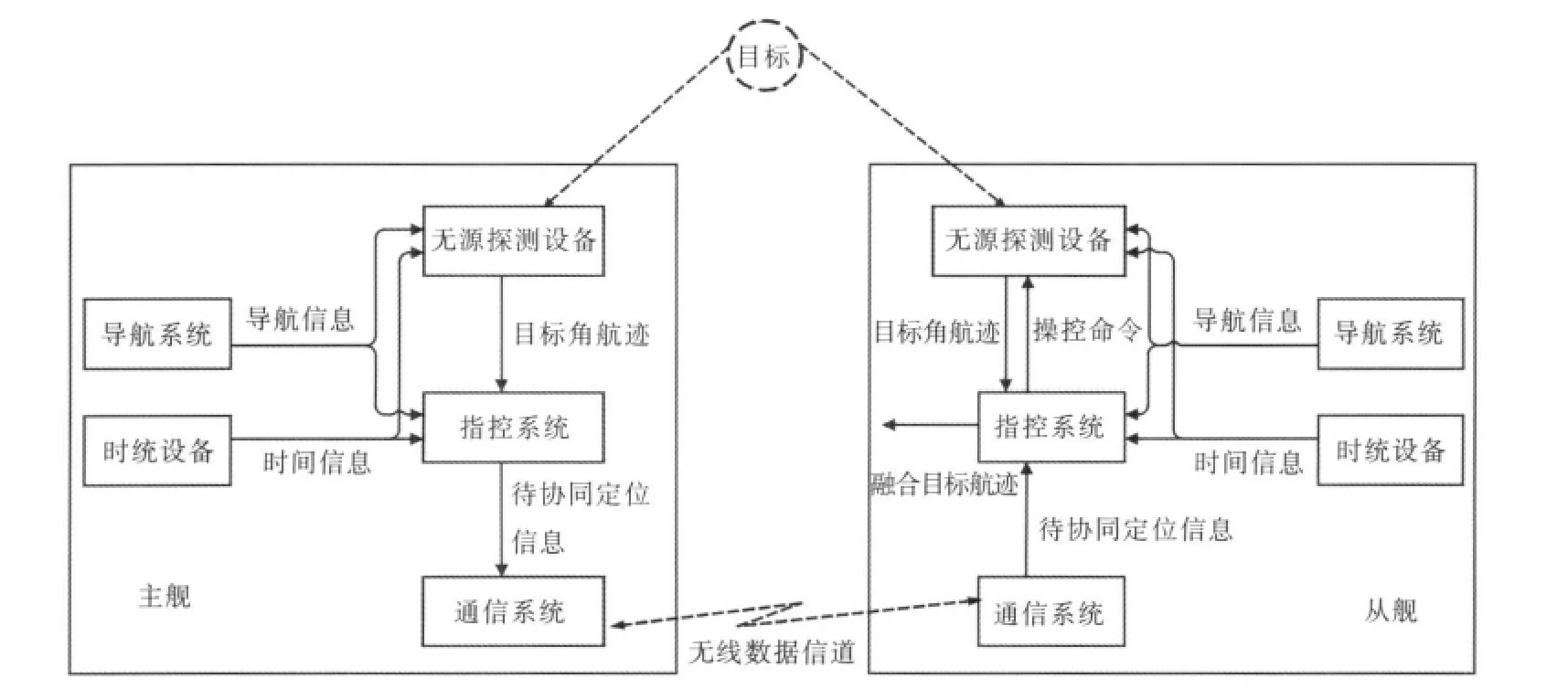
图1 作战指挥系统双舰无源协同定位功能框图Fig.1 Configuration scheme of combat command system twi-ship passive cooperative location
4 模拟试验设计
以多平台同型无源探测设备的协同定位为例,开展在模拟试验环境下的作战指挥系统双舰无源协同定位试验,以验证本文提出的作战指挥系统无源定位设计和实现方法的有效性和可行性。
试验方案设计了3艘水面舰艇进行试验,分别担负协同任务的主舰、从舰和目标舰。在作战指挥系统模拟环境中,模拟主舰和从舰的雷达设备、指控系统、通信系统、导航系统等系统(设备)正常工作,目标舰雷达设备开机发射射频。
模拟试验设定在5级海况下,3艘舰艇呈“品”字排列,相互之间距离约10 km,试验开始后参试舰艇以18 kn航速同向直线运动,如图2所示。
作战指挥系统模拟试验环境对3艘舰艇的位置进行实时差分动态测量,经计算处理后得出3者的相对位置数据,该相对位置数据作为试验的约定真值。将同时段的作战指挥系统协同定位融合目标数据与约定真值按同时刻计算误差。
5 试验结果分析与讨论
影响作战指挥系统无源协同定位误差的主要因素有雷达机械零位与电气零位误差、数据传输和处理时延、舰位误差、舰姿误差、航速误差、时间误差、协同舰航路与目标的位置关系[8]等。
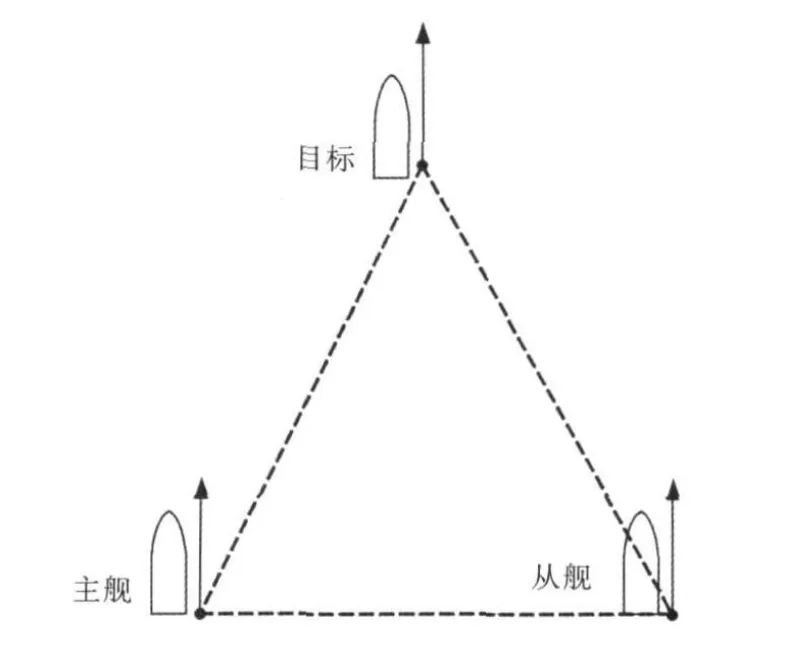
图2 作战指挥系统双舰无源协同定位模拟试验航路Fig.2 Simulation track of combat command system twi-ship passive cooperative location
图3给出了1次作战指挥系统双舰协同定位试验中的目标距离和方位误差分布图,该试验过程持续时间5.7 min,作战指挥系统目标航迹数据输出连续,融合目标航迹数据录取采样345帧,约定真值数据采样1帧/s。通过试验数据分析,数据收敛到稳定耗时大约2 min,与以往采用的单机单控模式定位相比,双舰协同定位的数据收敛时间缩短 1/3~1/2。经统计计算,目标距离误差均方根值为 1.71 m,目标方位误差均方根为 0.57°,定位精度有所提高。
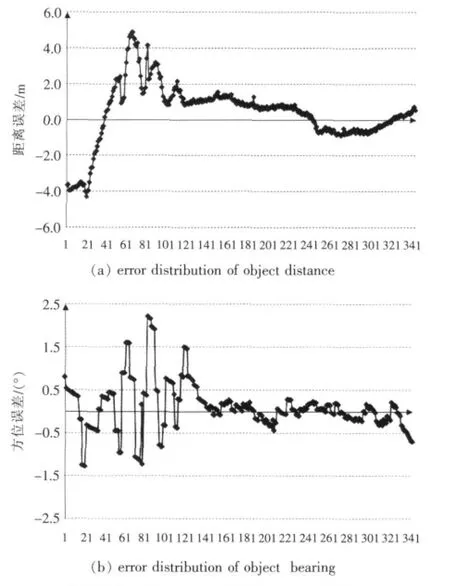
图3 作战指挥系统双舰协同定位模拟试验误差分布图Fig.3 Smulation error distribution of combat command system twi-ship passive cooperative location
6 结 论
本文从作战指挥系统顶层的角度,基于无源交叉测向定位原理,提出了一种支持不同舰艇之间同型无源探测设备的协同定位的舰艇作战指挥系统无源协同定位集成设计和实现方案,并通过模拟试验进行了验证。试验结果表明,该方法切实可行,较以往所采用的单机单控模式相比收敛时间缩短。并且该方法在理论上还可以实现不同舰艇之间异型无源探测设备的协同定位功能,后期将继续开展不同舰艇之间异型无源探测设备的协同定位模拟试验研究。
[1]ALBERTS D S, GARSTKA J J, STEIN F P.Network Centric Warfare:Developing and Leveraging Information Superiority[M].2nd Ed.USA:CCRP,1999.
[2]戴自立.现代舰载作战系统[M].北京:国防工业出版社,1999.
[3]解家宝,武传华,付仕平.无源定位中时延估计方法研究[J].舰船电子对抗,2008,31(6):26-29.
XIE J B,WU C H,FU S P.Research on the Time-delay Estimation method in passive location[J].Shipboard Electronic Countermeasure,2008,31(6):26-29.
[4]郁春来,韩彦明,万方,等.一种脉冲群间多普勒频率变化率的估计算法[J].现代雷达,2008,30(9):40-43.
YU C L,HAN Y M,WAN F,et al.An estimation algorithm for doppler frequency rate-of-change between pulse groups[J].Modern Radar,2008,30(9):40-43.
[5]贺静波,黄高明,彭复员.一种改进粒子滤波的双站无源定位跟踪算法[J].电子信息对抗技术,2007,22(6):19-22,49.
HE J B,HUANG G M,PENG F Y.An improvement particle filtering algorithm for passive location tracking [J].Electronic Information Warfare Technology,2007,22(6):19-22,49.
[6]黄振中,孙志波.机载传感器的最新发展[J].国际电子战,2007(6):25-28.
HUANG Z Z, SUN Z B.New development in airborne sensor [J].International Electronic Warfare,2007(6):25-28.
[7]刘钰.无源定位方法及精度分析[D].西安:西北工业大学,2005.
LIU Y.Passive location method and its precision analysis[D].Xi’an: Northwestern Polytechnical University,2005.
[8]陶新.无源定位方法与性能分析[D].成都:电子科技大学,2002.
TAO X.Passive location method and its performance analysis[D].Chengdu: University of Electronic Science and Technology of China,2002.
An Approach to Passive Cooperative Location for Combat Command System
Wang Jian-bo1,2Ding Wen-you2
1 Department of Control Science and Engineering, Huazhong University of Science and Technology,Wuhan 430074,China 2 China Ship Development and Design Center, Wuhan 430064,China
Passive location provides shipboard combat command system with the capability of situational awareness in an efficient way,but existing technology is constrained to single platform based mobile location or multiple platform cooperative location by single unit and single control among the same type of passive detection equipment, primarily due to lack of top-level design considerations.This paper presented a function integration and design approach to passive cooperative location for shipboard combat command system.The process of cooperative location among the same type of passive detection equipment in system-level is as follows: system function deployment, system configuration identification and requirement analysis of information interaction.Simulation tests showed the validity and feasibility of the proposed approach.Compared with the single-unit and single-control mode, the method proposed improves convergence time and location precision,and also supports cooperative location among the different types of passive detection equipment belongs to different ships.
passive location; dual direction finding radar cross-positioning; combat command system;top-level design
U665.2
A
1673-3185(2012)02-75-04
10.3969/j.issn.1673-3185.2012.02.014
2011-04-28
国家部委基金资助项目(×××3415009)
王剑波(1978-),男,博士研究生,工程师。研究方向:舰船电子信息系统。E-mail:jbwcn@hotmail.com
丁文优(1981-),女,硕士,工程师。研究方向:舰船电子信息系统。
王剑波。
[责任编辑:喻 菁]
