自动码垛包装线上机器人的应用
2012-07-06单世平
张 钧 单世平
(兰州石化公司电仪事业部 甘肃 兰州 730060)
0 概述
目前机器人在自动码垛包装线上大量使用,已替代原来由人工码垛的工作,实现了机器人自动码垛机,减少了大量劳动力和劳动强度,大大提高了生产的效率。
1 机器人硬件组成
机器人由通用执行机构、检测、控制系统、手持示教控制器、手爪及人机界面五大部分组成。具体如下:
1.1 执行机构
即机器人本体,其中的运动部(转动部和移动部)称为关节,从仿生学角度将机械人本体的有关部位分别称为基座、平衡缸、腰部、臂部、碗部和手部。
1.2 检测、控制系统
包括机器人控制柜,码垛机控制柜,机器人6个轴的伺服数据采集卡、编码器、测温元件及限位开关组成;手爪控制部件由接近开关、光电开关、电磁阀及气缸等组成。
机器人控制系统的核心是机器人控制柜,其硬件组成如下:计算控制单元;轴计算单元;电源模块;整流单元;电容器储能单元;伺服驱动单元;通讯控制单元;继电器控制单元;串行测量电路板;后备电池及以太网通讯系统;强制风冷单元;急停开关、钥匙开关及按钮控制等组成。
1.3 手持示教控制器
手持示教控制器是机器人软件设置、编辑程序、参数设置、故障诊断、零点校对、抓取胶块点示教、胶块卸垛点示教等。
1.4 手爪
手爪是机器人抓取胶块的部件。包括连接阀兰、夹板、直线导轨、电磁阀、汽缸、接近及光电开关等。
1.5 人机界面
人机界面是对码垛机控制进行操作,是连接码垛控制柜和机器人控制柜总线通讯,人机界面主画面共有7个按钮,包括“工作参数查询”、“初始参数设定”、“I/O 点操作”、“系统故障查询”、“手动操作”、“自动操作”、“要求回零界面”,根据需要进行相应按钮操作实现机器人的自动码垛等工作。
2 控制系统组成
控制器可以安装一个或多个系统。该系统使用Robot Ware5&Robot Studio5软件开发橡胶码垛应用功能,应用程序用称为RAPID编程语言的特定词汇和语法编写而成。这种编程语言包含了一些英文指令。指令能实现的功能很强大,可以移动机器人、配置输出、读取输入。还能实现决策、重复其它指令、构造程序、与系统操作员交流等。
2.1 应用程序组件包括的内容
2.1.1 任务。包含了一个RAPID程序和系统模块,并实现一种特定的功能。
2.1.2 任务属性参数:设置所有任务项目的特定属性。
2.1.3 程序:通常都包含具有不同作用的 RAPID代码的程序模块。所有程序必须定义可执行的录入例行程序。
2.1.4 程序模块:每个程序模块都包含特定作用的数据和例行程序。每个模块表示一种特定的机器人动作或类似动作。
2.1.5 数据:是程序或系统模块中设定的值和定义。数据由同一模块或若干模块中的指令引用,其可用性取决于数据类型。
2.1.6 例行程序:包含一些指令集,指令是对特定事件的执行请求,它定义了机器人系统实际执行的任务。例行程序也包含指令需要的数据。
2.1.7 录入例行程序:被定义为程序执行的起点。每个程序必须含有名为main的录入例行程序,否则程序无法执行。
2.1.8 系统模块:每个系统模块都包含有实现特定功能的数据和例行程序。系统模块通常由机器人制造商或生产线建立者编写。
2.2 内存结构
2.2.1 主机RAM内存
RAM内存是主机位于计算机主板上的主要内存,内存在所有程序执行过程中通过处理器使用,该内存的内容包括:RAPID代码;配置数据,配置文件创建后不能更改;文本;内部状态,这些数据记录所有机器人轴的状态和位置、所有I/O以及与系统相连接的每一操纵器状态等;事件日志。
2.2.2 系统硬盘/闪盘驱动
这是控制模块的主要海量存储单元,位于控制模块前端。取决于控制器版本,存储单元是硬盘驱动或闪盘驱动,而且大小也不同,启动时,数据从硬盘驱动加载入RAM内存中。如果系统被人为关闭,或因停电而关闭,文件将保存到控制器硬盘或闪盘中。
2.2.3 SMB板(串行测量电路板)存储器
机器人识别数据、校准数据、负荷计时器数据保存于此。
3 工作原理
码垛机器人是整个码垛机设备的核心部分。该码垛机采用ABB生产IRC5系列码垛机器人,该机器人臂展2.55米,有效负载180kg,该机器人是6轴多自由度运动系统,通过6轴的联合运动来完成手臂水平前后运动,垂直升降运动,本体回转运动以及手腕的旋转运动,并保持手爪的垂直姿态。
码垛机器人的自动动作过程是通过人为示教确定其运动起点、终点,运行轨迹由机器人通过一定算法实现最佳运行路经。码垛机器人控制平台本身对机器人所能达到的空间位置有限位,对机器人起限位保护的作用。在机器人手腕部分有两个电磁阀和两个接近开关,实现在抓取位置的抓取检测控制和卸垛位置的卸垛检测控制,当机器人手爪夹板关电磁阀得电并且手爪夹板关到位接近开关有信号以后,机器人认为手中已经抓住胶块,然后才进行下一步动作,当机器人手爪夹板开电磁阀得电并且手爪夹板开到位接近开关有信号以后,机器人认为手中所抓胶块已经放下,然后才能进行下一步动作。码垛机器人在抓取至卸垛的码垛过程中同时完成编组计数的控制,以满足4/2和2/4编组的要求,编组方式为:横袋时2袋为一组,竖袋时4袋为一组。
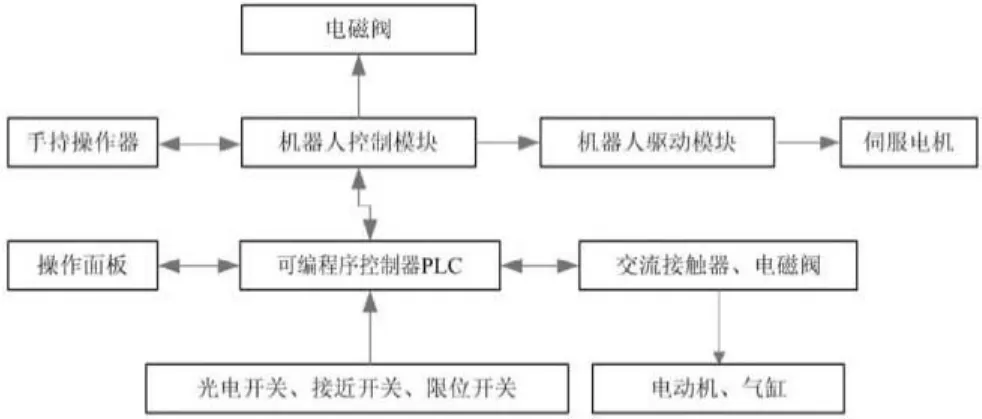
图1-1 电控系统工作原理框图
4 日常维护常见故障及原因分析
机器人常见故障有:过载、电脑主板烧坏、运行程序数据丢失、本体故障、示教点坐标数值偏差故障等。
4.1 最常见的故障是过载
过载分轻过载和重过载,发生轻过载后,机器人自动停止运行,故障复位后即可重新启动,继续执行未完程序。发生重过载后,机器人“回零”失败,只有对“零位”超程的轴进行“校零点”后方可重新启动。
原因分析:箱体变形;垛盘输送辊磨损;箱体定位气缸不到位;工艺原因,胶块变厚;发生超程故障后机器人6个轴的某些轴找不到初始位而需要校准零点位置;胶块试教点位置变动不准;由于突然停电,机器人停在某处,找不着初始位或主机数据丢失,校准零点后或恢复数据后与原来有偏差;胶块变形;操作工参数设置不当;缓停机上的胶块位置不正,机器人抓偏。
4.2 机器人电脑主板烧坏
机器人电脑主板烧坏主要是过电压引起,过电压产生是由于未按正常程序进行操作或防静电接地不好造成。
原因分析:设备运行过程突然停电;机器人停、送电操作不当,产生过电压(刚送电后电脑还在自检过程突然停电;刚停电后储能电容器电压还较高时马上又送电,造成控制电源过电压);机器人“回零”,即伺服初始化过程中操作“急停”之外的按钮、开关;防静电接地不可靠。
4.3 运行程序数据丢失
运行程序数据丢失是机器人的RAM内存中的内部状态,即记录所有机器人轴的状态和位置、所有I/O以及与系统相连接的每一操纵器状态等丢失,此故障通过“备启动”,用存储的故障前最近一次的正确内部状态进行启动,此时要对码垛机控制柜人机界面中有关块数和层数修改后再启动。
原因分析:设备运行过程突然停电;机器人“回零”,即伺服初始化过程中操作“急停”之外的按钮、开关;人为误操作造成数据丢失。
4.4 机器人本体故障
机器人手爪与本体的法兰连接臂断裂故障。
原因分析:手爪抓胶不牢,胶块未完全滑落,在手爪水平运动时与装胶箱体碰撞;机器人运动速度修改得太低,导致其运动轨迹变化后与装胶箱体碰撞;其他原因,装箱位的箱体被抬高,手爪水平运动时与装胶箱体碰撞。
4.5 机器人示教点坐标数值偏差故障
胶块示教点坐标数值偏差,引起机器人过载故障。
原因分析:是机器人多次过载故障后,在校轴的“零点”时位置偏移累积量大造成胶块位置示教点坐标数值偏差大引起擦箱和碰胶。
5 结论
通过上述分析,机器人长周期安全运行与维护是紧密相关的,我们必须做好每个环节,只有这样才能使机器人工作在最佳的状态,延长机器人的使用寿命。
[1]ABB机器人操作手册[S].
[2]ABB机器人故障诊断手册[S].
