激光雷达系统在大尺寸地形扫描中的应用
2012-07-11陈启威庞贺伟唐赖颖杨再华易旺民
陈启威,孙 刚,庞贺伟,唐赖颖,杨再华,易旺民
(1. 北京卫星环境工程研究所,北京 100094;2. 中国空间技术研究院,北京 100094)
0 引言
为了深入研究和掌握月面特殊环境(低重力、月表地形地貌、月壤、月尘、月表温度等)[1]对探测器探测活动的影响,将开展探测器在模拟月面地形[2]条件下的功能、性能专项试验评价研究,以验证其行走、越障及爬坡能力。在探测器专项试验研究中,首先需要测量获得模拟月面地形的 DEM图,以此作为器上设备的检测手段,并且与位姿测量系统联合辅助探测器实现自主行走的“沙盘”演练。
经纬仪测量系统、全站仪测量系统、激光跟踪测量系统、数字工业摄影测量系统及激光扫描测量系统等在三维地形测量领域具备各自的测量优势[3-6]。针对模拟月面地形测量范围大、精度高、光照环境复杂以及测量时间短等特点,本专项试验的地形测量采用美国Metris公司MV330型激光雷达系统。激光雷达系统在进行大尺寸地形扫描测量时,将受到最大测量距离、最大测量俯仰角以及景深等限制条件,为此,需要通过多站点测量、高度限制和扫描区域限制等措施来实现模拟月面地形的扫描测量工作。针对测量站点布局、位置参数设置和扫描参数最大化设置等技术问题,本文开展了激光雷达系统在大尺寸地形扫描的应用研究。详情如图1所示。
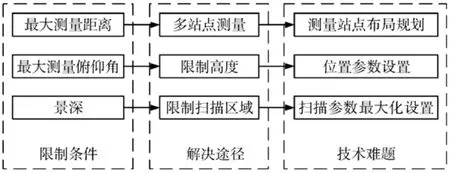
图1 大尺寸地形扫描的限制条件、解决途径及技术难题Fig. 1 Restrictions, solutions and technical problems of large-size topography scanning
1 测量方案的选定
三维地形高精度测量一般采用非接触三坐标测量系统,根据原理不同可以大致分为空间测角测距法、模式识别摄影测量法和激光扫描法。空间测角测距法的采点密度和测量效率较低,难以应用于大尺寸地形扫描测量;模式识别摄影测量法的像点匹配较为困难,测量范围小、速度慢,而且易受测量环境光照条件的影响;激光扫描法的测量范围大、速度快,而且采点密度高,也不易受外界环境影响。
模拟月面地形的专项试验场测量区域为30 m×30 m,测量精度要求在高度方向为5 mm、水平方向为10 mm×10 mm,试验场光照环境复杂,且要求测量时间短,因此非常适合激光扫描法。
目前比较成熟的激光扫描仪器有 Leica ScanStation系列扫描仪、Faro Scene系列扫描仪、美国GSI公司的V-STARS测量系统以及美国Metris公司的激光雷达系统。尽管Leica C10和Faro扫描仪是专业的地形测量系统,但其测量精度较低。V-STARS系统测量精度高且速度较快,但其单机测量范围较小,拼接次数过多。与其他测量系统相比,激光雷达系统测点精度最高,测量范围大、速度快,因此本专项试验场的地形测量选用美国Metris 公司MV330型激光雷达系统。
2 测量站点布局
美国Metris 公司MV330型激光雷达的测量距离为 1~30 m,水平角测量范围为±180°。扫描测量工作将受到激光雷达最大测量距离的限制,一般无法一次性完成大尺寸地形的测量任务,需要在测量工作中进行多站点布置测量。因此,针对大尺寸地形扫描测量,首先需要在测量区域边缘布置若干个测量站点;然后在每个站点使用激光雷达系统分别扫描相应的地形区域;最后将各个站点的测量数据在统一的坐标系下进行地形地图的拼接。测量站点的布局需要根据测量场地的地形情况、激光雷达的测量范围、测量时间要求等进行合理规划,兼顾测量的完整性、重点性和快速性。
专项试验场的月面模拟地形参数如图2所示,试验场左半部分是直径为30 m的半圆形试验区,右半部分是15 m×30 m长方形试验区,其中包括模拟月坑(直径为2~10 m、深径比为0.1~0.3)和障碍物(高度或深度0.1~0.4 m不等、长度0.1~0.6 m不等)。由于图2中的坡道区和模拟月面区的地形复杂性,是激光雷达测量站点布局需重点考虑的两个区域。
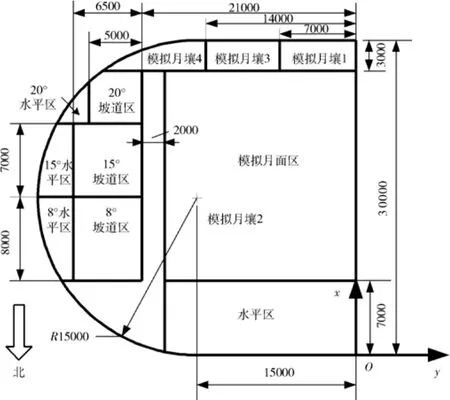
图2 试验场地形图Fig. 2 The dimensions of experimental area
为了满足测量数据无缝拼接的要求,测量过程中激光雷达相邻的站点间距不能超过 2倍的激光雷达最大测量距离(与激光雷达测量高度密切相关),同时测量站点布局必须使激光雷达的测量范围覆盖整个测量场地。
激光雷达系统的扫描模式主要有“Vision Scan”和“Metrology Scan”,它们对应的精度和速率均不同,其中“Vision Scan”侧重于快速扫描,而“Metrology Scan”侧重于高精度扫描[7]。对于地形扫描,扫描所需时间由总测量面积(试验场面积)和扫描速率决定。总测量面积依据测量站点布局而定,扫描速率依据扫描模式而定,总测量面积越小,扫描速率越快,则地形扫描所需时间越短,效率越高。
根据上述3个方面的条件约束,针对专项试验场地形测量技术要求,经比较分析后制定如图3所示的测量站点布局,激光雷达依次在站点L1、L2、L3处分别对地形进行“Vision Scan”扫描,图中2个红线区域至少需要2个测量站点对其进行扫描,在 3个站点测量结束后如有需要再对局部进行补充测量,主要是坑和石块等聚集地。
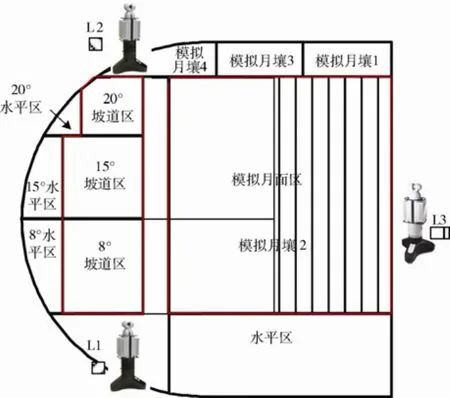
图3 测量站点布局Fig. 3 Layout of measurement sites
每个站点测量得到的地形数据都是基于各自站点激光雷达坐标系,因此需要将各个站点的测量数据转换到统一的试验场坐标系下。为了实现转换,在地形测量前就必须在场地周围和场地内布置若干标准靶球作为公共基准点,用来建立每个站点之间的相互位置关系。在每个站点的测量过程中都必须测量当前站点坐标系下这些公共基准点的坐标,然后根据这些公共基准点的相对坐标关系将不同站点下测量得到的地形数据整合到同一坐标系下,实现多区域多视场的拼接。专项试验场地形扫描测量过程公共基准点的布局如图4所示。
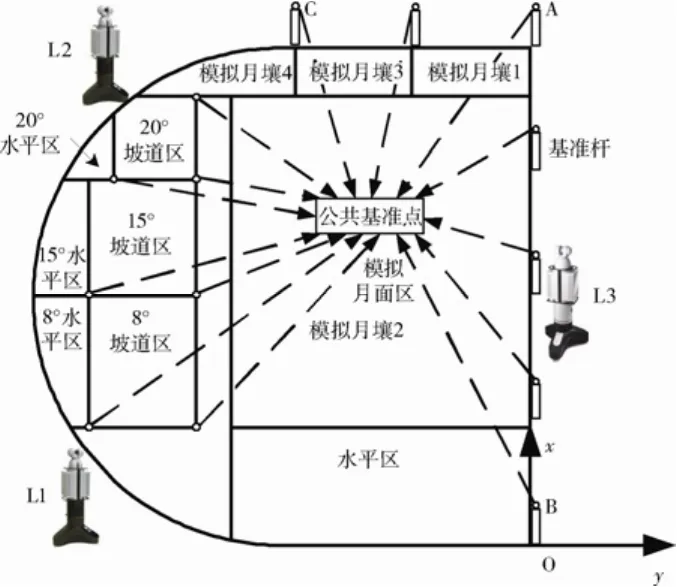
图4 公共基准点布局Fig. 4 Layout of reference datum marks
3 位置参数设置
激光雷达的位置参数主要是指激光雷达距测量场地的距离和测量高度,如图5所示。激光雷达系统是激光发射式测量系统,测量质量与激光的发射量正相关。因此对于大范围平面扫描测量,通过提高激光雷达的高度h可以增大激光雷达对试验场中地形测量的入射角,从而提高地形表面对激光的反射量,进而提高测量质量。不过受到激光雷达俯仰角测量范围的限制,激光雷达不宜安放过高,以免无法对场地边缘区域进行扫描测量。激光雷达的最大测量距离和外围场地的大小也制约了激光雷达与场地边缘的距离l不宜过大。

图5 激光雷达位置参数与测量场地关系示意图Fig. 5 Relation between Laser Radar’s location parameters and measurement area
专项试验场地形的最大高度为2 m左右。在地形测量中,激光雷达俯仰角的测量范围为-45°~45°,其扫描头的高度为1.6 m;L1、L2和L3测量站点与试验场的最大距离l分别为3.6 m、2 m和1.75 m,因此激光雷达的最大测量高度h在L1点为3.6 m,L2点为2 m,L3点为1.75 m。在试验中将激光雷达放置在可移动的升降车上,根据不同站点的测量条件可调整激光雷达高度进行地形扫描测量。
4 扫描参数最大化设置
在测量过程中,激光雷达测量参数的设置非常重要,主要包括点间距、线间距、扫描高度、扫描宽度、质量阈值、信噪比等。点间距和线间距的设置直接关系到测量精度和测量速度,对于高精度要求和复杂地形区域设置较小的点、线间距进行扫描测量,否则可以设置较大的点、线间距以提高测量效率;扫描高度和扫描宽度直接关系到测量数据的质量和拼接效果,扫描范围过大可能超出景深,扫描范围过小可能无法进行地形拼接,影响测量速度;质量阈值则直接关系到数据的质量,测量得到的数据点的质量只有超过阈值才会被接收,复杂地形的扫描应适当提高阈值以去除杂点,否则可以降低阈值来增加数据密度;信噪比直接关系到信号的有效性程度,对于质量较高的数据,较大的信噪比能够减少噪点数据,而对于质量较差的数据,较大的信噪比却有可能会屏蔽掉有效点数据。因此在测量过程中往往都需要实时调整测量参数以适应不同的测量需要。以下重点分析在扫描测量过程中扫描高度和扫描宽度的设置。
激光雷达测量时存在景深限制,如果测量区域超出当前激光雷达的景深范围,将无法得到正确的地形数据,甚至会出现空白区域;同时在扫描过程中不能改变焦距。因此为了得到正确的地形数据,需要保证整个区域在同一景深范围内,对于不可能一次性扫描测量的大面积地形,需要进行分块扫描。在长距离的区域扫描过程中,景深的大小直接限制了激光雷达扫描高度和扫描宽度的设置。
4.1 最大扫描高度
景深与激光雷达扫描高度的关系如图6所示。
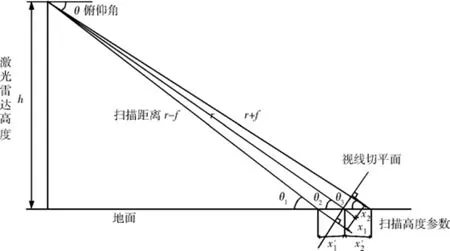
图6 激光雷达俯仰方向测量模型Fig. 6 Measurement model of laser radar in pitching direction
图6中,h为激光雷达的高度;r为激光雷达的测量距离;f为激光雷达的景深;θ为激光雷达的测量俯仰角;θ1、θ2、θ3分别是测量距离为r-f、r、r+f时与地面的夹角;x1、x2为激光雷达视线切平面上的扫描高度;x’1、x’2为激光雷达扫描高度在地面上的阴影大小值,即

计算得知:若x’1>x’2时,则扫描高度应以x’2为基准,令x’max=x’2,在视线切平面上的激光雷达扫描高度xmax为

4.2 最大扫描宽度
景深与激光雷达扫描宽度的关系如图7所示。
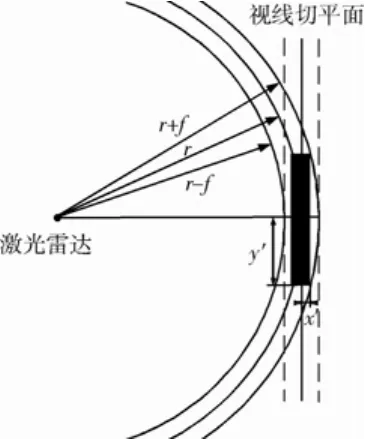
图7 激光雷达方位方向测量模型Fig. 7 Measurement model of laser radar in azimuth direction
图7中x’、y’分别为激光雷达扫描高度和扫描宽度在地面上的阴影值。
激光雷达在扫描过程中需要满足 0<x’≤x’max,0<y’≤y’max,其中y’max是x’的函数,需要满足

那么可以得到

而在视线切平面上的激光雷达最大扫描高度ymax为

4.3 最大扫描面积
图7中阴影部分的面积,即当前扫描面积为

要实现阴影部分面积的最大化,对式(5)进行微分,得

求解上式可得到最大扫描面积S与测量距离r、扫描高度x、扫描宽度y之间的关系。
假设激光雷达的高度h=3.6 m,景深f=800 mm,可以得到S、r、x、y的关系曲线如图8~图10所示。

图8 扫描高度x、扫描宽度y与测量距离r的关系Fig. 8 Three-dimensional curve of box height (x), box width(y) and range (r)
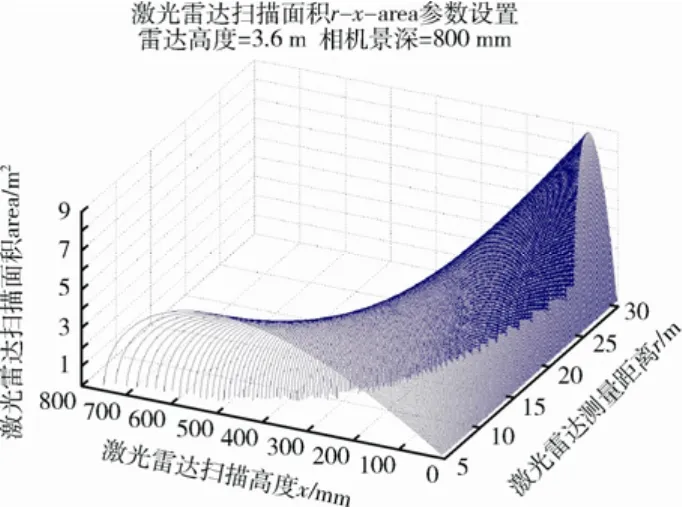
图9 扫描面积S、扫描高度x与测量距离r的关系Fig. 9 Three-dimensional curve of area (S), box height (x)and range (r)
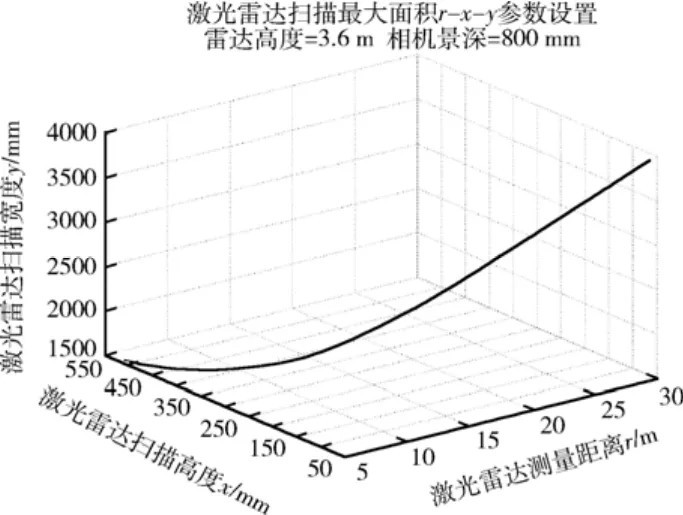
图10 最大扫描面积时扫描高度x、扫描宽度y与测量距离r的关系Fig. 10 Three-dimensional curve of box height (x), box width (y) and range (r) under the maximum area
从这些曲线图中可以得出以下几点结论:
1)随着测量距离的增加,景深对扫描高度的影响逐渐增大,扫描高度的有效最大值明显减小,从5 m处的800 mm减小到30 m的100 mm。
2)随着测量距离的增加,景深对扫描宽度的影响逐渐减弱,扫描宽度的有效最大值逐渐增加,从5 m处的2 500 mm增加到30 m的7 000 mm。
3)最大扫描区域基本呈扁平状,最大扫描面积随着测量距离的增加而逐渐增大,在5 m远处大约有5 m2的扫描面积,在30 m远处大约有9 m2的扫描面积。
4)要获得最大的扫描面积,扫描高度和扫描宽度需要随着测量距离的变化而不断变化,三者之间存在函数关系,扫描高度从5 m处的500 mm减小到30 m的50 mm,扫描宽度从5 m处的1 500 mm增加到30 m的4 000 mm。
因此对于大面积扫描测量试验,必须划分多个区域进行分别扫描,才能得到有效可用数据,而且随着测量区域的不同,扫描高度和扫描宽度的数值需要适当调整。
另外激光雷达的高度、景深的大小也对扫描高度和扫描宽度的设置有很大影响,高度越高、景深越大,则最大有效扫描高度和扫描宽度也就越大。
5 结束语
三维激光扫描测量技术在自动化、长距离、大范围、非接触、高精度等方面具有优势,以往的计量型激光扫描仪主要用于复杂型面的快速三维成型测量与分析,本文首次将高精度的激光雷达系统应用于大范围月面模拟地形的测量,从设备布局和测量参数两个方面开展了激光雷达系统的技术应用研究。为实现大尺寸地形扫描测量,文章分析了激光雷达系统的测量站点布局和位置参数设置,重点研究了在景深条件限制下激光雷达的有效扫描高度和扫描宽度,以及为实现最大扫描面积时的扫描高度和扫描宽度设置。以上研究结果可为深空大范围扫描测量研究提供一定的参考。
(
)
[1]陈磊, 李飞, 任德鹏, 等. 月面和近月空间环境及其影响[J]. 航天器工程, 2010, 19(5): 76-81
Chen Lei, Li Fei, Ren Depeng, et al. Lunar surface and near lunar space environments and their effects[J]. Spacecraft Engineering, 2010, 19(5): 76-81
[2]张伍, 党兆龙, 贾阳. 月面数字地形构造方法研究[J].航天器环境工程, 2008, 25(4): 301-305
Zhang Wu, Dang Zhaolong, Jia Yang. Methods to construct lunar digital terrain[J]. Spacecraft Environment Engineering, 2008, 25(4): 301-305
[3]李广云, 李宗春. 工业测量系统原理与应用[M]. 北京:测绘出版社
[4]叶声华, 邾继贵, 张滋黎, 等. 大空间坐标尺寸测量研究的现状与发展[J]. 计量学报, 2008, 29(4A): 1-6
Ye Shenghua, Zhu Jigui, Zhang Zili, et al. Status and development of large-scale coordinate measurement research[J]. Acta Metrologica Sinica, 2008, 29(4A): 1-6
[5]李清泉, 李必军, 陈静. 激光雷达测量技术及其应用研究[J]. 武汉测绘科技大学学报, 2000, 25(5): 387-392
Li Qingquan, Li Bijun, Chen Jing. Research on laser range scanning and its application[J]. Journal of Wuhan Technical University of Surveying and Mapping, 2000,25(5): 387-392
[6]李广云. 非正交系坐标测量系统原理及进展[J]. 测绘信息与工程, 2003, 28(1): 4-10
Li Guangyun. Principle and developing trend of non-orthogonal coordinate systems[J]. Journal of Geomatics,2003, 28(1): 4-10
[7]Laser Radar MV330/350 User Guide[G]. Version 1.4.Nikon Metrology Inc, 2011
