基于地磁的智能路口交通灯的设计
2012-07-18邵根富杨成忠
张 君,邵根富,杨成忠,黄 林
(杭州电子科技大学自动化学院,浙江杭州310018)
0 引言
目前国内道路的十字路口红绿灯,都是通过人工经验设定时间来管理,缺乏管理系统自我的智能调度[1]。国内外也有人在研究通过视频监控,超声波,地感等等途径来获取车辆道路信息,但这些都存在着不同的问题,视频监控没法在大雾天气采集数据,超声波对检测环境要求很高,地感线圈容易被压坏等等[2]。本文设计的系统通过地磁检测终端检测交通指标不受上述条件限制,采用实时的网络传输到达高层的处理器,并通过高层运算调度来达到管理系统自身的实时智能调度。
1 系统架构
1.1 系统整体架构
本套智能系统主要有检测终端、道路网关、路口路由和以及总服务器组成,如图1所示。
检测终端主要负责各自车道上交通指标的检测,然后通过485总线将交通信息传递给车道网关,网关将整条车道信息进行联网整理,然后将处理好的数据通过CAN总线发送给路口路由器,不同路口的路由将各自的信息打包,通过光纤传递给总服务器。

图1 智能系统总架构
1.2 系统整体布局
检测传感器按照区域进行控制,十字路口分成4个区域。每个区域的传感器通过分区地磁车辆检测器进行信号集中处理,分区地磁车辆检测器与传感器之间通过电源线与网络总线连接,电源供电为直流,网络采用2线制现场总线,如图2所示。
2 系统平台搭建
2.1 检测终端模块的设计
2.1.1 检测原理
地球表面存在着约0.6Gs的磁场。车辆可以看成一个大的铁磁物质,当车辆进入磁场时,可以看成是一个磁偶极子模型,如图3所示:

图2 检测系统布局

图3 车辆周围磁场的磁偶极子模型
图3中,将车辆看成一对点电荷,相距2d,传感器位于原点,设点电荷相对不变,在原点场强为:
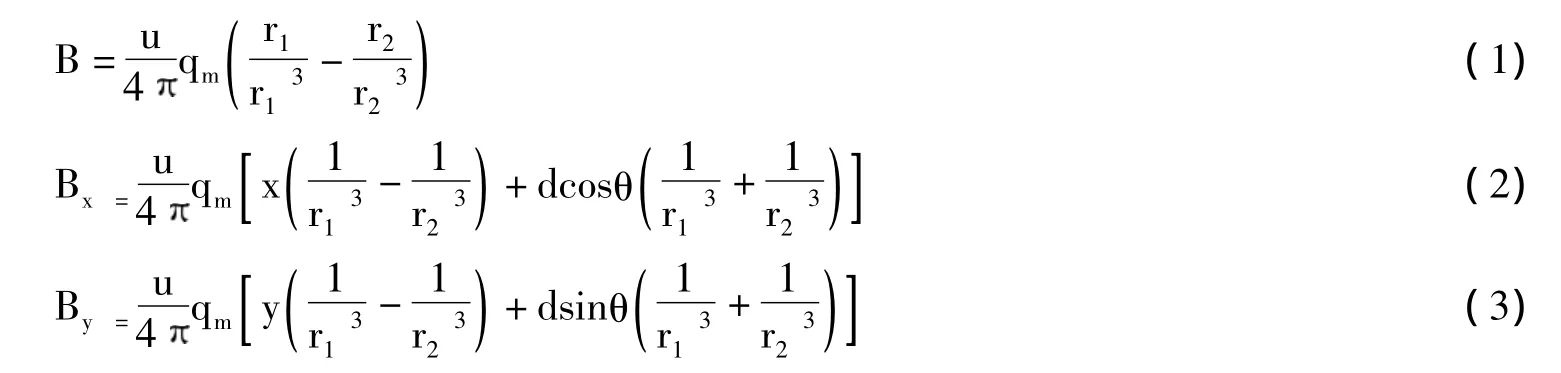
偶极子在原点处场强会随位置的改变而有规律的变化,根据此原理,可通过检测车辆行驶时的磁感应强度来获得交通流信息。
2.1.2 检测终端设计
由于采样所得信号较小,所以本文设计了一个前置放大电路,放大电路采用的是精密、高输入阻抗的仪表放大器AD620构成的差动放大器,如图4所示:
检测模块通过正负15V的直流供电,而传感器是使用5V直流供电,检测的信号量通过一个运放将信号放大,然后传入MCU的AD1。
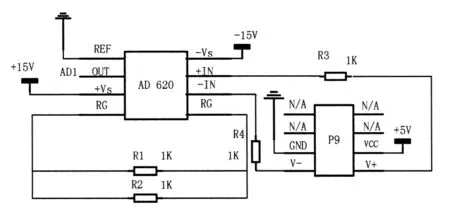
图4 检测终端原理图
2.2 车道网关设计
车道网关需要负责一个出车道3排和右边入车道1排共4排检测终端的数据接收、数字滤波、融合并发送给路口路由器的工作,选用的是基于ARM Cortex-M3内核的STM32处理器。模块硬件框图如图5所示:

图5 道路网关模块框图
2.3 路口路由设计
路口路由需要接收整个路口共4个网关的数据,对数据进行融合处理,通过光纤传给交通控制中心。路由器需要解析控制中心的调度指令,对路口的红绿灯进行控制,同时也可根据获取的信息自主选择运行不同的时间分配方案。模块硬件框图如图6所示:

图6 路由器模块框图
2.4 软件设计
下位机软件主要负责数据的采集与传送,系统在开始时传感器进行自动复位,然后对检测环境进行自适应,接着一直检测周围磁场状况,并通过计数器计数,当计数器的值到达20时,发送数据,并将计数器清零。检测终端软件流程如图7所示:

图7 软件流程图
3 结束语
基于地磁的车检对环境的依赖小,可以通过与视频类监测系统联网,以获取更加准确的交通状态信息,从而在智能交通上提供更加准确可靠的数据支持。
[1] Baillieul B J,Antsaklis P J.Research on Intelligent Transportation Systems in Taiwan[C].Kunming:Proceedings Of the 27th Chinese Control Conference,2007:9 -28.
[2] 高飞燕.基于单片机的超声波测距系统的设计[M].北京:人民邮电出版社,2005:128-129.
[3] 刘军.例说STM32[M].北京:北京航空航天大学出版社,2011:1-28.
[4] Neil White.Intelligent Sensors[M].Shanghai:Sensor Review,1997:97 -98.
[5] 徐科军.传感器与检测技术[M].北京:电子工业出版社,2004:2-32.
[6] 王泽民,胡波.坡莫合金磁阻传感器的应用探讨[M].北京:科学出版社,2005:47-49.
