GPS/INS组合导航系统时间同步方法综述①
2012-07-18孙付平李海峰
刘 帅,孙付平,陈 坡,李海峰
(信息工程大学测绘学院,河南 郑州450052)
0 引 言
GPS具有定位精度高、误差不随时间积累等优点,而且,用载波相位观测值时,其定位精度可以达到厘米级,但是,GPS也存在着信号容易受到遮挡或干扰、数据更新率低、缺少姿态信息输出等缺点;相比较而言,惯性导航系统(INS)是一种完全自主的导航系统,其拥有高数据更新率,并具备姿态信息输出,但是由于陀螺误差漂移的存在,即使高精度的INS也面临误差随着导航时间延长而不断累积的问题。由于GPS和INS之间存在良好的互补特性,GPS和INS的组合将能克服各自的缺点、体现组合优势。
GPS和INS组合导航包含各自导航信息的融合,而导航信息融合的重要前提是不同导航传感器所获取的导航信息在空间和时间上统一。导航传感器的空间统一是指测量出GPS和INS之间的坐标差值,并在导航信息的融合时加以转换改正,相对较易实现。而导航传感器的时间统一或者说时间同步则相对复杂。若不考虑GPS和INS这两种导航传感器间的时间偏差,将不同时间点上所获取的导航信息进行融合会给滤波结果带来误差,甚至产生错误的导航结果。因此,时间同步是GPS/INS组合导航系统设计的基础。鉴于时间同步对组合导航的重要性,许多学者对GPS/INS组合导航系统时间延迟的影响、时间同步的方法进行了研究。根据现有的相关研究资料,着重分析了时间不同步产生的原因,归纳了组合导航时间同步的实现思路,并阐述了现今典型的时间同步方法。
1 时间异步原因
1)时间起点和基准不一致。GPS和INS是两个独立的系统,对应着不同的时间系统,各自的时间起点和基准均不一致。GPS接收机时间对应于GPS时,其起点是1980年1月6日零时;INS使用其内部控制电路中的计时器,通常每次INS开机后该计时器从零开始计时。GPS以原子时秒长作为自身秒长,能够保证时间间隔的高稳定性;INS是依靠内部晶振频率作为计时基准,相对GPS时钟其频率并不稳定,易发生漂移。由上可知,INS和GPS的时间起点不一致,基准也不同。
2)数据采样点不一致。GPS接收机和INS的采样率或者说数据更新率是不同的,INS能够达到200Hz或更高的数据更新率;GPS接收机的数据更新率通常为1Hz.GPS接收机能够严格在整秒进行测量采样,但INS并不能保证恰好也在整秒时刻进行测量采样,这会导致当把卡尔曼滤波时刻选择在GPS整秒时刻时,此时虽有GPS测量值,但由于采样点的差异未必有INS测量值。
3)电路时延。GPS导航信息和INS数据存在着输出时延,具体体现在:GPS接收机和INS的内部时延(测量、采样、模数转换等产生的时延)、GPS接收机和INS的导航信息传输到组合导航信息融合滤波器过程中的传输时延(串口时延等)、导航信息处理过程中产生的时延、秒脉冲信号的不稳定性及时延。
2 时间同步方法分析
在设计组合导航系统时应根据组合导航系统的整体精度需求,确定时间同步的精度需求,继而确定时间同步方法,以实现设计成本和系统精度的协调。因此,需要明确时间不同步对组合导航性能的影响量级,此方面内容具体可以参考文献[1]、[2]、[3]、[4]、[11]。理想的时间同步实现方法是让GPS与INS使用同一个晶振来进行数据采集[6],但这很难实现,因为需要同时具备GPS和INS的底层开发能力。
通常的时间同步方法借助于GPS接收机输出的秒脉冲信号(1PPS)。GPS接收机输出的1PPS的上升沿与GPS时的偏差通常小于1μs,对于授时型接收机其偏差会小于100ns.GPS接收机严格在1PPS的上升沿进行一次伪距、伪距率、载波相位等测量,可以看出1PPS是代表GPS接收机测量时刻的一个稳定的信号,因此,可以借助GPS接收机输出的1PPS作为参考来实现时间同步。但考虑到GPS接收机输出的1PPS仅是一个能够代表GPS测量时刻的秒脉冲信号,并不包含绝对的时间信息,因此,要达到绝对的时间同步还需要利用GPS接收机输出的NEMA0183格式导航数据或是二进制格式导航数据所包含的绝对时间信息。此外还需要从INS提供的接口上考虑时间同步方法,如果INS不提供GPS接收机信号或数据的输入,则需要设计公用的时间同步模块。
3 典型时间同步方法
现有的典型组合导航时间同步方法可将其分为三类:GPS接收机1PPS输入INS的时间同步方法、GPS接收机1PPS输入公用时间同步模块的时间同步方法和参数化方法。其中,参数化方法是指将时间同步误差作为待估参数的一种方法,这种方法需要将时间同步误差限定在一定的范围之内,而且对于低精度的INS该方法未必能够估计出来好的结果,重点研究前两种方法,关于参数化方法可以参考文献[1]、[3]、[4]、[5]。
3.1 GPS接收机1PPS输入INS的时间同步
此处选取马云峰[6]的设计作为说明。该设计利用GPS接收机输出的1PPS,结合CPLD产生的时序实现INS和GPS数据的同步采集。如图1所示,其实现思路是将GPS-OEM板输出的1PPS接入CPLD多通道数据采集控制电路,用它触发硬件内部逻辑从而校准并初始化CPLD的内部定时器,同时保证1PPS到来时刻产生一个同步采样脉冲,实现INS与GPS数据在整秒时刻的同步。可以把这种方法称之为在采样级别的同步,此方法可以获得微秒级的时间同步精度。这种方法适用于具备从底层进行组合导航系统开发的用户。有些商用INS能够直接接收1PPS并在其内部实现如上所述的功能。
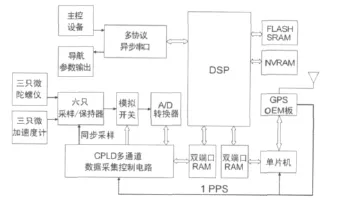
图1 CPLD多通道数据采集控制电路[7]
3.2 GPS接收机1PPS输入公用时间同步模块的时间同步
当使用无外部脉冲输入接口的INS进行的组合导航系统设计时可以使用此种时间同步方法,该方法的核心思想是设计公用的时间同步模块,将1 PPS和GPS时间信息都输入到公用的时间同步模块中来完成时间同步,如图2所示。Li给出了一种叫做高效同步系统(CESS)的典型时间同步设计[8],其模块结构如图3所示。CESS由3部分构成:能够输出1PPS的GPS接收机、多功能数据采集卡(DAQ Card)和数据采集软件,GPS接收机输出的1PPS作为时间参考并触发整个系统,其中多功能数据采集卡由模拟信号输入/输出、计数器/计时器和数字I/O线等组成,Li使用了多种方法对CESS所能达到的同步精度进行评价,并得出所能实现的时间同步精度是0.4ms.该方法引入了一种使用DAQ Card作为公用时间同步模块进行数据采集的思路,只需选择合适的数据采集卡,根据所采用的INS编写相应的数据采集软件即可。与此类似,张开东、朱志勤也是使用DAQ Card实现各自的时间同步方法[9-10]。

Li的方法要求输入DAQ Card的INS信号须是模拟信号,对模拟信号的处理要加入模数转换,而大部分INS产品输出的是数字信号,Ding就针对这种情况设计了如图4所示的时间同步方法[11],该实现方法更具有一般性,其中组合平台既可以是个人电脑也可以是嵌入式的处理器,Ding假定GPS接收机和INS都能够输出PPS,当组合平台检测到PPS信息时将触发相应的寄存器,记录下来当前计数器中的计数,通过寄存器中的计数值可以计算出GPS和INS的PPS信号间的时间差。但很多INS产品无PPS输出,此时可以使用INS的串口信号来触发寄存器。Ding对时间同步的精度进行了详细的评价,当INS有PPS输出时能达到0.1ms,因为PPS代表的正是测量时刻,其时延量相当小,而若INS没有PPS输出时,通过串口数据来触发计时器会引入串口传输时延,因此,其精度相对降低为2ms.此外,Li、李倩设计了基于FPGA的时间同步方法[12-13],Xu设计了基于微控制器辅助PC104的时间同步方法[14],可参考相应的文献。
4 结 论
分析了GPS/INS组合导航时间异步产生的原因,借助GPS的1PPS实现时间同步的基本思路,对当今典型的时间同步方法进行了分类阐述。可以为组合导航系统时间同步设计提供重要参考。
[1]BAR-ITZHACK I,VITEK Y.The Enigma of false bias detection in a strapdown system during transfer alignment[J].Journal of Guidance,Control and Dynamics,1985,8(2):175-180.
[2]陈兵舫,张育林,赵华丽.组合导航系统时间不同步对INS初始对准的影响[J].中国空间科学技术,2001(5):13-20.
[3]LEE H K,LEE J G ,JEE G.Calibration of measurement delay in global positioning system/strapdown inertial navigation system[J].Journal of Guidance,Control and Dynamics,2002,25(2):240-247.
[4]SKOG I,Handel P.Effects of time synchronization errors in GNSS-aided INS[C]//Position,Location and Navigation Symposium,2008IEEE/ION.
[5]杨 涛,王 玮.GPS/SINS组合导航系统实现时间同步的软件方法[J].中国惯性技术学报,2008,16(4):436-438.
[6]马云峰.MSINS/GPS组合导航系统及其数据融合技术研究[D].南京:东南大学,2006.
[7]马云峰.基于DSP的MSINS/GPS组合导航计算机设计[J].微计算机信息,2007,23(6-2):180-181.
[8]LI B,RIZOS C,LEE H,et al.GPS-slaved time synchronization system for hybrid navigation[J].GPS Solutions,2006,10(3):207-217.
[9]张开东,吴美平.SINS/GPS组合导航中的一种高精度时间同步方案[J].战术导弹控制技术,2006(4):66-68.
[10]朱智勤,吴玉宏,羊远新.GPS/INS组合系统中时间同步的模块化实现[J].武汉大学学报·信息科学版,2010,35(7):830-832.
[11]DING Wei-dong,WANG Jin-ling,LI Yong,et al.Time synchronization error and calibration in integrated GPS/INS systems[J].ETRI Journal,2008,30(1):59-66.
[12]LI Yong,MUMFORD J,WANG Jin-ling,et al.Time synchronization analysis of an FPGA based GPS/INS integrated system[C]//Proceedings of IGNSS Symposium 2006,Holiday Inn Surfers Paradise,Australia.
[13]李 倩,战兴群,王立端,等.GPS/INS组合导航系统时间同步系统设计[J].传感技术学报,2009,22(12):1752-1756.
[14]XU Zhen-kai,LI Yong,CHRIS R,et al.Implementation of microcontroller-aided PC104platform for multisensor integrated system[C]//Proceedings of IGNSS Symposium 2009,Holiday Inn Surfers Paradise,Australia.
