基于Min-Max方法和移动轨迹融合的车辆无线定位算法*
2012-07-19王江锋闫学东邵春福魏丽英
王江锋,闫学东,邵春福,魏丽英
(北京交通大学,城市交通复杂系统理论与技术教育部重点实验室,北京 100044)
前言
作为ITS重要研究领域的车载自组网(vehicular ad-hoc networks,VANets)日益成为研究热点,它是专门为车辆间通信而设计的自组织网络,使驾驶员能在超视距范围内获得相邻车辆的行驶状况信息(如车速、方向、位置等)和实时路况信息[1]。其中,车辆移动节点的无线自主定位算法是VANets应用前须研究的一项关键技术。
国内外研究人员通过借鉴传感器网络的定位技术,对车辆移动节点的无线定位算法进行了相关研究。文献[2]~文献[5]中对常用的Ad Hoc网络定位方法进行了分析,给出了详细的定位原理和特点,并对算法的性能进行了定性评价。文献[6]和文献[7]中分别利用 RFID、地图匹配等技术提出了VANets环境下的无线定位方法。文献[8]中将到达时间差与质心定位相结合,提出一种基于加权处理的质心混合定位算法。这些基于无线通信技术的定位方法,由于定位过程中无线信号易受外界环境干扰,出现定位突变的问题,使定位误差偏高。同时这些方法相对比较复杂,须经过实验验证,以测试其实用性和可靠性。本文中从实际应用角度,在总结Min-Max模型的基础上,融合车辆节点移动轨迹,提出一种适用于车辆的无线定位算法;通过实验并与其他多种无线定位算法对比,对设计的融合无线定位算法进行了定位精度和误差分析。
1 车辆无线定位方法分类
VANets环境下车辆无线定位一般分为节点自主定位和外部目标定位。前者根据已知位置的车辆节点(锚节点)信息,按照某种定位机制确定未知车辆移动节点的位置;后者依靠外部目标提供的信息计算得到车辆节点的位置信息。常用的车辆节点无线定位算法的分类如图1所示。
文中主要讨论车辆节点的自主定位算法,其分为基于距离和非距离两种定位算法。基于距离定位算法通过测量车辆节点间距离或角度信息来计算车辆节点位置。其定位性能对比分析如表1所示。
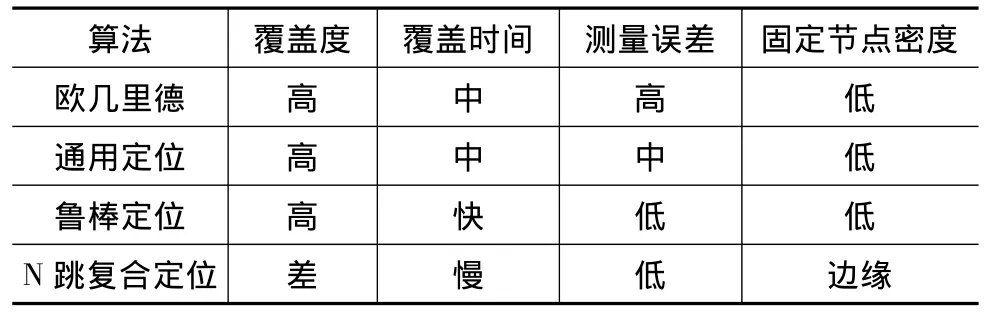
表1 常用基于距离定位算法的性能比较
非距离定位算法通过数理方法估计节点间的距离或包含移动节点的可能区域,来确定移动节点的位置。其定位性能对比分析如表2所示。
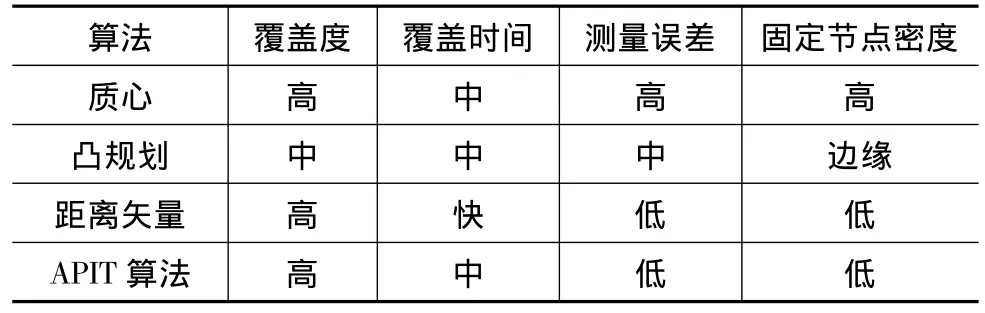
表2 常用非距离定位算法的性能比较
2 融合定位算法设计
利用Min-Max方法对车辆移动节点进行近似定位,同时结合车辆节点移动轨迹获得其短时位置信息,将两种定位信息进行融合,得到最终车辆节点的位置。此算法既可有效避免无线定位信号受外界环境干扰而出现定位突变情况,又可改善利用运行轨迹进行长时定位所产生的误差累计效应。
Min-Max方法:对于每一个固定节点Bi(i=1,2,…,n),利用其位置(xi,yi)信息和与移动节点 S之间近似距离di,建立一个边界方格,确定多个边界方格的交叉区域,将交叉区域方格中心S'点近似为S点。图2给出了利用3个固定节点进行移动节点定位的示意图。
图2中固定节点Bi(i=1,2,3)的边界方格为
由3个固定节点产生的多个边界方格的交叉区域为
时刻t交叉区域中心S'的坐标近似作为车辆移动节点 S的坐标(xst,yst)。
节点间距离di采用“距离-损耗”模型来获得:
式中:pi为固定 Si(i=1,2,3,…,n)与移动节点 S 间的接收信号强度,dB;d0为参考距离,m;p0为距离为d0时的接收信号强度,dB;di为S与 Si(i=1,2,3)间距离,m;ζ是遮蔽因子,其与传播距离无关,服从均值为0、方差为 σdB的正态随机分布,σdB∈[4,10];n是路径损耗系数即环境因子,n∈[2,6]。
移动轨迹方法:车辆移动节点S在移动过程中的轨迹方程为
式中:v(t)和d(t)为t时刻移动节点的速度和方向;α为随机转弯参数和为t→∞时的平均速度和方向;v(ξ)和d(ξ)为随机高斯变量。
由移动轨迹方程实时获取车辆移动节点t时刻的坐标为
利用上述两种方法分别得到车辆移动节点的位置信息,然后进行融合,得到移动节点的最终位置(xfs,yfs),计算公式为
式中e为可接受的坐标误差,取值为0.01m。
车辆移动节点位置坐标的定位误差为
3 实验验证
3.1 实验方案设计
实验硬件系统主要负责信息的传输和采集,包括主控、信息采集、电源、无线通信、执行与数据处理和GPS等模块,如图3所示。
实验系统软件主要实现信息融合和车辆状态信息的显示,包括车辆的行驶方向、位置和速度等信息,如图4所示。
为了减少外界环境的干扰,选择一空旷地点作为实验区域,实验目标包括1个移动节点S和4个固定节点 Bi(i=1,2,3,4)。
为验证算法的有效性,整个实验区域见图5。对于车辆移动节点,在每一个位置点连续采集40个移动节点的位置数据,通过求平均值获得每个位置点的一组实验样本数据(xi,yi,LQIi)(i=1,2,3,4),其中LQI为信号连接质量,用于表征信号强度。移动节点每移动一个单位步长,获得一个新位置点,按照上面的方法,连续获得实验所需的样本数据。
通过采集的样本数据(xi,yi,LQIi)和标定的“距离-损耗”模型,计算得到移动节点和固定节点之间的距离,再利用设计的融合定位算法可以得到移动节点的位置。
3.2 “距离-损耗”模型标定
常用表征信号强度的参数有接收信号强度pRSSI和信号连接质量pLQI,文中使用JN5139zigbee模块提供的pLQI参数表征信号的强度。
在定位实验前,须利用样本数据对(d,LQI)标定“距离-损耗”模型。通过调整移动节点(x,y)和固定节点之间的距离d,采集相应的LQI值。模型标定结果如图6所示。
根据实验标定结果,用于进行定位实验的“距离-损耗”模型为
3.3 实验结果分析
通过设计的实验系统,利用Min-Max方法和移动轨迹方法分别获取车辆移动节点的位置信息,最后利用设计的融合定位算法给出最终的车辆位置信息。融合定位算法给出的车辆位置坐标(xfs,yfs)实际值和实验值之间的关系如图7所示。
从图7可看出,由Min-Max方法和移动轨迹方法给出的定位坐标值都出现了明显的波动性,而融合算法给出的坐标值波动性相对较小,坐标实验值与坐标实际值之间误差始终处于一个相对较小的变化范围,使车辆移动节点的定位精度相对较高。
为了进一步验证融合算法的定位误差变化情况,利用式(8)计算实验所采集样本数据的定位误差,车辆移动节点定位误差随坐标(xfs,yfs)实时变化的过程如图8所示。
从图8可见,定位误差分布呈现“U”字型趋势。说明在进行VANets网络环境下车辆移动节点定位时,当移动节点位于固定节点中间区域时,其定位精度相对较高。当位于实验区域边缘部分时,由于实验过程中人员和车辆等对信号干扰性强,使定位精度较差。在进行车辆移动节点定位时,尽量将固定车辆节点布置到未知车辆移动节点周围,使未知节点处于中心区域,提高其定位精度。
为进行定位性能的比较分析,选择文献[9]中给出的三边形和四边形定位算法作为对照,验证融合算法的有效性。表3给出了3种定位算法在不同定位精度下的观测样本数据量的比值关系。对于三边形定位算法,定位误差小于1m、2m和3m的观测样本量所占比例分别为19.0%、62.0%和91.1%;对于四边形定位算法,相应取值分别为21.5%、70.6%,和93.0%;而对于融合算法,相应取值分别为45.3%、90.1%,和96.5%。通过比较分析,融合定位算法的定位精度要高于其它两种定位算法。

表3 不同定位精度水平下观测值比例
4 结论
利用Min-Max方法,融合车辆移动节点的轨迹,提出了一种融合定位算法。通过实验对比,对融合定位算法进行了定位性能分析,结果显示,所设计的融合定位算法的定位精度明显高于其它两种算法,并且超过90%的样本数据定位误差小于2m。
[1]Wang Jiangfeng,Yan Xuedong,Shao Chunfu.Design of Multi-vehicle Ad Hoc Experiment System Based on VANets[J].SCIENCE CHINA:Technological Sciences,2011,54(4):1011 -1016.
[2]Koen Langendoen,Niels Reijers.Distributed Localization in Wireless Sensor Networks:a Quantitative Comparison[J].Computer Networks,2003,43:499 -518.
[3]Azzedine Boukerche,Oliveira Horacio A B F.Vehicular Ad Hoc Networks:A New Challenge for Localization-Based Systems[J].Computer Communications,2008,31(12):2838 -2849.
[4]王闽申,王忠.无线自组网节点定位算法综述[J].通信技术,2009,42(10):213 -215.
[5]胡可刚,王树勋,刘立宏.移动通信中的无线定位技术[J].吉林大学学报(信息科学版),2005,23(4):378 -384.
[6]Wei Cheng,Cheng Xiuzhen,Zhao Wendy W.On the Design and Deployment of RFID Assisted Navigation Systems for VANET[R].USA Washington:The George Washington University,2010.
[7]Efatmaneshnik M,Tabatabaei A T,Alam N.Cooperative Positioning of Vehicular Networks with a Map-matching Enabled Extended Kalman Filter[C].2010 IEEE 72nd Vehicular Technology Conference,Canada,2010:1 -6.
[8]刘影,钱志鸿,王雪.基于到达时间差的无线传感器网络质心定位算法[J].吉林大学学报(工学版),2010,40(1):245-249.
[9]Wang Jiangfeng,Yan Xuedong,Shao Chunfu.Experimental Analysis of Wireless Positioning Accuracy for Vehicular Ad Hoc Network Technology Application[C].TRB 91st Annual Meeting,Washington DC,USA,2012:1-17.
