嵌入式系统在探测型水下电视系统中的应用
2012-07-02卢海洋
查 智,卢海洋
(中国船舶重工集团公司第七一〇研究所,湖北 宜昌 443003)
水下电视系统广泛应用于海洋研究与开发的各个方面,包括海底科学考察、海底地形测绘、海洋生物研究、水下安保工作、水下武器试验监控和测量、沉船打捞和油田深海作业等。在某大型坝区水下坝面检测项目中,需要对某坝面进行全面检测,利用水下电视系统把水下情况实时转换成视频信号,并远程传输到中央控制室的计算机上,在显示屏上实时显示。通过远程控制系统,操作人员可以在控制室远程控制水下电视系统的各个部件,实现远程控制功能[1]。
1 系统总体设计
本系统总体框图如图1 所示。移动水下电视系统由2台水下环境中视场角为不低于45°的水下摄像机组成。每1台水下摄像机配备两个卤钨灯光源,在光线不足时补充照明,从而完成24 h 监控任务。摄像机和光源的电源由水下控制单元控制。系统包含摄像机的2 路视频信号和四个灯及两路摄像机电源控制信号,这几路信号的远距离传输功能由1 套光端机组和光纤实现,传输距离可达5 km 以上。水下控制单元的控制信号与光端机发送端的串口相连接,2 路视频信号分别与光端机发送端的2 个视频口连接,水下光端机发送端把2 路视频信号和串口信号调制成光信号通过光纤传输给水面光端机,同时将光信号解调成电信号,即串口信号,用来控制各执行结构。水面光端机接收端把光信号分别还原成电信号,用于显示与监控;同时将电信号调制成光信号发送给水下光端机。
2 硬件设计
2.1 LX3160 工控机
PC104 工控机,它是与普通PC 机100%兼容的层叠式嵌入计算机,超小体积和功耗,单+5 V 供电,宽工作温度范围,使PC104 被广泛应用于航空、航天、航海等对体积、功耗和可靠性有严格要求的场合。PC104 资源丰富,百兆以上的CPU、4 个串口、多路可编程数字I/O 口、10M/100M 自适应网口、USB 口,通过总线可扩展其它板卡,增加串口、8255、CAN等多种资源,且PC104 运行极其稳定,是一种首选的工控机。PC104 硬件资源框图如图2。
2.2 ADT800 采集板
模拟输入:16 单端/8 差分输入;16 位分辨率;200 kHz最大A/D 采样率;量程0 ~+10V,+ / -5V,+ / -10V,双极性或单极性输入量程;×1,2,4,8 倍可编程增益;FIFO:1024个数据深度;触发方式:软件、外部TTL、定时器;数据传输:I/O查询、中断、DMA。
模拟输出:4 通道输出;12 位分辨率;-5 ~+5V,-10 ~+10V,0 ~5V,0 ~10V 量程。
数字I/O:uPD71055(82C55)可编程外围接口(PPI);24通道TTL/CMOS 兼容;I/O 接口上拉或下拉限流电阻;74HCT245 驱动I/O。
计数器/定时器:82C54 可编程定时器,含3 个16 位,最大10 MHz 计数/定时器;计数器/定时器可选时钟源(内部或外部),可级联。
2.3 水下电视控制底板硬件电路设计
新型移动水下电视有电机推进机构、电视电源控制、电视图像光传输设备、漏水报警电路、电压信号采集、电流信号采集等[3-5]。电视图像由水面操控台内的光端机还原为视频信号,再由采集卡采集传入计算机,进行图像显示。其中漏水报警电路原理图如图3,电机控制电路原理图如图4,电视电源控制电路如图5。
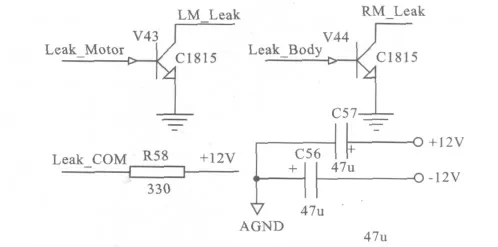
图3 漏水报警电路图

图4 电机控制电路图

图5 电视电源控制电路图
3 水下电视设计与组成
水下电视由水下摄像机与水下照明两部分组成,水下照明采用双灯方式,布置在水下摄像机的两侧,水下照明灯尽量布置在水下摄像机镜头后方,并与水下摄像机保持一定距离[2]。
3.1 水下照明基本组成
水下照明的组成框图如图6 所示,主要由光窗、光源、反光镜、密封体、水密电缆、控制装置等组成。
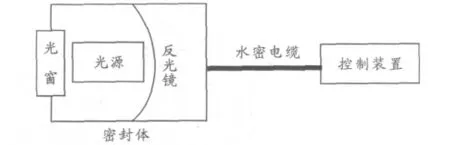
图6 水下照明组成框图
3.2 水下摄像机基本组成
水下摄像机的组成框图如图7 所示,主要由光窗、摄像机、密封体、水密电缆、控制装置等组成。

图7 水下摄像机组成框图
3.3 水下照明灯主要性能参数
水下照明的主要性能参数包括以下内容:水下光束开角:不大于60°;光源类型:卤钨灯;电压:24 V;单灯功率:30 W;使用最大水深:300 m。
3.4 水下摄像机主要性能参数
水下摄像机选用三洋电机的VCC-MD810PC,其主要性能参数包括以下内容:摄像头:1/4″ Exview HAD CCD;水平开角:广角时不低于60°;分辨率:520 线以上;灵敏度:0.05lux;电压:6 ~12 V;功率:2.1 W;工作温度:-10° -50°;重量:240 g;使用水深:300 m。
4 软件系统设计
4.1 操控台与水下控制单元串口通信协议
串口类型:RS232;端口地址:0x3 E8 ~0x3EF;IRQ:5;中断向量:0x0f;波特率:19 200 bit/s;数据位:8 bit;起始位:1 bit;停止位:1 bit;无奇偶校验位;数据包:二进制专用协议;通讯模式:全双工通讯;类型:二进制。
发送数据包格式:0x4a + 0x7e + 数据正文+ 效验和字节;
接收数据包格式:实时操控数据包格式:0x55 +0x33 +数据正文+效验和字节。
4.2 水下控制软件设计
系统软件结构框图如图8 所示。水下控制软件设计基于Vxworks 操作系统,开发环境为Tornado 2.2。根据水下电视系统的实际情况,把整个系统划分为模拟量采集、数字量控制与采集、电机速度控制与状态查询、数据通信、应急保护等几个任务。任务划分充分考虑到系统实时性与软件效率。根据水下电视系统的特点,将应急保护设置为最高优先级。进入运行状态后,在主任务中启动其它任务。
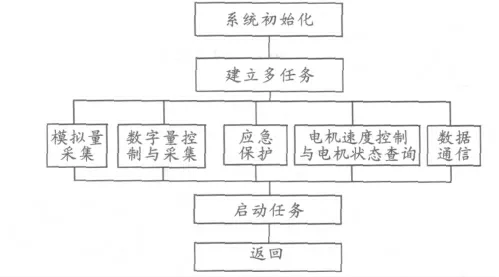
图8 系统软件结构框图
设计中的任务调度机制采用优先级调度模式:CPU 被分配给最高优先级任务,如果几个任务优先级相同,CPU 就被分配给最先进入就绪队列的任务。如果一个任务在执行过程中,另外一个优先级更高的任务进入就绪状态,则原来正在进行的任务进入就绪状态,新任务进入运行状态。实现各种功能的程序按照功能划分成了一个个的任务,每一种任务实现一种功能,任务之间相互独立,只通过实时操作系统RTOS(Real-Time Operating System)机制交换信息。这从根本上保证了软件的可靠性和实时性。
4.3 水面操控软件设计
水面操控软件设计基于Windows XP 操作系统,编程环境为Microsoft Visual studio 2005,编程语言为C#,软件主要完成操控指令的下发,接收水下控制单元的状态信息等,水面操控软件流程的如图9 所示。

图9 水面操控软件结构框图
5 结束语
由以LX3160 主板为核心的水下控制单元、光端机、推进电机、图像采集卡和相应的软件构成的移动水下电视系统,已成功应用于某大型水坝和某刑事犯罪案件水下取证等水下监控系统中,可避免使用潜水员的高危险性,降低了探测成本,使监控系统增加了智能化程度,提高了水下监控能力。应用结果表明,该系统实现了水下电视系统的远程控制功能,操作简单可靠,水下移动性能好,水下图像清晰,有较好的市场推广价值。
[1]孙传东,李驰,陈良益.水下电视远程控制系统的设计[J].舰船科学技术,2008,30(5):75-77.
[2]徐刚,王欣.水下电视成像系统在潜艇上的应用[J].舰船光学,2003,39(3):3-6.
[3]徐向民,邢晓芬,华文龙,李磊.ALtium Designer 快速入门[M].北京:北京航空航天大学出版社,2008.
[4]李现勇.Visual C++串口通讯技术与工程实践[M].北京:人民邮电出版社,2003.
[5]郑耀东. C#从入门到实践[M]. 北京:清华大学出版社.2009.
