船用柴油机故障诊断多信息融合技术研究
2012-07-04林凌海吴晶叶翠安
林凌海 吴晶 叶翠安
(广东交通职业技术学院,广州 510800)
0 引言
船用柴油机的工作过程[1]是复杂的,其故障诊断[2]信息也是复杂的。单个传感器只能获取局部的信息。对于现代船用柴油机,需要采用多种传感器来获取不同种类、不同状态的信息。这些信息彼此之间相互独立或耦合,甚至会出现彼此矛盾的情况[3]。协同使用多种传感器并将各种传感信息有效地结合起来,形成高性能感知系统来获取对环境的一致性描述的过程。迄今为止,没有任何一种传感器能够完全同时满足高可靠性、高稳定性、高精度和低成本的要求。但是各种传感器性能上的差异与互补性却提示我们通过综合分析来自各个传感器的信息,获取有效、可靠、完整的信息[4]。采用这种方法,即使各个传感器所提供的信息有一定的误差和不确定性,但通过对它们提供的信息进行有效的综合,可以比任何单一传感器获取的信息更可靠、更完整[5]。因此多传感器信息融合技术具有很大的应用价值和广泛的应用范围。
“信息融合”一词于20世纪70年代初由美国最早提出。由于该技术在军事上的重要性,立即引起了世界范围内的普遍关注。目前在美、英、日、德等国已开发出了一些实用的系统,其某些成果在1991年的海湾战争中得到了实践验证,取得了较理想的结果。
船用柴油机工作过程故障由于系统结构的复杂性,各机构运动的非线性,如用确定的线性解析模型诊断是不可能的[6]。传统的基于单传感器诊断又由于故障与症兆之间的不确定性而导致其诊断结果的不确定性。为了解决这种非线性和不确定性,应用多传感器的信息融合技术和模糊逻辑推理方法是一条有效的途径。
多传感器系统是信息融合的物质基础,实现多传感器信息融合要靠要各种具体的融合方法的实现。目前发展起来的信息融合方法有加权平均法、贝叶斯法、D-S证据法、神经网络和糊理论法、产生式规则法、卡尔曼滤波法等。在不同的场合,根据实际情况选用不同的方法。到目前为止,还没有通用的信息融合方法[7]。
1 材料与方法
1.1 BP神经网络理论
人工神经网络具有的容错、联想、推理、记忆、自学习和处理多模式等功能。网络的推理信息包含在各网络层之间的连接权值中,这些权值的作用就是将输入向量映射到输出向量。网络中的每个一节点只能从左边层的节点接受输入,且只能将它的输出送到右边层的节点。网络中的每一个节点都进行如下两种运算:

式中,j代表正在进行计算的网络层,I代表正在进行计算的网络层,I代表左边的网络层;ω点的输出,cj代表节点内部的阈值。网络中的连接权值 ωij和阈值 cj要通过学习得到,当神经网络的非线性函数是 Sigmod形,根据网络各节点之间的连接关系,可以得到网络的权系数和阈值的迭代方程为:

式中,对于隐层:

1.2 柴油机故障实验和特征提取
在型号 GN8320ZC4B船用柴油机上设置五种工作过程故障:即供油提前角提前(上止点前25°CA)、供油提前角滞后(上止点前 12°CA);雾化不良;进气不足;气缸漏气。
用B&K加速度传感器测取8个气缸的缸盖振动信号,应用夹持式压力传感器测取高压油管压力信号,对振动信号利用载荷识别技术,识别出气缸压力并撮两个特征值,Pmax-最大气缸压力,φpmax-最大压力角(最大压力点到上止点的曲轴转角),振动信号三个特征值,低阶小波包序列中段能量E1,中阶小波包序列后段能量E2,中阶小波包序列前段能量 E3,其中 E1反映了振动信号特征频带为0-2.5 kHz,时间由燃爆响应开始到结束这个范围内的能量,即由缸内燃烧气体压力产生的低频激振能量。E2反映了振动信号特征频带为 2.5-8.75 kHz,时间由燃爆响应开始到结束这个范围内的能量,即由缸内燃烧气体压力产生的高频激振能量。E3反映了振动信号特征频带为3.75-8.75 kHz,时间由喷油器落座冲击开始到结束点这个范围内的能量,即由喷油器针低落座冲击产生的高频激振能量;燃油压力波形,也选取三个特征参数,最大油压 Pymax,喷油提前角 αp(开始喷油点到上止点的曲轴转角)。脉冲因子If。其中为油压信号。六种状态下的八个特征值如表1所示。
2 多传感器信息融合神经网络诊断
把反映船用柴油机工作过程故障三种信号的八个特征值,按正常和五种故障状态的构造学习样本文集和检验样本文集,对输入进行归一化处理,把输出确定成[0,1]矩阵,100000,0100000,……000001分别代表正常状态、供油提前角提前(上止点前 25°CA)、供油提前角滞后(上止点前 12°CA)、雾化不良、进气不足、气缸漏气等六种状态,将学习样本输入一个8*5*8的BP网络,进行训练学习,在获得稳定的样本统计个数情况下,单传感器和多传感器信息融合识别结果如表2所示。表中诊断结果是检验样本的识别率。其识别率公式为:

从表2可以看出,各故障的识别率为100%,而且不管故障程度是严重还是较轻,它都能准确识别,如进气不足这样的故障,我们只是用堵住一部分进气门的方法模拟,它都能与正常状态及漏气状态准确识别开来。这充分说明了多传感器信息融合神经网络故障诊断的有效性和准确性。

表1 六种状态下八个特征值
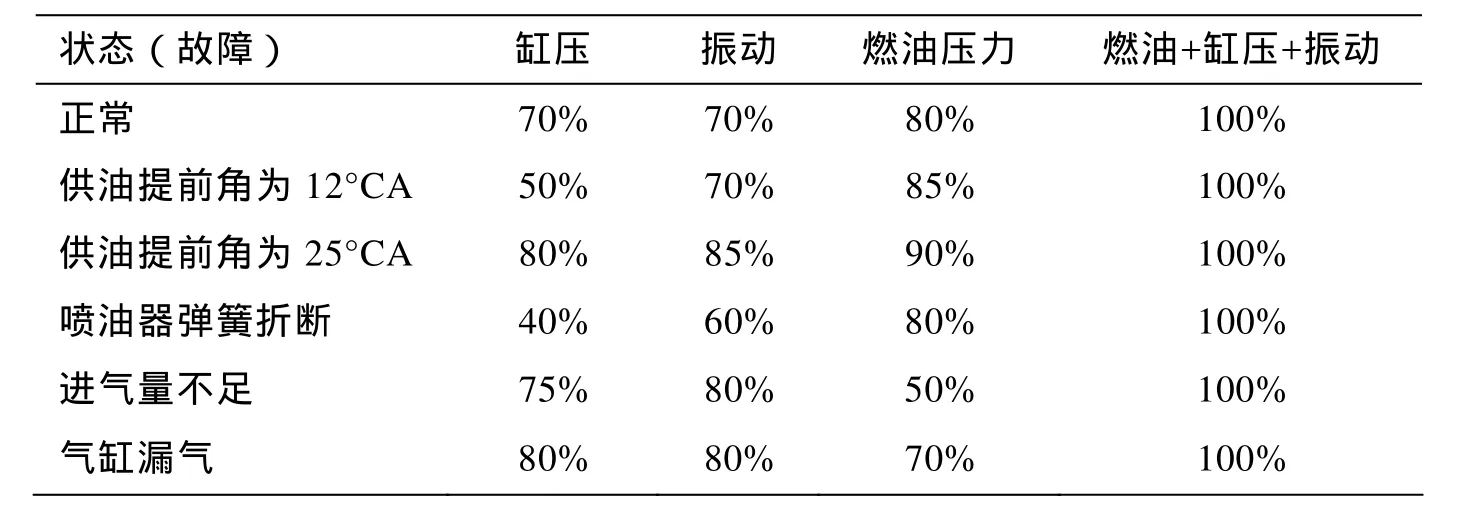
表2 单传感器与多传感器神经网络诊断结果对比
3 结论
1)基于单类传感器信息的船用柴油机工作过程故障诊断,由于船用柴油机工作过程的复杂性,使用单传感器反映故障的模糊性必然导致诊断的不确定性。
2)多传感器信息的故障诊断,由于不同传感器信息具有冗余性和互补性,信息融合后的故障识别率明显提高。
3)基于神经网络的信息融合方法适合于对船用柴油机工作过程故障的诊断,明显提高了诊断过程的准确性和智能化。
[1]刘嘉, 黄英, 黄千等. 基于SAE J1939协议的船用柴油机虚拟仪表及故障诊断系统开发[J]. 汽车技术,2007(6): 93-97.
[2]尚喆, 许镇琳, 王豪等. 基于神经网络的电动转向系统助力特性研究[J]. 汽车工程, 2004, (03):125-128.
[3]陈斌. 基于 S3C4510B型微处理器的最小系统设计[J]. 国外电子元器件, 2006,(03):132-136.
[4]过锡隽. 汽车电控系统 J1939协议和诊断通信模块的开发[D]. 浙江大学硕士学位论文.杭州:2006 .
[5]王伟, 吴珂, 赵云峰. 军用电控汽车故障自诊断系统开发设想[J]. 专用汽车, 2005, (03): 56-60.
[6]吴金林, 翁维熊. MVC—2M故障诊断系统通过部级成果鉴定[J]. 船舶工程 , 1992,(01):74-77.
[7]刘桂雄, 方晓东, 易静蓉, 冯云庆. 以太网智能测控系统中虚拟仪表软件的实现[J]. 华南理工大学学报(自然科学版), 2003, (12): 93-97.
