一种多功能家用升降平台的设计与开发
2012-07-11马远扬李智祥
马远扬,李智祥
(武汉理工大学 机电学院,武汉 430070)
0 引言
如今,各种实用的自动化机械纷纷进入现代生活家庭,极大的方便了人们的生活。随着我国城镇化改造的进行,城市人口的增加,土地的日益减少,生活空间变得越来越狭窄,而且由于人们的生活水平不断提高,生活资料和家居越来越多,对存储空间要求也越来越多。因此,家庭里的储物柜正变得越来越高。在不久的将来,可能出现这样一种情形,即家庭里的物品摆放变得像码头的集装箱一样井然有序,以便节省宝贵的空间。通过我们对大量家庭的采访以及据此对未来生活作出的设想,我们大胆的得出这样一个结论,物品的取放自动化将会是一种趋势,能大大地提高人们生活的舒适度。
通过调查发现,目前的载重升降装置大致有三大类:1)导链固定式升降机;2)曲臂式升降机;3)剪叉式液压升降机。通过分析比较三种方式有些不足,主要表现在:功率大、体积大,不能适用于家庭。而集载重升降和自动取物功能于一体的装置在市场上还是一个空缺。因此本论文设计和开发了一种多功能家用升降平台,具有体积小、自动化程度高、便于收藏等特点。

图1 平台升起
1 多功能家用升降平台的设计方案
1.1 主要功能

图2 变为桌子
该升降平台最大取物高度为220cm,自动放物时,将平台升起至指定高度,利用可伸缩的传送带,可将物品传输至储物柜指定位置。自动放物时,先利用机械臂将物品抬起,然后将可伸缩的传送带伸至物品底部,反向传送,将物品取物。自动取物、放物过程均为遥控操作。平台自动取物能承受的最大重量为25KG。为了避免闲置时占用额外空间,平台在闲置时可将下方伞状桌面升起,平台便变形成为一张边长100cm的方桌。
1.2 升降方案

图3 剪叉杆升降机构
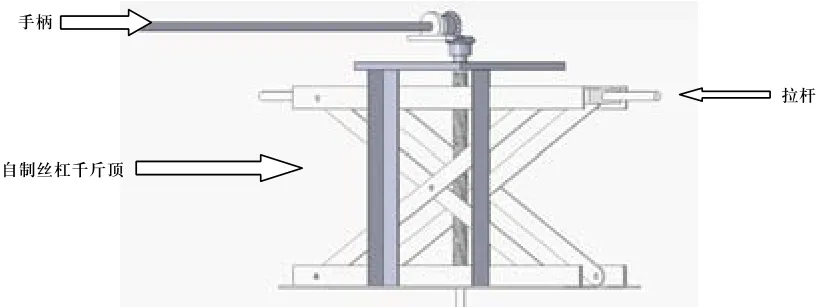
图4 丝杆千斤顶
升降机构主要包括两部分:丝杠千斤顶和剪叉杆升降机构。
丝杠千斤顶主要由一对伞齿机构和丝杠螺母副组成,拉杆中间与丝杠通过螺母连接,两端与剪叉杆连接,摇动手柄,通过伞齿机构带动丝杠转动,在丝杠螺母副的作用下就可带动拉杆上升和下降,这样,拉杆就可带动剪叉杆升降机构完成升降动作。
1.3 自动取放物品方案
自动取放物品的实现由传送带装置和辅助机械臂完成。自动放物时,将平台升起至指定高度,利用可伸缩的传送带,可将物品传输至储物柜指定位置。自动放物时,先利用机械臂将物品抬起,然后将可伸缩的传送带伸至物品底部,反向传送,将物品取物。
1.3.1 传送带装置
自动取放物品功能的说明:
1)载物平台上装有两个电机(图5中1、2部分);
2)电机1通过齿轮传动带动传送转动,依靠带面与物体间的摩擦力作用,传送带即可运送物体;
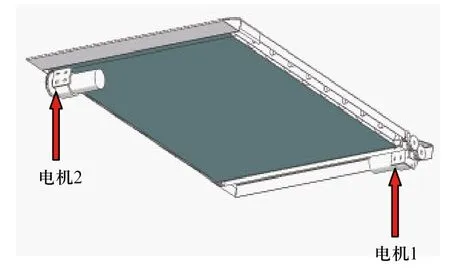
图5 传送带部分

图6 传送带伸出平台
3)电机2通过齿轮与按装在传送带外框的齿条啮合,可使传送带整体向外伸出或收回如图6所示。
4)通过电机1、电机2的配合运用,就可实现将物品放在储物柜不同深度的功能。
1.3.2 辅助机械臂装置
辅助机械臂安装在齿条上,将辅助传送带取物。通过一个主动电机,借助两个电磁离合器(图8中1、2)实现多个动作的顺序进行。具体动作顺序如下:
1) 电动机通电。当离合器2通电时。原动机通过丝杠上的螺母转动,在丝杠螺母副的作用下,螺母将沿着丝杠前后移动,从而使得与螺母固定在一起的机械臂整体前后移动。
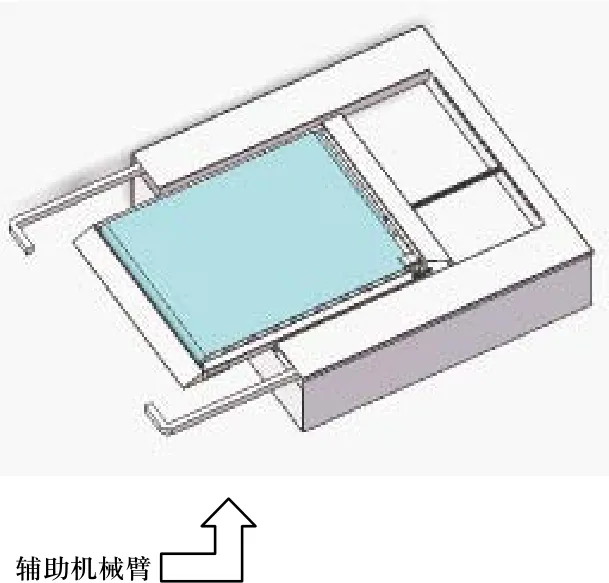
图7 辅助机械臂

图8 机械臂传动
2)离合器2断开,离合器1通电时。原动机带动右侧蜗轮蜗杆转动,与涡轮同轴装有一个齿轮,齿轮与两条齿条啮合,齿轮的正传、反转就对应着机械臂的夹紧与张开。
3)当夹紧过程完成后,机械臂下部电磁铁通电,机械臂前部夹紧部位向上抬起。此时,传送带就可伸入物品下部将物品取上带面。
1.4 伞状桌面
当升降平台闲置时,可利用伞状机构将平台四面的四块桌面板同时升起,即可形成一张大的方桌使用。这样,既不用占用家中的闲置空间又增加了产品的实用性。桌面的张开将借助于伞状张合机构如图10所示,就像雨伞一样。当上方的滑块向上滑动,与滑块相连的连杆机构沿着滑轨上升,当连杆机构上升一定高度后,到达滑轨的死点位置,将四块面板撑住;而要将桌面面板收起时,只用向下推动滑块,将杆件推过死点位置,四块面板即可降下。
2 多功能家用升降平台的控制电路
该自动升降平台采用单片机完成整个系统控制,详细电路如图11所示,多功能家用升降平台主要由控制装置——遥控及接收器0038、控制器——STC89C52、隔离器件——TLP521、电机驱动器——L298N、离合器驱动——继电器等组成。
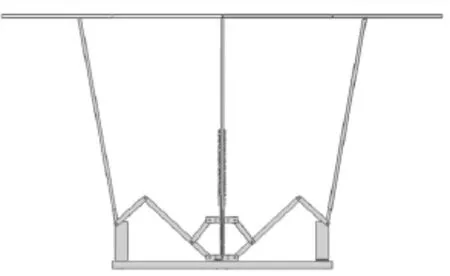
图9 伞状桌面展开

图10 伞状机构
其中,S1,S2,S3表示三个限位开关,S0为一个复位开关,P3.2口连接红外接收器0038的一个引脚。
首先遥控通过按键发送控制信号,红外接收器0038接受信号通过单片机的P3.2口中断接受信号,单片机再通过解码程序识别对应的按键,然后对每个对应的按键进行相应的操作。
控制系统硬件组成为:
单片机接收遥控器发出的命令后,根据接收的键盘命令可进行相应的操作。当L298N输入端IN1、IN2端输入“1,0”、 “0,1”且使能端EN为“1”时,电机可以正反转,当使能为“0”或是输入端为“0,0”、 “1,1”时电机停止转动。通过对L298N输入端与使能端发高低信号即可实现对电机的正反转与停转操作,从而可以实现通过遥控器对电机的正反停操作。离合器与电磁铁的驱动由继电器完成,单片机IO口通过8050三极管和光耦电路驱动继电器,即能实现对24V离合器与电磁铁的操作。
同时,在机械臂与载物台端边装设光电开关,通过光电开关检测机械臂及运载目标是否已经达到预定的位置,再将检测到的信号发给单片机,最后通过单片机控制电机的运动状态。这样通过对电机正反转及离合器、电磁铁的控制,即实现了对机械臂的前近后退,横向纵向运动控制。
3 多功能家用升降平台的特点与不足
综合目前现有产品的不足,经过多方面的改进与完善,本论文所设计的产品具有以下特点:
1) 采用单片机作为该家用产品的核心控制元件,自动化程度大大提高;
2) 通过传送带和辅助机械臂的巧妙设计,可实现了自动放物、取物的功能;
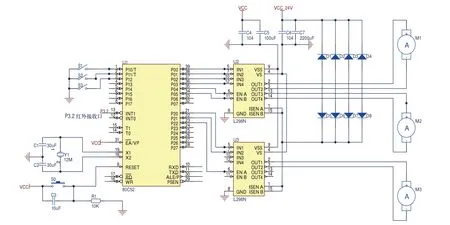
图11 单片机自动控制系统
3) 多功能,放可作为升降机取放物体,收可作为桌子使用。
同时本论文所设计的产品由于丝杆千斤顶的作用点在第二层剪叉杆上,导致阻力臂较大,带动千斤顶需要较大功率。如果剪叉杆降得过低,相连两层剪叉杆之间的夹角太小,就会出现压力角过大的问题。另外辅助机械臂抬起物品的作用力,是机械臂与物品之间的摩擦力,因此要求机械臂有足够的强度能够提供足够的夹紧力,机械臂前端还要安装摩擦片。
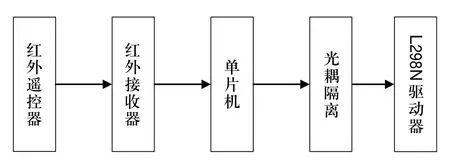
图12 控制原理图
[1] 濮良贵, 纪名刚. 机械设计[M]. 北京: 高等教育出版社.2006.
[2] 张占新. 材料力学[M]. 西安: 西北工业大学出版社.2005.
[3] 于永泗, 齐民. 机械工程材料[M]. 大连: 大连理工大学出版社. 2007.
[4] 机械设计手册编委会. 机械设计手册. 北京: 机械工业出版社. 2005.
[5] 大连理工大学工程图学教研室. 机械制图(第六版)[M].北京: 高等教育出版社. 2007.
