基于ARMA的高精度GPS多普勒估计
2012-07-06杨晓波
杨晓波
(石家庄职业技术学院电子工程系 河北 石家庄 050081)
0 引言
GPS接收机在冷启动的情况下,对于接收机要进行码相位和载波多普勒的二维搜索,当对于卫星轨道没有任何先验知识的情况下,这个搜索范围是很大的,例如,对于地面静止的GPS接收机,不确定的多普勒范围是±5kHz[1],对于积分时间为1ms的传统接收机,多普勒分为21个500Hz的频率单元,500Hz对于PLL带宽来说多普勒估计太过粗糙[2],在一些接收机中,以FLL辅助PLL,先以带宽较大的FLL将载波频率估计锁定到PLL的捕捉频率范围,然后由FLL传递到PLL跟踪,但是由于FLL带宽较大,达到锁定状态需要40ms到50ms,为了改善这一情况,文献[2]提出对解扩后的信号利用FFT来估计载波多普勒,由于FFT分辨率受到信号长度的限制,也不能取得很好的效果。例如,在5MHz的采样率下,1ms数据采样点为5000个,只能达到1kHz的分辨率,要达到100Hz的分辨率需要10ms数据,50000个采样点,这样不但计算量增大同时需要大的存储空间。文献[3]提出提高多普勒频率估计的分辨率的方法,将多普勒搜索单元设窄一些如250Hz、125Hz,但该方法会加大搜索空间,并且非常耗时。
本文在研究GPS信号特点的基础上,提出利用谐波恢复的ARMA建模法[4]对载波多普勒进行估计,仿真结果表明该方法可以得到非常稳定和精确的多普勒频率估计。高分辨率的多普勒估计不但可以缩短从捕获到稳定跟踪的时间,同时可将跟踪环路的带宽设计的较窄以达到较好的抗干扰的目的。
1 GPS信号模型
接收机接收到的信号模型为:

其中
M:可见卫星个数
Di:电文
Pi:伪随机码
ωi:GPS信号载波频率加多普勒频率
τi:信号延迟
φi:载波初始相位
N(t):加性高斯白噪声
如果第j个信号被捕获,则解扩后的信号模型为:
上式等号右边第二项中Rij为第j个伪随机码和第i个伪随机码的互相关,研究表明互相关部分最大可能功率为-21dB[5],第三项为伪随机码和加性白噪声的相关。这两部分可以看作高斯白噪声,第一项为载波部分,其中载波相位φj是[-π,π]之间均匀分布的随机数。所以,解扩后的信号可以认为是平稳谐波过程与高斯白噪声的和,这样的观测信号,可以利用谐波恢复的ARMA建模法对载波的多普勒频率进行高分辨率的估计[6]。
当谐波信号在加性白噪声中被观测时,观测过程是一个特殊的随机过程,它的AR参数和MA参数完全相同,这一特殊的ARMA过程所服从的法方程为:

与修正的Yule-Walker方程类似,该方程可以构造超定的方程组,并使用SVD-TLS[6]算法求解。
具体算法:
式中 pe>2p,并且 M>>p;
步骤2 将矩阵Re当作增广矩阵,利用算法SVD-TLS确定AR的阶数2p和系数向量a的总体最小二乘估计;
步骤3 计算特征多项式

的共轭根 (zi,),其中 i=1,…,p;
步骤 4 利用 fi=arctan[Im(zi)/Re(zi)]/2π 计算载波的频率。
表1 本文采用的算法中奇异值分解特征值矩阵
2 谐波恢复的ARMA建模法
谐波恢复ARMA建模法由于使用了奇异值分解和总体最小二乘方法,整个计算具有好的数值稳定性,而且AR阶数和参数估计具有非常高的精确度。
图1 本文方法估计载波多普勒仿真图
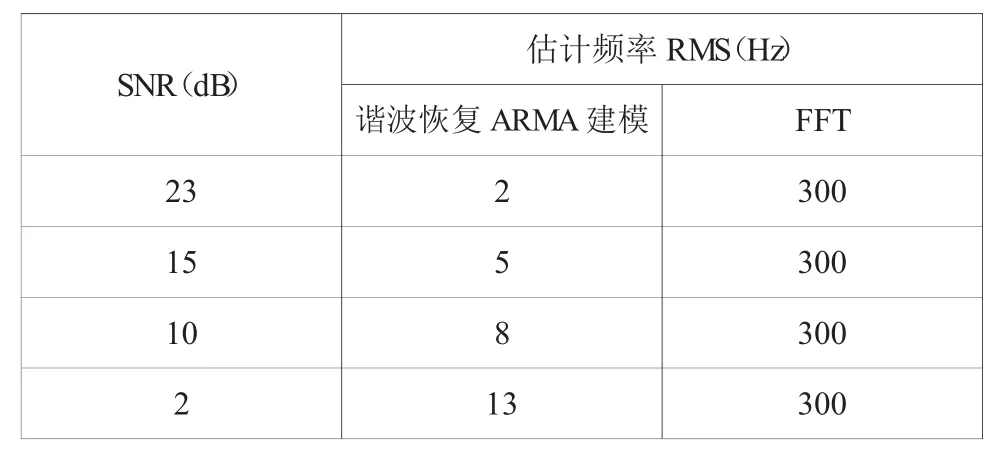
表2 频率估计RMS
3 仿真结果
本文利用MATLAB仿真,载波多普勒频率设为200.3kHz,仿真数据1ms,采样频率5MHz,由于估计的谐波频率只有 1个,所以 p=1,取 M=12,pe=10,当然也可以取其它值,只要满足扩展阶自相关矩阵的要求即可。表1为信噪比23dB时的奇异值分解特征矩阵,可以看出主要特征值2个,所以需要确定的AR阶数为2,谐波的个数即为1。
图1为20次仿真的谱估计图,可以看出每次的估计结果非常稳定,精确。
表2为仿真进行50次的频率均方误差和FFT的比较,由于FFT的频率分辨率对于1kHz的数据长度为1ms,其输出频率为1kHz的整数倍,所以其误差不随信噪比变化,为 300Hz。
另外,研究表明在MATLAB仿真环境下,对于1ms的积分时间,21个500Hz频率单元,需要125 e6次浮点运算,FLL若50ms达到稳定(频率牵引到20Hz内)需要40 e6次浮点运算,而本文采用的频谱估计方法学要20 e6次浮点运算,可见,采用高分辨率的载波多普勒估计可以大大减少从捕获到跟踪的时间。
4 结论
以上研究表明,对于解扩后的GPS信号,视为平稳随机过程和高斯白噪声的和,通过谐波恢复的ARMA模型法,对GPS多普勒进行高分辨率估计是完全可行的,可以取得非常满意的精度,以及稳定的结果,而且计算量也相对小得多,这对于减少GPS接收机从捕获到跟踪的时间,同时降低跟踪环路带宽以提高GPS接收机抗干扰能力是非常有意义的。
[1]Kaplan,E.Understanding GPS:Principles and Applications,Artech House,1996.
[2]Tsui,J.Fundamentals of Global Positioning System Receivers:A Software Approach.Wiley Inter-Science,2000.
[3]Lin,D.,Tsui,J.Comparison of Acquisition Methodes for Software GPS Receiver.Proceedings of ION:2385-2391,September,2000.
[4]Zhang X D,Takeda H.An approach to time series analysis and ARMA spectralestimation.IEEE Trans.Acoust.,Speech,Signal Processing,1987,35:1303-1313.
[5]Parkinson,B.,et al.(editors).Global Poisitioning System.Volume Ⅰ.American Institute of Astronautics and Aeronautics,1996.
[6]张贤达.现代信号处理[M].2版.北京:清华大学出版社,2003.
