基于TinyOS的CC2430 RSSI定位的设计与实现
2012-07-13陶正苏
刘 明,陶正苏
(上海交通大学 电子信息与电气工程学院,上海 200240)
无线传感器网络是由分布在给定区域内大量传感器节点以无线自组织多跳的通信方式构成的网络系统,目前在环境监测保护、楼宇监控、家庭安防、医疗护理、目标跟踪、军事等领域已获得了广泛的应用[1]。
1 CC2430芯片介绍
CC2430芯片是TI/Chipcon公司生产的真正意义上的片上系统(SOC)级解决方案,它集增强型工业标准8051核心、优秀的射频芯片CC2420、强大的外围资源于一体。集成的外设资源主要有DMA、定时/计数器、看门狗定时器、AES-128协处理器、8通道 8~14位 ADC、USART、休眠模式定时器、复位电路及21个可编程I/O[2],支持IEEE802.15.4和ZigBee协议。
CC2430芯片具有性能高、功耗低、接收灵敏度高、抗干扰性强、硬件CSMA/CA支持、数字化RSSI/LQI支持、DMA支持等特点,支持无线数据传输率高达250 kbps。
2 TinyOS系统与nesC语言
由于无线传感器网络的特殊性,需要操作系统能够高效地使用传感器节点的有限内存、低功耗处理器、多样传感器、有限的电源,并且能对各种特定应用提供最大的支持。
基于此,UC Berkeley研究人员专为嵌入式无线传感器网络开发出TinyOS系统,目前已经成为无线传感器网络领域事实上的标准平台。TinyOS系统具有组件化编程、事件驱动模式、轻量级线程技术、主动消息通信技术等特点[3]。TinyOS采用组件架构方式,快速实现各种应用,组件包括网络协议、分布式服务、传感器驱动以及数据获取工具等,一个完整的应用系统通过组合不同的组件来实现。采用事件驱动的运行模型,可以处理高并发性的事件,并实现节能。
TinyOS应用程序通常由顶层配件、核心处理模块和其它组件构成。每个应用程序有且仅有一个顶层配件,组件间通过接口进行连接通信,下层组件提供接口,通过provide interface interfaceName来声明,上层组件使用接口,通过use interface interfaceName来声明。接口提供两类函数,分别是命令(command)函数与事件(event)函数,上层组件向下层组件发出命令,启动下层组件的功能;下层组件完成相应的功能后向上层组件报告事件。应用程序总体框架如图1所示。
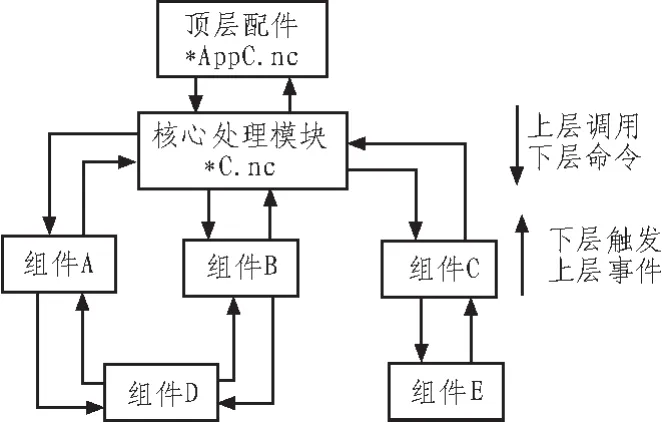
图1 TinyOS应用程序框架图Fig.1 TinyOS application framework
TinyOS系统本身以及应用程序都是采用nesC语言编写,nesC语言是对C语言的扩展,具有类似于C语言的语法,但支持TinyOS的并发模型,同时具有组件化机制,能够与其他组件连接在一起从而形成一个鲁棒性很好的嵌入式系统。 nesC语言把组件化/模块化的编程思想和基于事件驱动的执行模型紧密结合起来。应用nesC语言能够更快速方便地编写基于TinyOS的应用程序。
3 RSSI定位原理
本文在RSSI定位基础上使用质心算法提高定位精度,如图2所示,最后求得的盲节点坐标为点D、E和F组成的三角形的质心。
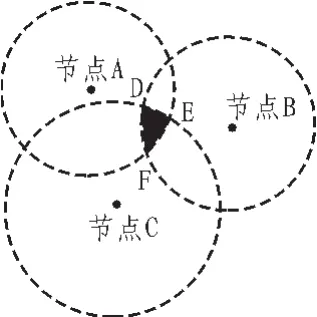
图2 质心法定位示意图Fig.2 Schematic diagram of centroid algorithm
4 定位算法在TinyOS中的实现
根据RSSI测距原理,要确定盲节点的位置,至少需要三个锚节点(已知位置的接收节点),并需要一个汇聚节点来传输各锚节点的RSSI寄存器值到PC机,最终通过串口调试助手来显示结果并进一步定位盲节点坐标。下面分别介绍移动盲节点、静态锚节点以及汇聚节点的实现流程。
4.1 盲节点
盲节点的主要任务是向所有锚节点广播信息,具体的流程如图3所示。
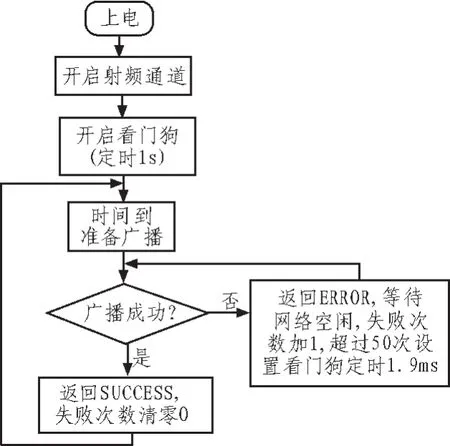
图3 盲节点工作流程图Fig.3 Working flow chart of blind node
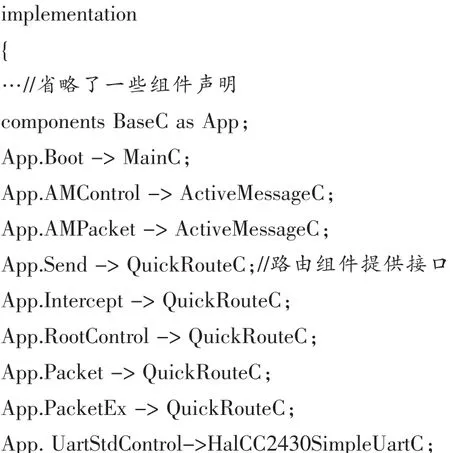
TinyOS程序顶层配件主体如下:

4.2 静态锚节点
锚节点主要功能是接收盲节点的广播信息,然后提取RSSI寄存器中的值,通过路由层发送接口转发给汇聚节点,或转发其它锚节点的数据给汇聚节点。主要实现流程如图4所示。

图4 锚节点工作流程图Fig.4 Flow chart of anchor node working
锚节点的组件连接如下:

静态锚节点通过CC2420Packet接口来获取RSSI值,具体函数如下:

4.3 汇聚节点
汇聚节点,也称为基站,主要负责接收各锚节点发送的接收表信息,包括锚节点ID、DSN和RSSI,并将这些数据包通过串口转发到PC机。具体流程如图5所示。

图5 汇聚节点工作流程图Fig.5 Flow chart of aggregation node working
汇聚节点组件连接如下:

4.4 程序移植与实验结果
本实验在Cygwin平台下进行编译与移植,编译过程如图6 所示[5]。

图6 TinyOS编译流程图Fig.6 TinyOS compiling and transporting flow chart
进入Cygwin环境,切换到TinyOS定位程序目录下,输入编译移植命令:

其中NID是节点号,是节点的身份标识,同一网络中的节点号必须惟一;GRP是网络号,同一网络中所有节点的网络号必须一致。
在所有节点的TinyOS移植完毕后,启动所有节点,应用串口调试助手显示汇聚节点发送到PC机的RSSI数据,数据结构如图7所示,其中1~7个字节数据为信息包的包头,8~9两字节为中继锚节点的节点号,10~11两字节为源锚节点的节点号,12~13字节为源锚节点到汇聚节点的跳数,14~15字节为盲节点的节点号,21~22两字节数据为锚节点的RSSI值。

图7 锚节点RSSI值Fig.7 RSSI register values of anchor nodes
在确定PC机能够正确接收各锚节点的RSSI值后,还需要选取合适的RSSI测距信号衰减模型,将RSSI值转化为距离。本实验中采用在无线信号传输中应用广泛的对数-常态模型[6],如式(1)所示:

其中A为盲节点与锚节点相距1米时RSSI的绝对值,本实验中测得A≈40,n为无线信号传播指数,一般取2~4,经过多次试验取3.0较为合适。将本模型应用在所测得的RSSI中,并对比实际距离得到如表1和图8所示结果:表1中d为RSSI理论模型所得距离,D为实际测量结果。
在实验室环境下布置了4个锚节点、1个汇聚节点和1个盲节点,4个锚节点分布在4.8×3.6 m2矩形的4个点,盲节点位于矩形区域内,汇聚节点在矩形区域外。

表1 RSSI值与距离的转换Tab.1 Conversion between RSSI value and distance

图8 RSSI测距模型验证Fig.8 RSSI ranging model validation
读取如图7所示的各锚节点RSSI值,在Matlab环境下通过对数-常态传播模型将RSSI值转变为距离,最后通过质心算法对盲节点进行定位,计算出盲节点的坐标。在实验中采用10次测量取平均值来减小定位误差,并计算对比盲节点理论坐标与实际坐标的误差,得到如图9所示的定位结果。
通过定位算法计算出的盲节点坐标为(2.483 1,1.018 5),实际盲节点坐标为(2.4,1.2),误差为 0.199 6 m,基本实现了对盲节点的定位。
5 结 论
本文在TinyOS操作系统下实现了基于CC2430模块的RSSI定位,分析了盲节点、锚节点和汇聚节点的工作流程,确定了实验室条件下无线传输模型Shadowing模型参数,最后利用Matlab计算出盲节点坐标。定位结果显示,通过定位算法所得的盲节点坐标与实际坐标误差为0.199 6 m,可满足大多数无线传感器网络对节点定位的要求。

图9 RSSI定位结果Fig.9 Result of RSSI localization
[1]Akyildiz I F, Su W,Sankarasubramaniam Y,et al.Wireless sensor networks:a survey[J].Computer Networks,2002(38):395-398.
[2]Texas Instruments.A true system-on-chip solution for 2.4 Ghz IEEE 802.15.4/ZigBee[EB/OL].(2007).http://www.ti.com/lit/ds/symlink/cc2430.pdf.
[3]潘浩,董齐芬,张贵军,等.无线传感器网络操作系统TinyOS[M].北京:清华大学出版社,2011.
[4]陈昌祥,达维,周洁.基于RSSI的无线传感器网络距离修正定位算法[J].通信技术,2011,44(2):65-69.
CHEN Chang-xiang, DA Wei, ZHOU Jie.A wireless sensor netoworks distance revised localization algorithm based on RSSI[J].Communication Technology,2011,44(2):65-69.
[5]周迪,陶正苏,陈德富,等.CC2430节点移植TinyOS[J].机电产品开发与创新,2009, 22(6):97-99.
ZHOU Di,TAO Zheng-su,CHEN De-fu,et al.The transplanting of TinyOS program to CC2430[J].Electromechanical Product Development and Innovation,2009,22(6):97-99.
[6]王正斌,秦卫平.2.4 GHz无线局域网的室内路径损耗新模型[C]//中国电子学会第十四届信息论学术年会,2007.
