多种信号采集的声光智能小车研究
2012-07-12西南科技大学王洪艳王文龙
西南科技大学 熊 亮 王洪艳 王 梁 王文龙
多种信号采集的声光智能小车研究
西南科技大学 熊 亮 王洪艳 王 梁 王文龙
基于AVR单片机为核心,进行包括循迹、避障、寻声等多种信号采集方案的智能控制系统的关键技术研究,设计出一种集多种性能于一身的智能小车用以解决单一的信号采集方案存在的抗干扰能力差、信号不稳定、容易产生误判等一系列问 题。
AVR单片机;智能控制;多信号
随着计算机技术、控制技术、信息技术的快速发展,工业的生产和管理进入了自动化、信息化和智能化时代,智能化已经成为时代发展的需要。在柔性自动化生产线、智能仓储管理及物流配送等领域,当生产现场环境恶劣时,人工不能完成的任务如物料运输和装卸等,可采用智能小车的循迹避障系统完成相应的任务。基于生产现场和日常生活的实际需要,研究和开发智能小车系统具有十分重要的意义。
一、光控部分
此设计部分主要是通过调制光源或特殊光源控制小车移动,实现在车间环境、高速公路、建筑工地等环境内工件、货物等的光引导无轨运输。
1.基本思路:基于脉宽调制直流电动机控制原理的机电一体化机器人设计与制作。
2.技术关键:经该实验制作出的机器人以小型数字集成电路为控制单元,以光敏电阻为传感单元,以直线电机为动力单元,可以实现以光线发生器为无线引导装置的二维自由运动。
3.技术分析:本项目主要是以PWM电动机控制为基础,开发一种可以追随光源的智能小车,电位器用光敏电阻(LDR)取代。照射到传感器上的光线得总量,决定了每一个电动机的速度,以及随后机器人的运动方向,根据传感器安放的方式不同,小车将会追随或者避开光源。脉宽调制电动机控制,对于控制小型DC电动机的速度和转矩来说,是很有效的。

图1 J1和J2动作
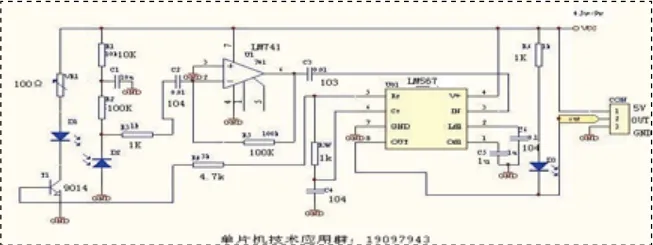
图2 红外避障电路
4.创新点:(1)开发出一套偏差处理算法,利用此算法只需在小车前方放置三个光敏电阻传感器可以检测出前方180°视野范围内的光源位置;(2)分析传感器检测到的光源信号,根据光信号的强弱判断小车与光源的距离,并决定小车行进速度及行进方向。
二、声控部分
此设计部分主要在小车的控制系统中加入语音识别系统,使控制者可以用语音对小车进行控制,产生相应的动作,而且小车和控制者还具有一定的交互功能。
控制者通过麦克风发出控制命令,该命令经过语音识别模块识别后,根据控制信号的类型产生一个8位的控制码,语音识别模块通过端口将控制码输出至无线发送模块,然后语音识别模块发出控制信号,控制无线发送模块将该控制码以无线电波形式发送出去,车载控制部分接收到后便控制小车产生预期的动作。
如果由麦克风录入的单词与存储器原有单词相匹配,对应的PA输出口有效,并驱动断电器器,电机运动。在本设计中,智能车主要有“前进”(J1)、“后退”(J2)、“左转”(J3)、“右转”(J4)“停止”等几种动作。其中,“停止”定义为clearOutput,其他依次定义为PA1、PA2、PA3。以“前进”(J1)和“后退”(J2)为例,如图1所示。
三、壁障部分
1.红外壁障电路
D1发射红外线,D2接收红外信号。LM567第⑤、⑥脚为译码中心频率设定端,一般通过调整其外接可变电阻W改变捕捉的中心频率。红外载波信号来自LM567的第5角,也即载波信号与捕捉中心频率一致,能够极大的提高抗干扰特性。当接收到的红外载波信号和捕捉中心频率一致时,说明不是干扰,LM567的第8角输出低电平,如图2所示。
2.音频译码器LM567作用要领
(1)LM567输出部分与普通数字IC等有所不同,其内部是一个集电极开路的NPN型三极管,使用时,⑧脚与正电源间必须接一电阻或者其它负载,才能保证IC译码后输出低电平。(2)实验表明:LM567接通电源瞬间,⑧脚会输出一低电平脉冲。因此,用于作遥控器译码控制时,应在输出端后加装RC积分延时电路,以免每次断电后,重新复电时产生误动作。(3)LM567第⑤、⑥脚为译码中心频率设定端,一般通过调整其外接可变电阻W改变频率,经笔者实验发现,当W阻值变为0Ω或无限大时,⑧脚电平状态即使无信号输入时也会变为低电平,因此,在调整W时,不能使其短路或开路。(4)LM567的工作电压对译码器的中心频率有所影响,故最好采用稳压供电。(5)LM567②脚外接电容决定着锁相环捕捉带宽,容量越小,捕捉带宽越宽,但使用时,不可为增大捕捉带宽而一味减小电容容量,否则,不但会降低抗干扰能力,严重时还会出现误触发现象,降低整机的可靠性。
当D2接收到D1发射出经反射物反射的信号,D3发光,输出端U01(LM567)的8脚输出低电平。
3.创新点
红外线发射部分不设专门的信号发生电路,而是直接从接收部分的检测电路U01的5脚引人信号,此信号是U01锁相音频译码器的锁相中心频率,这样既简化了线路和调试工作,又防止了周围环境变化和元件参数变化对收发频率造成的差异,实现了红外线发射与接收工作频率的同步自动跟踪,使电路的稳定性和抗干扰能力大大加强。
[1]金中浩.声控多功能小车设计[J].数字技术与应用.
[2]林志翔.肖宝森.新型多功能智能小车的设计与应用[J].现代电子技术.
[3]冯平.张治中.多功能语音控制小车的设计与实现[J].数字通信.
[4]王煜东.传感器应用技术[M].西安电子科技大学出版社,2006.
注:西南科技大学大学生创新基金项目(项目编号:CX11-115)。
本文导师:孙涛,男,西南科技大学讲师,主要研究方向:仪表技术及传感器,人工智能控制。