应答器与测速组合定位在地铁中的应用
2012-07-13夏青
夏 青
(兰州交通大学自动化与电气工程学院,兰州 730070)
城市轨道交通包含地铁、市郊快速、轻轨、独轨等多种类型的铁路,其中地铁更具代表性[1]。而地铁的主要特点是线路封闭、行车密度大。随着城市建设的不断推进,城市轨道交通也发生着日新月异的变化,从原来的固定闭塞系统、准移动闭塞系统到现在的移动闭塞系统,目前新建的轨道交通线路大多采用先进的基于通信列车控制(CBTC)的移动闭塞系统,而在此系统中列车定位是一项具有基础意义的关键性技术。
目前在国内外城市轨道交通中,列车定位方法主要有轨道电路定位、电子计轴定位、测速定位、查询应答器定位、感应回线车载传感器定位、无线扩频通信定位和GPS定位等[2],这些定位技术各有特点。鉴于这些定位技术的优缺点,本文提出一种应答器与测速的组合定位方案。采用这种方案,既能保证列车定位的精度,又能降低设备初期投资以及后期维护的费用。
1 列车组合定位概述
1.1 列车定位的作用及选用要求
在城市轨道交通行车指挥系统中,列车定位技术的作用巨大。它不仅要为列车自动防护(ATP)子系统提供位置信息, 保证列车安全间隔运行,并作为列车在车站停车后打开车门以及站内屏蔽门的依据,还为列车自动驾驶(ATO)子系统提供列车精确位置信息。作为列车计算速度曲线,实施速度自动控制的主要参数,为列车自动监督(ATS)子系统提供列车位置信息,作为显示列车运行状态的基础信息。
城市轨道交通列车定位技术的重要作用要求其首先必须能保证提供正确的列车位置信息;其次对列车定位的精度提出了更高要求;另外,提高信息及时性以及减少误差也非常重要。
根据城市轨道交通的特点,在制定其定位技术方案时,必须考虑以下几个因素。
1)系统符合故障-安全原则,在发生定位故障时,能够有可靠替代方式或降速直至停车。
2)系统要求具有高可靠性,采用多种检测方式相结合的冗余定位、检测方式。
3)系统要求具有高可用性,采用CBTC条件下的列车定位,可实现列车实时追踪。
4)系统的造价成本合理,尽量选用成熟的设备,减少轨旁设备以降低设备维护费用。
目前应用的一些轨道交通定位方法,都存在着这样或那样的不足之处,无法在保证列车定位系统可靠性、安全性的情况下,实现系统成本与定位精度的平衡。采用组合定位方案可使系统满足安全性、定位精度、可靠性和造价等方面的要求。
1.2 组合定位的概念
由于单一的定位系统偶然的故障会导致整个系统无法正常工作,甚至会造成灾难性的后果;而且每一种定位的方法总有其固有的缺点,单一的定位方法无法在定位的精度、可靠性和代价之间作到很好的平衡。而多种定位技术集成的优势在于能通过冗余、互补和多种类的信息为系统提供更为精确的信息,使整个轨道交通和指挥系统的安全性、测量精度、可靠性、造价等方面达到一定的平衡。在已有的轨道交通和高速铁路交通中采取的定位大多数是多种方法的综合,最多只是以某种方法为主,其他方法为辅。所以,综合的使用各种定位手段将是目前解决轨道交通和高速铁路交通定位的最好途径。
根据应答器定位和测速定位的各自特点,采用应答器与测速的组合定位方案集合了两种定位技术各自的优势。日本研究和开发的计算机和无线电辅助列车控制系统(CARAT)利用记录车轮转速来计算任意点列车位置,特定地点采用车地感应通信方式检测位置,此定位法与应答器测速组合定位法在原理上是相同的。测速定位法在轮径变化、打滑或空转时,存在累计误差,此时通过加查询应答器纠正累计误差的方法不断校正其位置信息。在CBTC模式下,依靠测速传感器和多普勒雷达精确测速以及轨旁应答器的绝对位置信息,列车可以实时定位,并借助CBTC车地传输通道实时将列车的具体位置通知地面。
2 应答器与测速组合定位方法
2.1 应答器定位
应答器定位系统由车载查询器、地面应答器和轨旁电子单元(LEU)组成。应答器辅设在轨道中央,车载天线安装在机车上与应答器相对应的位置。应答器可分为有源应答器和无源应答器,其中有源应答器与LEU连接,应答器的内部寄存器按协议以数据形式存放实现列车速度监控和其他行车功能所必须的数据。当列车驶过地面应答器且车载天线与应答器对准时,应答器天线首先以一定的频率通过电磁感应方法将能量传递给应答器;应答器内部电路在接收到能量后即开始工作,将所储存的数据以某种调制方式通过电磁感应传送到车上。图1为应答器基本工作原理。
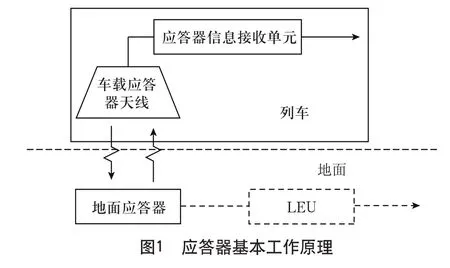
车载设备接收到一条安全的数字应答器报文,该报文给出了应答器的标识,尤其是该应答器中心点的地理位置。应答器支持安全定位,所使用的应答器安全检测精度是一个系统参数。为了实现应答器的安全定位,当车载天线距应答器的距离超出给定的距离时,列车接收不到应答器报文。应答器可以用作连续式列车速度自动控制系统的列车精确定位设备(这时应答器内部储存的数据是固定的);也可以用作点式列车速度自动控制系统的列车检测、定位辅助设备,作为系统向列车传输数据的通道。
查询应答器是目前使用成熟的点式车地通信设备,定位精度较高,在复线铁路上可以正确区分列车行驶的股道,维修费用低、使用寿命长且能在恶劣条件下稳定工作,能满足列车运行速度为0~500 km/h的通信要求,安全性好;不足之处是只能给出点式定位信息,存在设置间距和投资规模的矛盾[3]。
2.2 测速定位
测速定位就是通过不断测量列车的即时运行速度,对列车的即时速度进行积分(或求和)的方法得到列车的运行距离。测速电机是一个经过广泛应用的单元,把机械转速变换成电压信号,其输出电压脉冲信号数量与输入的转速成正比关系,图2为测速电机原理图。为了得到较为准确的位置信息,在计算具体位置信息时,引入列车的即时速度信息。如在某一个速度采样时间点tn上测得列车的即时速度为v(tn),则列车即时位置:
S=S0+∑v(tn)·Δt
式中:
S0——初始位置;
Δt——列车速度采样时间间隔。
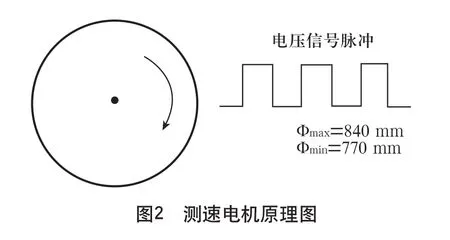
用这种方式计算列车位置信息的缺点是:1)因车轮的磨损导致通过车轮直径获得路程数据的误差大。一般轨道交通的车轮直径为770~840 mm。车轮表面磨损0.5 mm时,列车每行驶约305~335 m就会产生1 m的误差。2)行驶中车轮会出现打滑空转的情况,这样可使误差更大。3)这些误差是线性累计的,即随着行驶里程的增加其绝对误差会越来越大。为了解决这个误差,在机车上安装多普勒雷达,通过多普勒频移效应,直接测量列车相对于雷达波反射面的速度。
车载同时安装测速电机和多普勒雷达。测速电机和雷达单元一起用于列车速度和距离的精确检测。测速电机通过计算经车轮旋转在发电机里产生的电压信号来测量列车的速度和距离。雷达则通过评估反射雷达波的多普勒效应来计算列车速度和距离值。雷达的测算结果完全不受列车的空转和滑行的影响。两种传感方式的有机结合得到了更加安全、可靠、精确的速度距离值。现场实验通过比较预先测量的两点间的距离和车载测速系统测量的结果,测速电机的误差可控制在0.3%,多普勒雷达的误差为0.1%,然而多普勒雷达的测量精度存在不稳定性,可通过多点测量来消除这一缺点。实验结果表明位置检测的精度可达到实用水平[4]。
2.3 组合定位流程及应用
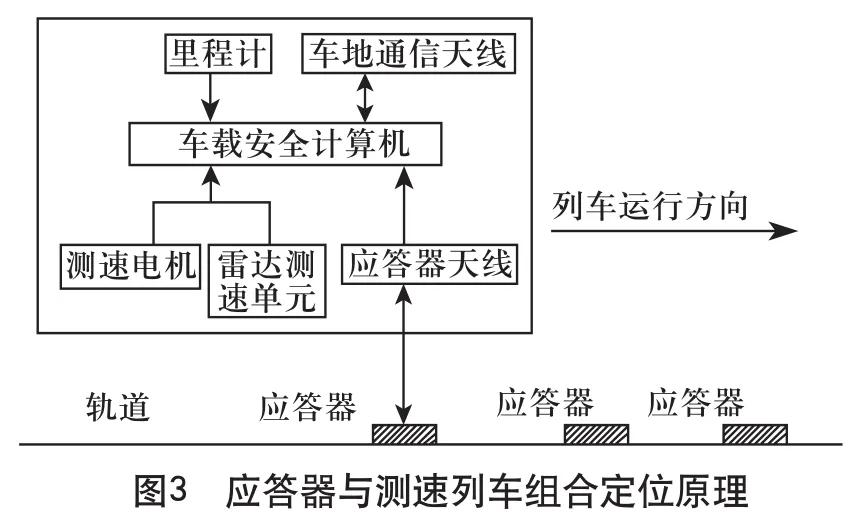
综合以上两个定位单元,列车越过第一个应答器后,通过车载测速单元计算列车所在位置,得到的位置信息与列车实际位置存在误差,且误差可能不断增大,当列车运行到第二个应答器时,接收到应答器报文中的位置信息,自动刷新其位置参数,得到更准确的位置参数。图3为应答器与测速列车定位原理。可根据测速测距单元的误差设置应答器的间距将定位误差限定在列控系统要求的范围内,例如测速测距单元的误差为0.5%,每300 m设置一个应答器可将定位误差控制在1.5 m。
列车定位的具体流程描述:在车载ATP启动时,列车处于未定位状态。车载安全计算机的线路数据库记录有应答器的位置,一旦列车连续经过2个应答器,初始化它的位置参数,这样列车进入已定位状态。具体步骤如下。
1)检测到第1个应答器后,就可以确定描述应答器位置的数据库单元。根据该描述即可确定列车所在的位置,但是列车不知道自己在轨道上的运行方向。
2)检测到第2个应答器后就可以确定列车的运行方向及相对于轨道默认方向的列车方向。这是因为通过车载数据库及列车从一个应答器运行到另一个应答器时,由里程计测得的列车运行方向可以判断出相邻应答器的方向。
3)通过第2个应答器后,列车位置可由测速电机和雷达测量确定。在应答器之间,由于连续的位移测量,被定位列车的定位参数可以被实时更新。
4)当列车运行时,位移测量的误差可能导致列车的位移增加一个不确定的值。
5)当经过另外一个应答器时,列车将刷新它的位置参数,以便通过计算一个更小的位置不确定值得到更加精确的位置。
该方案利用车载设备自主定位的特点,可以保证列车在任何地方、任何时候都可以输出定位信息,定位数据由车载设备经CBTC车地通信通道传输给地面控制中心,而不是反之,保证了系统对定位时效性的需求。同时利用测速定位作为辅助,可大量减少应答器的设置数量,降低了设备初期投入和维护成本。正是因为有了这些优势,CBTC条件下的应答器与测速组合定位技术在城市轨道交通中开始广泛应用。
广州地铁4号线采用西门子公司的Trainguard MT信号系统[5],该系统是基于无线的列车控制系统。依靠测速仪及多普勒雷达精确测速与轨旁应答器的绝对位置信息,可以使列车精确定位,并借助无线局域网系统(WLAN)实时通知列车的具体位置。在无线系统故障的情况下,以应答器实现点式通信,计轴系统作为后备位置检测系统,使轨旁系统在降级模式下实时检测到列车所在位置。该系统同时应用于南京地铁2号线、北京地铁10号线以及广州地铁5号线。
3 结束语
城市轨道交通尤其地铁线路环境复杂,轨旁设备维护困难,采用应答器加测速组合定位的方法可提高整个系统的容错能力、信息的可信度、空间和时间的覆盖范围,同时降低获得信息的费用并且缩短获得信息的时间;将离散和连续的定位信息进行融合提高定位的可靠性;能够将定位系统主要建立在车载环境中,不需在轨旁安装轨道电路等设备,能够改善系统的工作环境、提高系统的可靠性、降低系统的生命周期费用;还能够满足时间和空间的可用性,不受地理环境的影响。该方案可满足移动闭塞系统精确定位的需求,在车地通信故障的情况下以应答器实现点式通信,确保了信号系统的高可用性。
[1] 杨光,唐祯敏.几种典型轨道交通运行控制系统的比较[J].铁道学报,2009,2(31):82-87.
[2] 徐炜.城市轨道交通列车定位系统[J].铁路通信信号工程技术,2009,4(6):41-44.
[3] 张雅静,王剑,蔡伯根.基于GNSS的虚拟应答器研究[J].铁道学报,2008,30(1):104-108.
[4] Teruo Kobayashi, Osamu Iba, Hiroshi Ebine, et al. Advanced train administration and communication system based on ADS Technologies[C].The Fourth International Symposium on Autonomous Decentralized Systems,Integration of Heterogeneous Systems. Proceedings. 1999: 388-391.
[5] 孟凡江,黎晓东.CBTC的列车监控与追踪功能[J].铁道通信信号, 2007(3):14-16.
