虚拟现实技术在塔吊模拟培训系统中的应用
2012-07-11刘海平邵晓根卜慧平
丁 宾,刘海平,邵晓根,卜慧平
(1.徐州工程学院 信电工程学院,徐州 221111;2.徐州翰林科技有限公司,徐州 320300)
0 引言
中国正处在城市化进程中,起重机等工程机械在其中发挥了关键作用。工程机械大多属于特种设备,根据国家有关规定,工程机械的驾驶员在上岗之前必须经过严格的培训,考核合格才能上岗。目前的工程机械培训主要采用真机操作,这要求培训机构有更多的训练机械,且工程机械耗费能源较高,使得传统的工程机械驾驶员培训成本很高。许多工程机械作业属于特种危险作业,传统的培训方式存在较大的安全隐患。采用虚拟现实技术,利用计算机实现工程机械模拟培训是一种较先进的培训方式。与直接进行真机操作培训相比,采用模拟训练器具有成本低、培训周期短、对场地要求低、全天候、安全环保等优点。当然模拟训练器不能完全取代真机操作,一般采用先在模拟训练器上进行基础培训,再进行真机操作。国内科研院所对工程机械模拟培训进行了广泛的研究[1~3],但成熟的产品并不多。
本文介绍塔式起重机的模拟培训系统的开发,包括系统开发的软硬件平台、建模、操作手柄与按钮、吊重的运动模拟、声音与帮助系统等内容。
1 系统的软硬件开发平台
1.1 软件开发平台
本系统的软件开发基于Windows XP操作系统,利用3DS MAX 2011进行三维建模,利用Photoshop进行界面图像和纹理图像的处理,利用基于OpenGL的三维引擎Newton进行虚拟现实系统开发。
1.2 系统硬件部分
本系统运行的硬件平台配置如下:CPU 为Pentium(R) Dual-Core 2.5 GHz,内存2GB,硬盘320 GB , 显卡ATI HD5550以上,显示设备为28寸显示器,可根据需要使用投影仪输出图像,加强沉浸效果。为了播放帮助声音与音效,系统需配置声卡。
操作手柄及控制按钮通过USB接口与计算机相连,将参数传递给计算机用于控制起重机的操作。
2 系统的组成与实现
2.1 塔机模型
利用3DS MAX构建建筑物、车辆、机械、人员、标志、地面、天空背景等三维模型。塔式起重机是本系统中最重要的模型,依据实际尺寸建立的塔式起重机模型是整个训练场景的核心,尽量减少模型的面数,降低对计算机性能的要求。
在建模过程中合理地组织模型的层次关系,使用3DS MAX中的分组工具(Group,Assembly和Character),按照运行控制的需要把模型合理分组,不仅有助于快速的建模,还有助于后期的优化和模型的管理。图1为所建立的塔机模型。
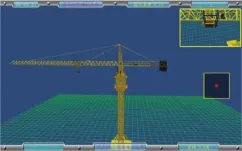
图1 塔机模型
2.2 场景模型
根据由中华人民共和国建设部组织编制的培训标准[4]中塔式起重机驾驶员职业技能鉴定实际操作部分,设定训练与考核场景,严格按照标准规定的外形尺寸、布局一致进行建模。
该模块共包括十个场景模型,其中有六个训练场景、一个综合作业场景和三个考核场景。图2为其中一个训练场景,图3为一个考核场景“圆桶过钢架”。

图2 训练场景之一

图3 考核场景之一:圆桶过钢架
2.3 操纵手柄与按钮
手柄功能如图4所示。其中左手柄控制小车运动和大臂回转,右手柄的功能是控制吊钩的升降。左右手柄都有多个档位,大臂回转、小车和吊钩的运动速度是根据操纵手柄的档位控制的,档位大即速度快,档位小即速度慢。本系统可实现利用手柄进行操作,也可以利用键盘进行操作。
除了操作手柄外,还配有若干按钮用来控制系统功能,如图5所示。通过按钮与手柄组合操作可对视角进行调整。本系统定义了4种视角。
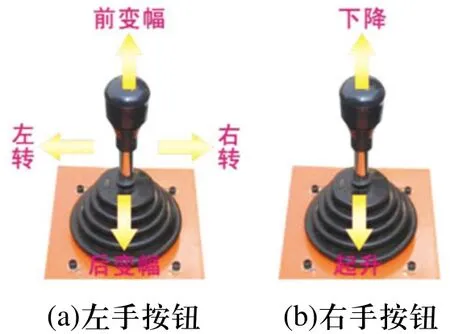
图4 手柄功能
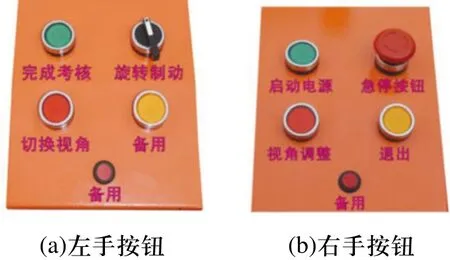
图5 按钮功能
2.4 吊重运动模拟
吊重的真实感运动模拟是实现起重机虚拟操作系统的关键,现有的研究主要利用第二类拉格朗日方程分析吊重与小车组成的系统[5~7]。由于当前的起重机都设有减摇装置[8],吊绳难以简化为理想的、无伸缩性的绳索,使得真实的吊重运动状态非常复杂,难以进行精确的力学分析,且往往需要求解微分方程,对系统的实时性造成影响。我们的做法是利用简单的数学经验公式计算吊重的摆角,模拟出视觉上具有真实感的惯性运动。如突然停止时,吊重的摆角随时间的变化符合正弦函数:

其中Φ是吊重摆角,t是时间,T是吊重摆动的周期,f (t)是吊重的最大摆动角度随时间的衰减函数,可设置为一个简单的分段线性函数。经过细致地调整参数,可以很好地达到视觉效果上的真实感。本系统还加入风吹动的效果,将风吹引起的摆角叠加到吊重的摆角上即可实现。本方法实现简单和快捷。
2.5 声音及帮助系统
本系统提供立体声音效,既包括实际作业中的声音,如:工作铃音、哨音、碰撞声音等,又引入提示、警告等不同用途的系统帮助声音。操作过程中如出现不规范或有违规程的动作,系统将予以警告,并给出正确操作方法的提示,帮助培训人员独立地完成受训项目的操作。
3 结束语
本文介绍了塔吊模拟培训系统的开发过程。利用操作手柄和按钮可以控制计算机中的塔吊进行操作,实现塔吊各机构和吊重的真实感运动。本系统按照国家有关标准设置训练和考核场景,并提供提示与帮助信息,帮助培训人员独立地完成受训项目的操作。先用本系统进行模拟培训,再进行真机培训可以极大地降低培训成本,降低油耗。
本系统属于桌面级的虚拟现实系统,优点是成本低,缺点是沉浸感相对较低,将来可以将力反馈等装置加入到系统中以提高沉浸感。
[1] 孟宪颐, 刘勇. 虚拟现实技术在塔机司机训练培训中的应用[J]. 2006. 中国工程机械学报. 4(4): 444-447.
[2] 夏显明, 陈宁, 佘建国, 等. 基于MultiGen Creator和Vega工程机械仿真研究[J]. 2005. 江苏科技大学学报(自然科学版). 19(6): 79-83.
[3] 魏国前. 起重机模拟培训系统若干关键技术研究[D]. 武汉理工大学. 2007.
[4] 中华人民共和国建设部. 塔式起重机驾驶员(技师)[M].北京: 建筑工业出版社. 2005.
[5] 桥式起重机吊重二自由度摆角模型与仿真[J]. 2006. 西南交通大学学报. 41(6): 696-699.
[6] 高丙团, 陈宏钧, 张晓华. 龙门吊车系统的动力学建模[J].2006. 计算机仿真. 23(2): 50-52.
[7] 小车吊重系统摆振动力学模型及仿真[J]. 2007. 计算机仿真. 24(11): 316-319.
[8] 魏雨龙. 岸边集装箱装卸桥吊具减摇装置的研究[D]. 上海海事大学. 2005.
