三自由度球形电机控制系统的设计与实现
2012-07-14张西多吴星明陈伟海
张西多,吴星明,陈伟海
(北京航空航天大学自动化学院,北京 100191)
0 引 言
多自由度电机的概念最早由Laithwaite提出[1],它的转子由铁磁材料组成,在通电定子线圈的作用下可以在一个关节内实现两自由度运动,它的出现大大激发了研究者的兴趣。随后,研究者提出了各种各样的三自由度的球形电机[2-8],这些电机有一个共同的特点:都需要同时提供多路电流输入。由于球形电机的线圈数目往往多达几十个甚至上百个,因此如何开发出实时高效的电流控制器成为困扰球电机发展的一大问题。本文提出了一种有效的转子位置检测的方法,并设计了球形电机的控制系统,系统主要由上位机和电流控制器组成。上位机主要负责控制算法的运算,并通过串口将相关控制指令发送给电流控制器。电流控制器能够对具有感性特性的定子线圈提供多通道、双极性、大功率、高精度的同步电流驱动信号。同时控制系统能够实时检测到转子的位置信息,将此信息通过串口发送至上位机实时显示。实验结果表明,该控制系统能够根据上位机控制指令为定子线圈精确提供多通道期望电流,驱动转子实现三自由度运动,同时还可以实时检测球电机的姿态信息,为将来闭环控制的实现打下了良好的基础。
1 永磁球形电机设计
1.1 机械结构设计
永磁球形电机的机械结构如图1所示。该电机由一个球形转子和一个球形定子壳组成,电机的输出杆和转子相连。

图1 球形电机样机图
按照一定的通电策略给线圈通电,使得线圈产生相应的磁场,这样转子上的永磁体在线圈产生的磁场的作用下,使得转子能够实现在工作空间内的任意位置的定位。
1.2 位置检测系统设计
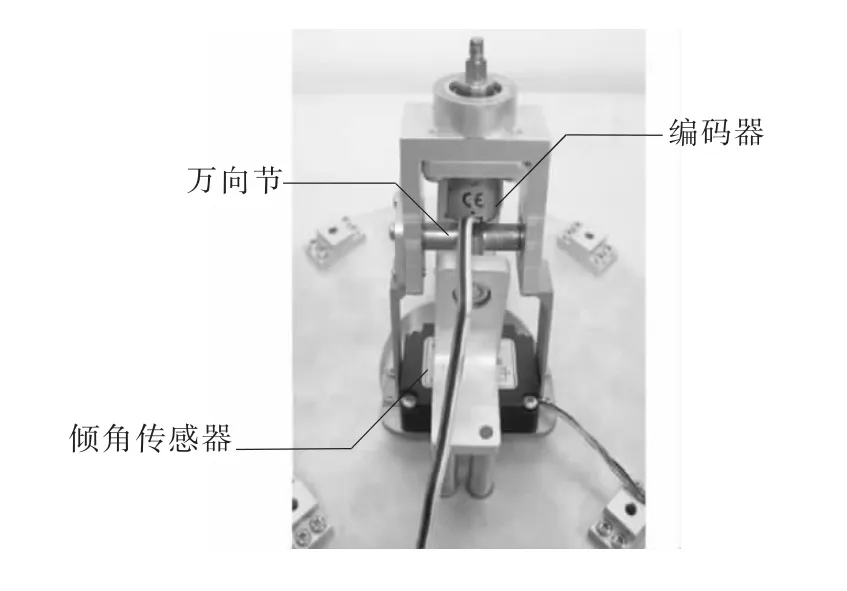
图2 三自由度被动球关节实物图
在该永磁球形电机的设计上,提出了一种被动三自由度球关节的设计思想来实现转子运动的解耦,通过分别测量各个方向上的运动信息来实现转子位置的检测。该检测系统如图2所示。当球电机的转子在电磁力的驱动下产生相应的运动,通过此球关节的机械解耦,旋转编码器能实时且独立地测量出转子自旋的位置γ,而球电机的倾斜运动角度(α,β)则可以由二轴倾角传感器测出。
2 控制系统硬件设计
2.1 总体结构
球形电机的控制系统结构框图如图3所示。

图3 控制系统结构图
该控制系统主要由主控制器CPU、通信接口RS232、RS485、数模转换 D/A、模数转换 A/D、电压电流转换V/I以及电流采样模块组成。
2.2 主控模块设计
该控制系统的主控模块主要由微处理器及其外围辅助电路构成。主控模块的任务有:(1)根据接收到上位机发出的控制指令,控制数模转化芯片产生多路控制电压;(2)对每路线圈电流进行实时采样,通过电流环的闭环控制,使其满足控制精度的要求;(3)对球电机位置传感器的采集信息进行处理,实时获取球电机的转子姿态信息;(4)与上位机进行通信,接收多路线圈电流的设定值,并将球电机的位置信息发送至上位机。
2.3 数模转换模块设计
由于球电机的运动控制需要实现多路控制电流输出,多路电流的同步是一个设计难题。有文献采用多片数模转换芯片,并利用CPLD技术保证多通道电流的同步更新。然而此设计方案忽略了各片数模转换芯片之间的差异性。为了实现多路电流输出地同步性和一致性,本控制系统采用了AD(Analog Devices)公司最新出品的多通道数模转换芯片AD5370作为D/A转换芯片。
2.4 功率驱动模块设计
文献[9-10]给出了永磁球形电机的输出力矩与输入电流之间的关系,根据实际控制的要求,估算出控制输出电流的范围为±3 A。本系统以BB(Burr-Brown)公司大功率运算放大器OPA549为核心构成驱动模块。
本文采用了浮动负载形式,其原理如图4所示。该功率驱动电路主要由OPA549及其外围辅助元器件构成,线圈与采样电阻串联在输出回路,该电路属于典型的电流并联负反馈电路。其输出的电流值为

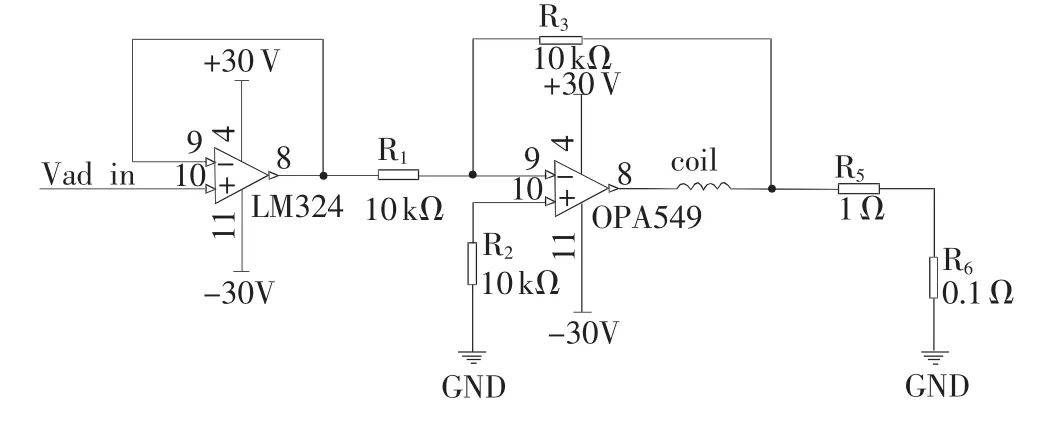
图4 功率驱动模块原理示意图
由式(1)可知,输出的电流值大小仅与输入的控制电压 Vad_in和电阻 R5、R6有关。
2.5 电流环模块的设计
为了增强电流输出的鲁棒性,对输出电流值进行实时跟踪,并采用闭环控制算法使其具有长期的工作稳定性。电流采样电路中,首先借助采样电阻将电流信号转换为电压信号,再对功率电路和数字电路进行隔离,选择带短路和过载检测功能的隔离运放芯片HCPL-788J。电压采样采用TI(Texas Instruments)公司出品的模数转换芯片ADS8364。
电流环控制模块根据电流采样值与电流预设值的偏差,对数模转换控制电压进行修正,使其到达所需的精度要求。电流环控制模块采用数字增量式的PID算法为

式中:KP——比例系数;
KI——积分系数;
KD——微分常数;
e(k)——当前电流偏差值;
e(k-1)——上一次电流偏差值;
e(k-2)——前面第二次电流偏差值;
u(k)——当前计算电流设定值;
u(k-1)——上一次计算得到的电流预设值;
u(k-2)——前面第二次计算得到的电流预设值;
q0,q1,q2——可调参数,q0=KP+KD+KI,q1=KP-2KD,
q2=KI;
k——采样时刻。
3 控制系统软件设计
ARM软件设计采用自顶向下的设计思路,按功能划分软件模块。ARM软件程序的设计主要包括系统初始化、中断处理程序和电流PID调节子程序[11]。软件的功能框图如图5所示。
3.1 中断服务程序

图5 软件设计框图
本设计主要包括3种中断子程序:(1)数模转换中断子程序;(2)电流采样子程序;(3)串口通信子程序。根据实际的实验效果,将以上3种中断程序的优先级设置为:(1)>(2)>(3)。
3.2 电流调节子程序
电流输出的调节子程序由A/D采样的结束信号来触发。每采样一次电流值就进行一次电流环的计算。电流PID调节子程序流程图如图6所示。

图6 电流调节子程序流程图
4 系统实现
球形电机控制系统总体实物图如图7所示。该控制系统由上位机(个人计算机)和下位机(电流控制器)组成。

图7 实验系统实物图
为了检验电流控制器的性能,分别做了电流跟随实验和电流稳定性实验,来验证电流控制器的精确性和稳定性。电流跟随实验将对实际的定子线圈供电,在-1500~+1500 mA范围内给定设定电流值,用电流表测量实际电流的输出值。其中一路的实验数据如1表所示,其误差值如图8所示。

表1 电流跟随实验部分数据表

图8 电流跟随误差曲线图
电流稳定性实验将电流值设定为0.8A,对定子线圈加载电流,通电20 min,每隔1 min测量电流值,测量结果如图9所示。

图9 电流稳定性实验图
从上面的实验数据可知,此控制器的电流输出的精确性和稳定性均具有良好的效果,从而验证了此设计方案的有效性。
5 结束语
针对三自由度永磁球形电机定子线圈驱动需要多通道、双极性、高精度的电流要求,本文提出了一种基于ARM和AD5370的控制系统的设计方案。实验表明,该控制系统具有输出电流精度高、稳定性好等特点,完全能满足球形电机的控制要求。同时,本文提出了一种有效的转子三维位置检测的方法,通过该系统能实时得到球形电机的转子姿态信息,为今后真正实现球形电机的位置闭环控制打下基础。
[1]Williams F C,Laithwaite E R,Eastham J.Development and design of spherical induction actuators[J].Proc Inst Elect Eng,1959,106(3036U):471-847.
[2]Lee K M,Kwan C,Design concept development of a spherical stepper for robotic applications[J].IEEE Trans on Robot Automation,1991,17(3):320-332.
[3]Yan L,Chen I M,Lim C K,et al.Design and analysis of a permanent magnet spherical actuator[J].IEEE/ASME Trans Mechatron,1998,13(2):239-248.
[4]Wang J B,Wang W Y,Geraint W,et al.A novel spherical permanent magnet actuator with three degreesof-freedom[J].IEEE Transactions on Magnetics,1998,34(4):2078-2080.
[5]Yan L,Chen I M,Yang G L,et al.Analytical and experimentalinvestigation on the magnetic field and torque ofa permanentmagnetsphericalactuator[J].IEEE/ASME Trans Mechatran,2006,11(4):409-419.
[6]Xia C L,Guo C,Shi T N.A neural-network-identifier and fuzzy-controller-based algorithm for dynamic decoupling control of permanent-magnet spherical motor[J].IEEE Transactions on Industrial Electronics,2010,57(8):2868-2878.
[7]周立功.深入浅出ARM7[M].北京:北京航空航天大学出版社,2005:51-57.
[8]寇金桥,陈伟海,于守谦.球型电机电流控制器设计[J].计算机测量与控制,2005,13(8):790-792.
[9]Wu X M,Guo F H,Chen W H,et al.Design of openloop controller for permanent magnet spherical motor[C]∥The 6th IEEE Conference on Industrial Electronics and Applications (ICIEA 2011).Beijing:IEEE,2011:1116-1121.
[10]Chen W H,Zhang L,Guo F H,et al.Design and modeling of a spherical actuator with three dimensional orientation measurement system[J].Advanced Materials Research,2011(317):1088-1097.
[11]刘锐,王林.基于ARM数据采集系统的设计[J].中国测试,2010,36(4):89-92.
